Facoltà di Architettura - Università degli Studi Roma Tre
Es6_Controventi e ripartizione forze sismiche
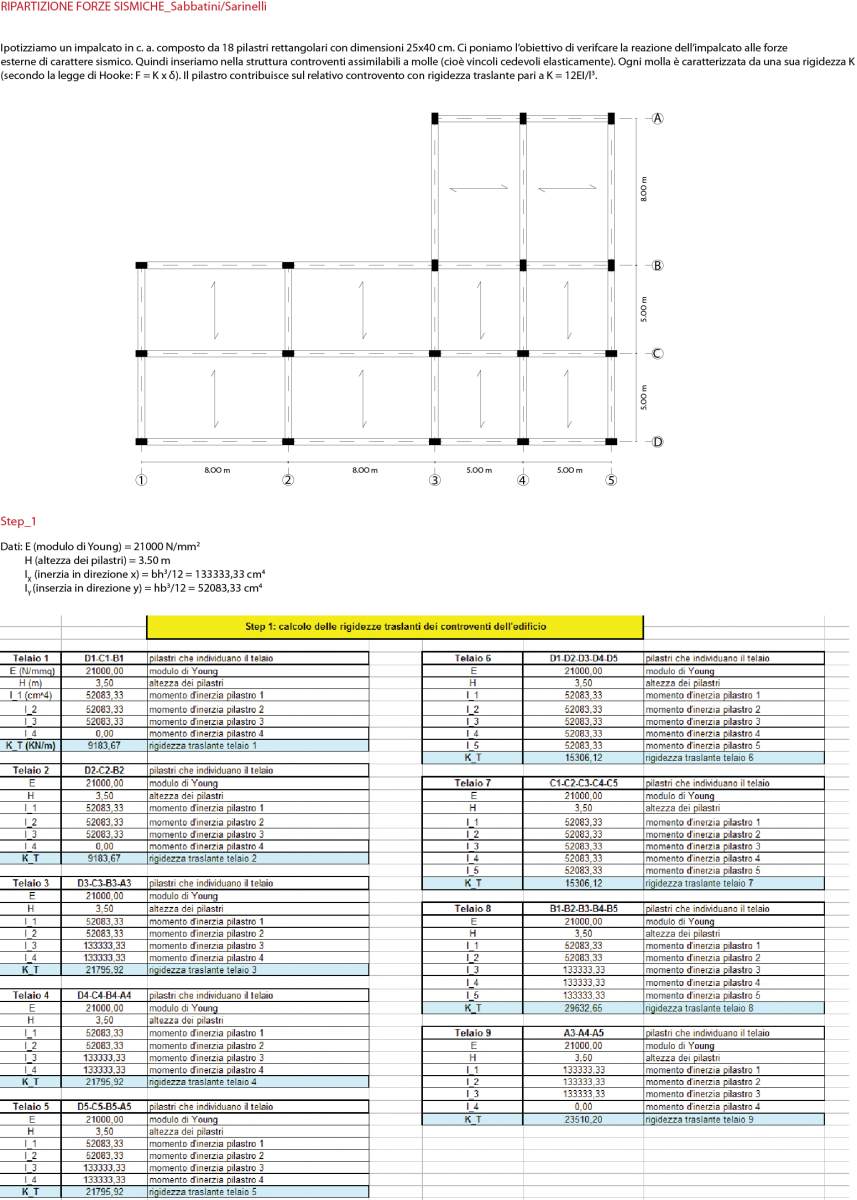
Controventi
Un impalcato, composto da tutti gli elementi orizzontali del telaio, è rigido nel suo piano e flessibile fuori dal piano.
Quindi le forze esterne agenti su di esso tendono a spostarlo e per contrastarle si utilizzano i controventi, elementi
elastici in grado di resistere all’azione delle forze orizzontali (sisma/vento).
