Tu sei qui
REVIT Structure + ROBOT Structural Analisys_Interoperability
Cerchiamo di scoprire come le possibili soluzioni date da un utilizzo parallelo di questi due software possono aiutarci nella progettazione strutturale.
Questo collegamente serve infatti a snellire il "workflow" tra il disegno di progetto e le relative informazioni analitiche che provengono, invece, dal progetto della struttura: se REVITs aiuta il processo di modellazione permettendoci di creare un modello fisico (utile al disegno, alla documentazione e alla consapevolezza progettuale) e, associato a questo, un modello analitico, ROBOT funge da supporto con le sue analisi, proponendosi come "soluzione ai potenziali errori risultanti dalla cordinazione manuale tra i risultati delle analisi e le informazioni progettuali", e riducendo, inoltre, il tempo necessario alla creazione e all'aggiornamento di più modelli destinati a calcoli analitici.
In termini "architettonici" ROBOT serve a dare vita ad un calcolo degli elementi finiti e alle analisi che ci consentono di valutare il comportamento lineare e non lineare delle strutture, sia nella loro totalità che nelle singole parti.
Quindi, ciò che ci interessa capire sono i workflow tra questi due programmi, per capire nel modo più semplice possibile, attraverso una buona pratica nel disegno analitico, i dati e le informazioni scambiate.
Per iniziare ad utilizzare ROBOT e le sue funzionalità partiamo però da REVITs: abbiamo infatti utilizzato questo programma nella modellazione architettonica.
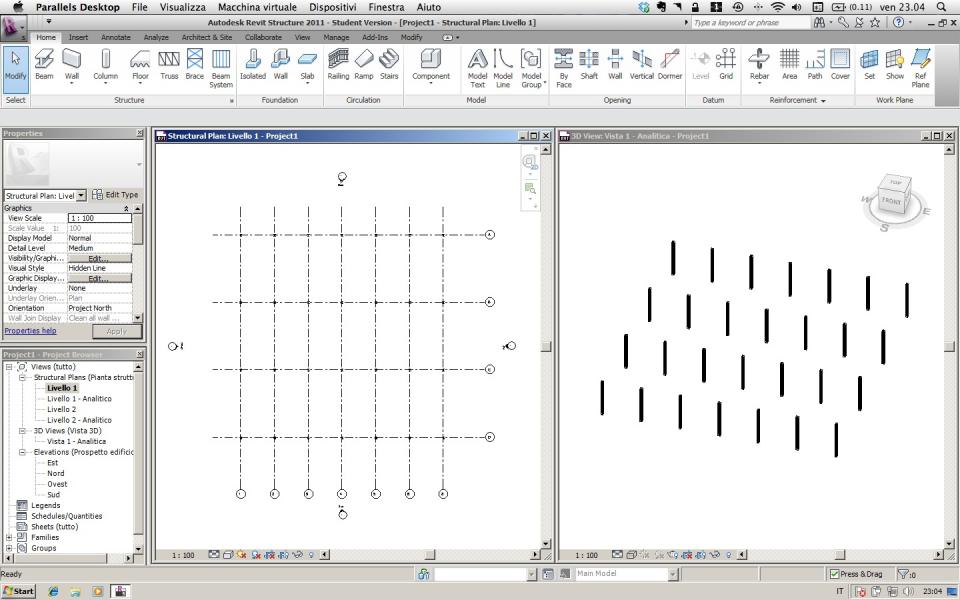
Creiamo un nuovo progetto (in questo caso una "pilastrata") con REVITs. Non ci preoccupiamo della povertà di questo modello in quanto ci interessa, come primo passo, capire come avviene l'inserimento di questo all'interno di ROBOT.
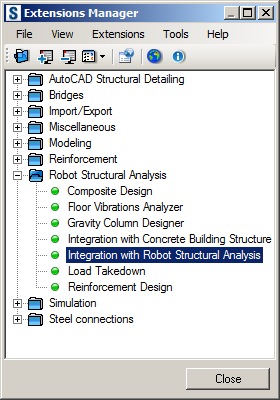
Tra le voci di REVITs cerchiamo sotto Add-Ins il comando Extensions Manager (per trovare la voce in questione bisogna scaricare l'estensione per REVIT ed installarla), tra le cui voci possiamo far partire l'integrazione con ROBOT Structural Analisys.

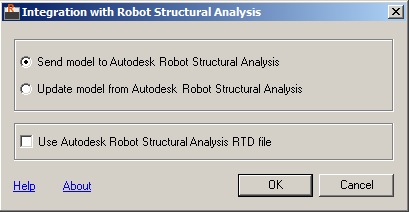
A questo punto ci viene fornita la possibilità di inviare il nostro modello a ROBOT o di caricarlo da questo, ma avendo modellato a partire da REVIT selezioniamo la prima opzione.
La terza opzione consente di trasferire i dati ad un file separato di ROBOT, così che possiamo continuare a lavorare al modello simultaneamente sui due programmi. Se questa non dovesse essere selezionata verrà creato un nuovo file di ROBOT: questa soluzione è consigliata per una analisi veloce di controllo o per prendere singole decisioni. La scelta sarà sempre influenzata dal nostro medoto di lavoro e dal tipo di contollo che abbiamo sul modello.
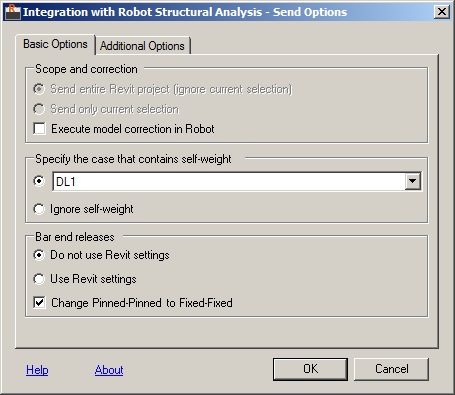
Ci sono delle opzioni base da considerare quando inviamo il nostro modello.
Scope and correction - Possiamo infatti scegliere se inviare l'intero modello o se selezionare una porzione di questo, ovviamente nel caso volessimo dare vita ad un analisi o riprogettare determinati elementi o sistemi strutturali. Inoltre l'esecuzione di una correzione al modello attraverso Robot, consentirà l'applicazione della procedura di correzione (di default) del programma.
Maggiori informazioni, settaggi e comportamenti riguardanti questa procedura sono rintracciabili nella guida, una volta studiata aggiungerò anche questi.
Specify the case that contains self-weight - Il "Self-weight" della struttura può essere ignorato o settato su uno dei casi da noi definito. In questo caso scegliamo il "Load Case" DL1, ma credo che questa opzione è legata alla definizione di carichi che operiamo su REVITs prima di mettere in funzione l'estensione. Per vedere come creare questi carichi vi rimando a questo tutorial.
Bar end realeses - Questo aspetto è il meno chiaro tra tutti. Si parla della lettura che il programma fa sulle "bar end releases" (estremità dei componenti comunicanti): poichè questa può essere settata per ciascun componente all'interno di REVITs, le Basic Options ci danno la possibilità di scegliere tra mantenere i settaggi del modello (impostati per default Pinned-Pinned), oppure ignorarli definendo gli aggiustamenti di tutte le (end-releases) estremità comunicanti in ROBOT.
Se decidiamo di mantenere invariati questi settaggi, una prima analisi di calcolo potrebbe rilevare, e sicuramente lo farà, numerose instabilità date da errori di calcolo.
Tra queste opzioni c'è anche la possibilità di cambiare le estremità Pinned-Pinned in Fixed-Fixed, soluzione che verrà assegnata a tutti gli estremi, compresi quelli dovuti alla nuova modellazione in ROBOT.
Ciò che veramente non è chiaro, sta nel significato che si nasconde dietro questi due termini: Pinned-Pinned, Fixed-Fixed
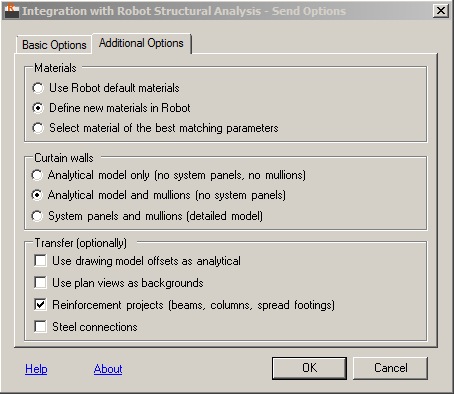
Dopo le Opzioni Base ci sono da prendere in considerazione delle Opzioni Addizionali da inviare al fine dell'integrazione.
Materials - Possiamo inviare materiali definiti in REVITs per poi farli diventare nuovi in ROBOT, oppure potremmo scegliere di utilizzare i materiali di default. Un ulteriore ipotesi consiste nel lasciare che l'estensione paragoni i materiali dei programmi selezionando quelli con il maggior numero di caratteristiche simili. Selezionando quest'opzione i materiali di REVITs vengono mantenuti nel modello ed i nuovi corrispondenti materiali sono definiti in ROBOT.
Poichè i materiali di REVITs sono caratterizzati da parametri legati a standards grafici, opzioni di rendering ed altre informazioni a questi attribuite, vi consiglio di continuare ad utilizzarli.