Caso1
Consideriamo un impalcato con una forza F applicata. I controventi possiamo assimilarli a due molle (vincoli cedevoli)
entrambe aventi rigidezza pari a k.
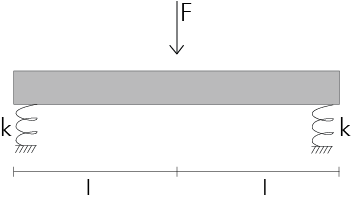
Essendo il sistema isostatico, posso facilmente conoscere le reazioni delle due molle, le quali generano anche una forza
uguale e opposta che provocherà un accorciamento (δsarà uguale perché le molle hanno la stessa rigidezza).
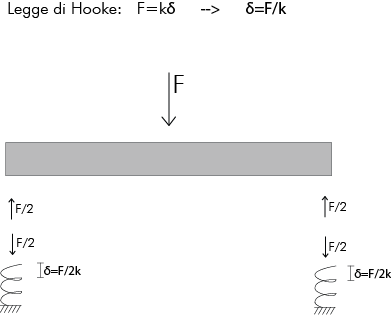
Quindi il corpo trasla di una quantitàche sarà pari a δ=F/2k
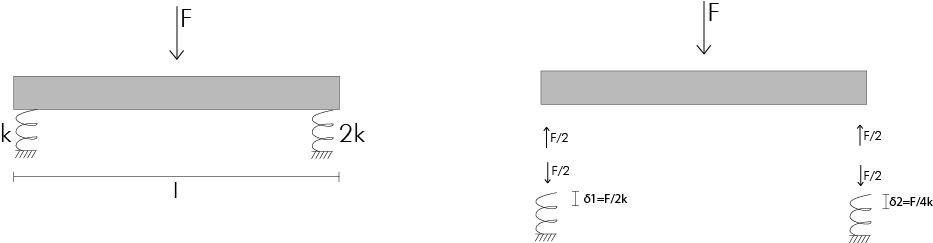
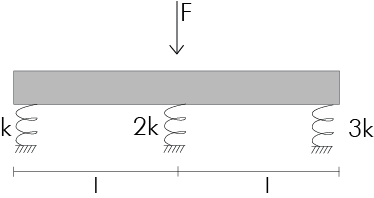
Caso 2
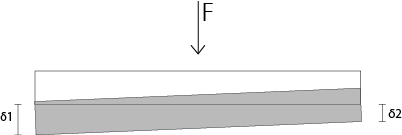
Ora considero lo stesso sistema isostatico precedente, ma con due molle aventi rigidezze diverse. Quindi la forza che
reagisce sul sistema provocherà due abbassamenti diversi a destra e a sinistra (il corpo ruota rigidamente).
Ora ipotizzo che il sistema non ruoti, ma trasli di δ. In questo modo analizzo le reazioni vincolari e trovo il loro asse centrale.
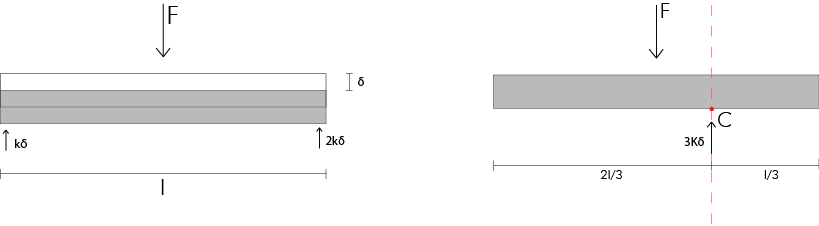
Dato che la forza F non coincide con l’asse delle rigidezze, il sistema tenderà a ruotare intorno al punto C.
Caso 3
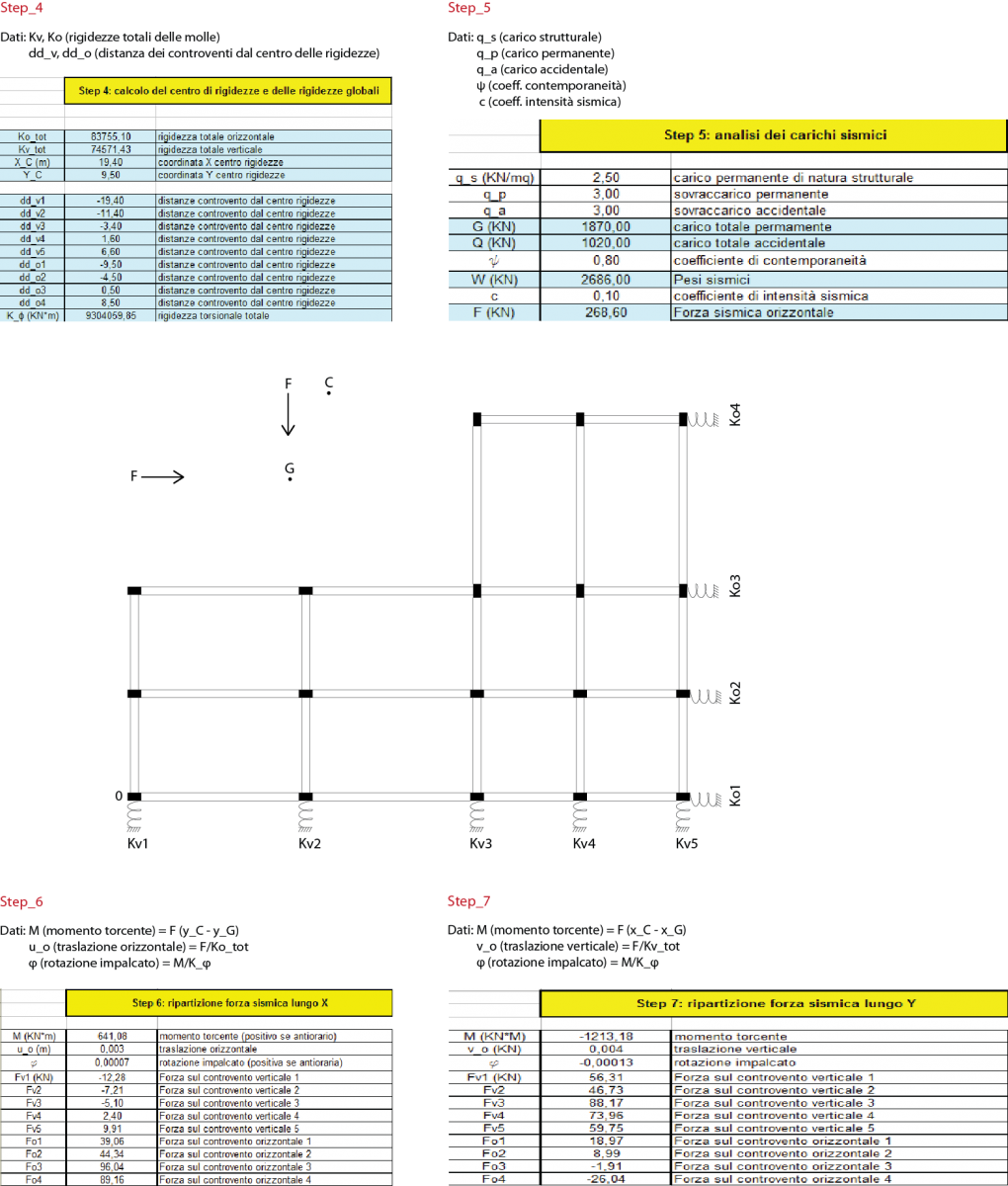
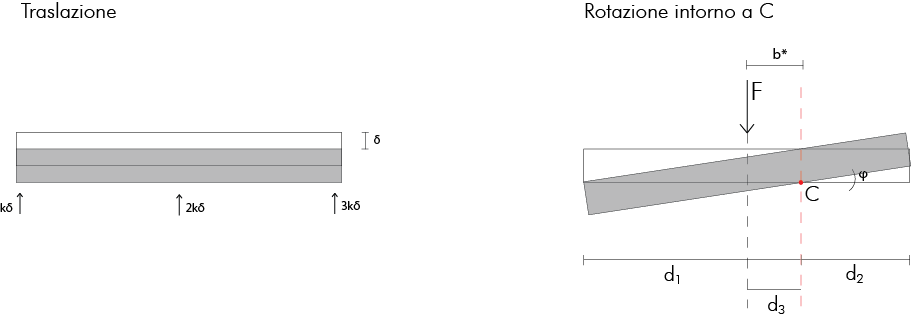
Nel caso di un sistema iperstatico, vedo i parametri di spostamento δ e φ come le mie incognite.