Curtain walls - Nel loro trasferimento a ROBOT queste vengono trasferite come "Claddings elements" (elementi di rivestimento) piuttosto che elementi finiti, così da assegnare aree di carico e direzioni delle campate.
Transfer (optionally) - Trasferendo il modello utilizzando "drawing model offsets" avremo maggiore controllo sulla posizione di determinati elementi. Questa opzione risulterà utile quando un particolare allineamento della geometria risulterà importante per l'analisi almeno quanto la documentazione.
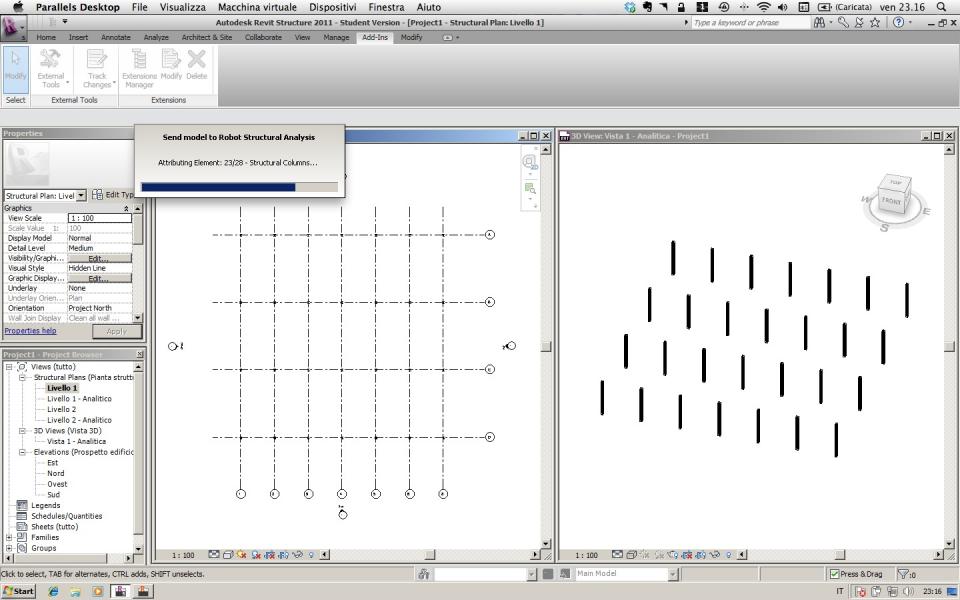
Dopo aver calibrato le opzioni a seconda di ciò che ci interessa studiare, premiamo OK e il modello viene inviato a ROBOT in pochi minuti.
Questo comando, una volta completato con successo, ci da la possibilità di vedere una piccola relazione sui passaggi effettuati durante l'integrazione tra i due programmi.
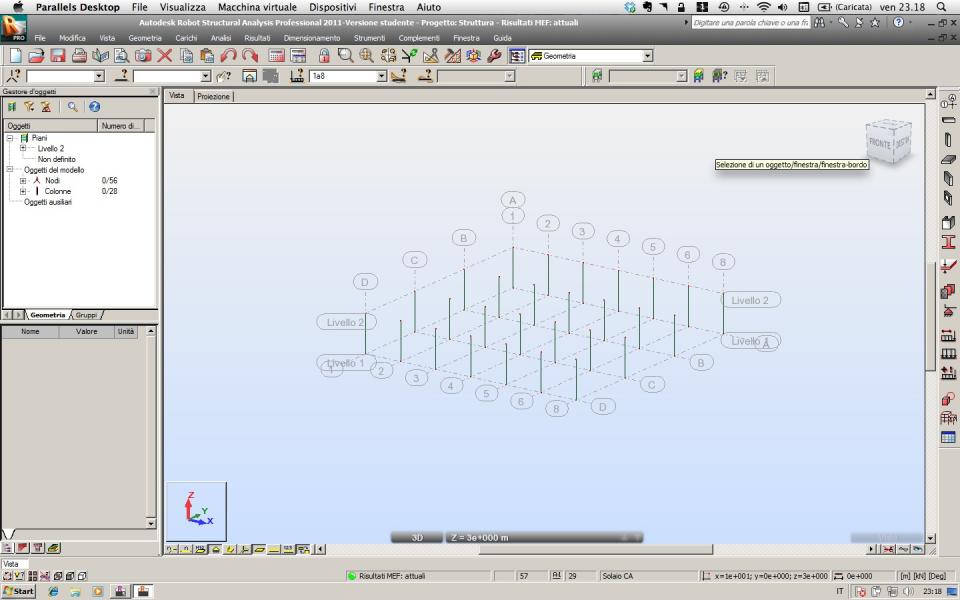
La schermata di Robot Structural Analysis Professional 2011. Ed il nostro modello, pronto ad essere analizzato.