Per determinare il loro valore utilizzo le tre equazioni di equilibrio alla traslazione e alla rotazione del corpo rigido.
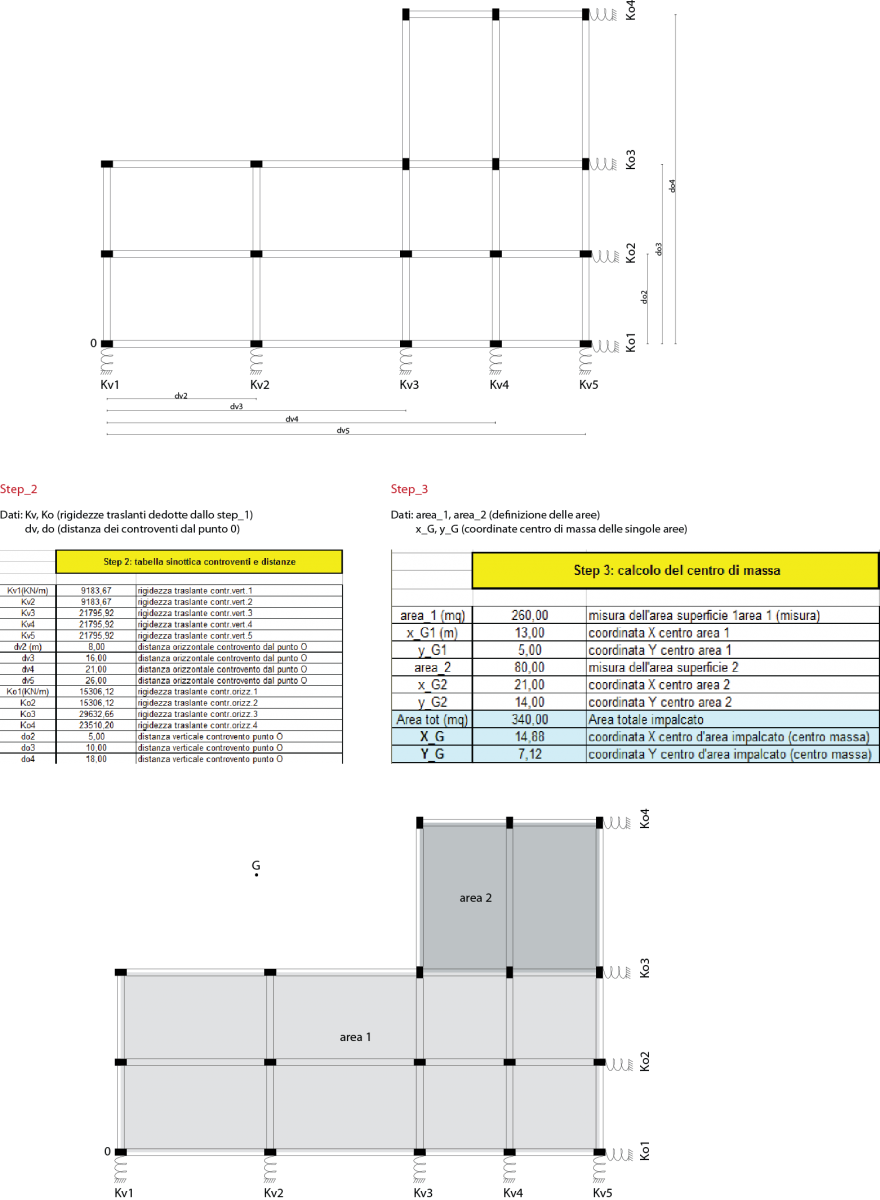
Cerco quindi il centro di queste forze:
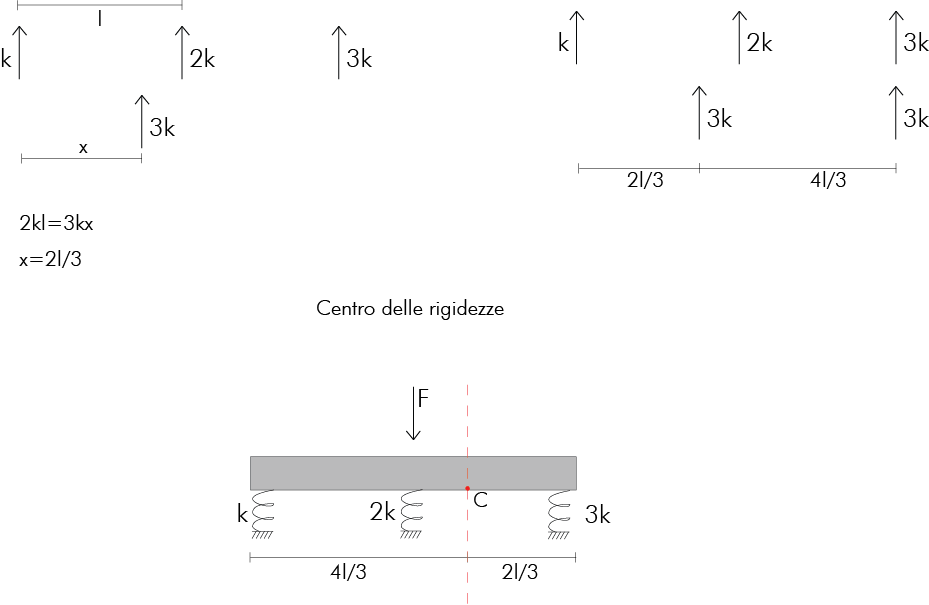
Importanti sono le distanze delle molle dal centro, perché è da questo che dipendo il loro
accorciamento o allungamento:

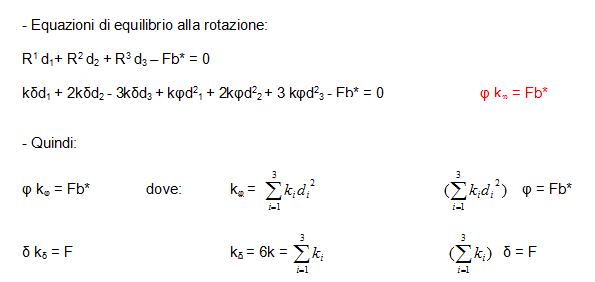
- Equazioni di equilibrio alla traslazione:
R1 = kδ + kφd1
R2 = 2kδ + 2kφd2
R3 = 3kδ - 3kφd3
R1 + R2 + R3 = F kδ + kφd1 + 2kδ + 2kφd2 + 3kδ - 3kφd3 = F
6kδ + kφ ( d1 + 2d2 - 3d3 ) = F 6kδ = F δ kδ = F
(Più grande è la forza, più grande sarà la rotazione dell’impalcato)
Dopo aver risolto rotazione e traslazione posso quindi trovare le reazioni iniziali R1, R2, R3
δ = F/ kδ
φ = Fb*/ kφ