Facoltà di Architettura - Università degli Studi Roma Tre
ESECITAZIONE 5_RIPARTIZIONE FORZE SISMICHE
La quinta esercitazione consiste nel calcolo della ripartizione di una forza orizzontale (sismica o del vento) agente su una struttura a telai Shear-Type in cemento armato utilizzando il metodo delle rigidezze.
La struttura presa in analisi è caratterizzata da 3 telai orizzontali e 4 telai verticali e i pilastri sono di dimensioni 30x50cm, di altezza 3,50m.
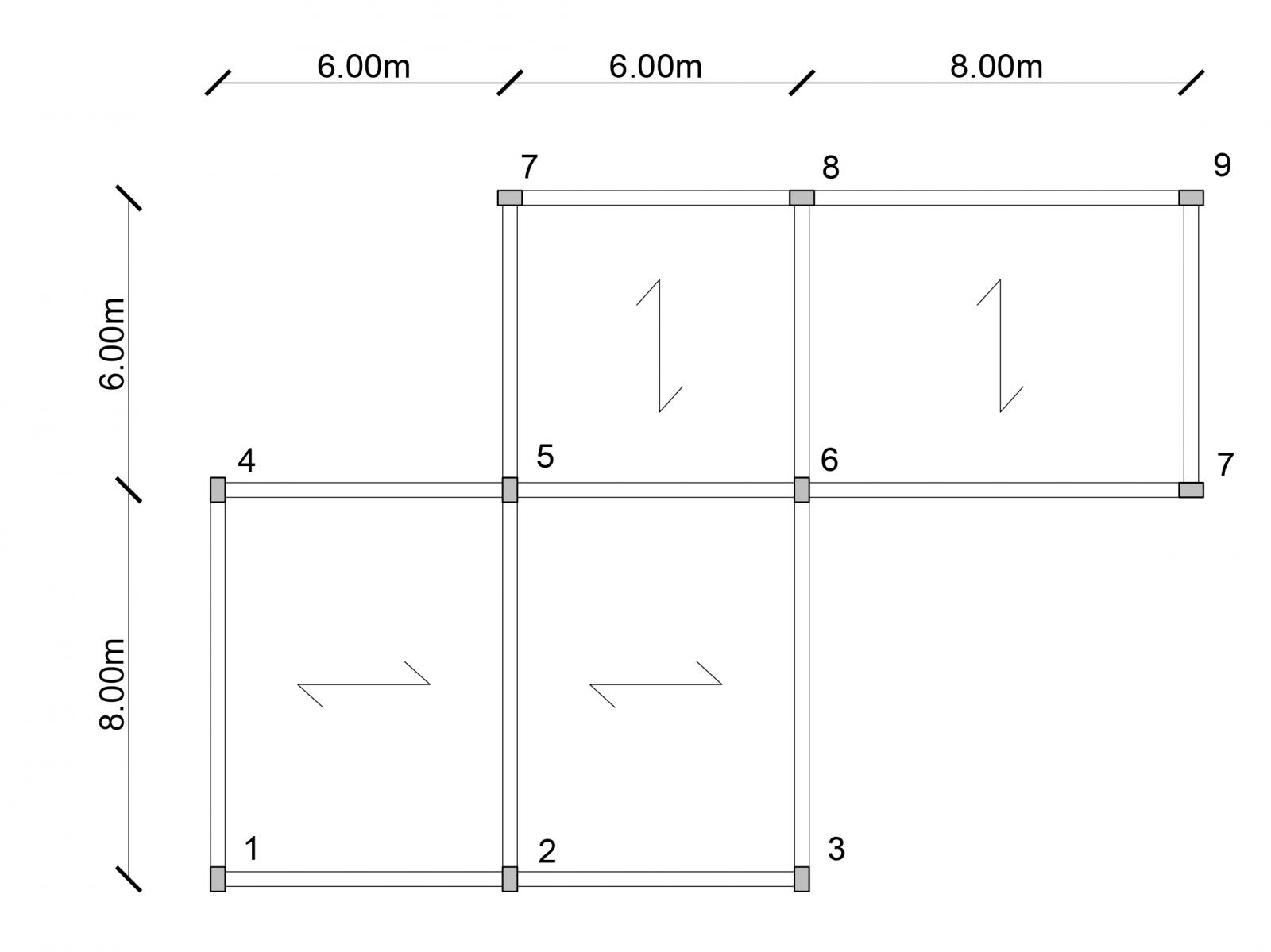
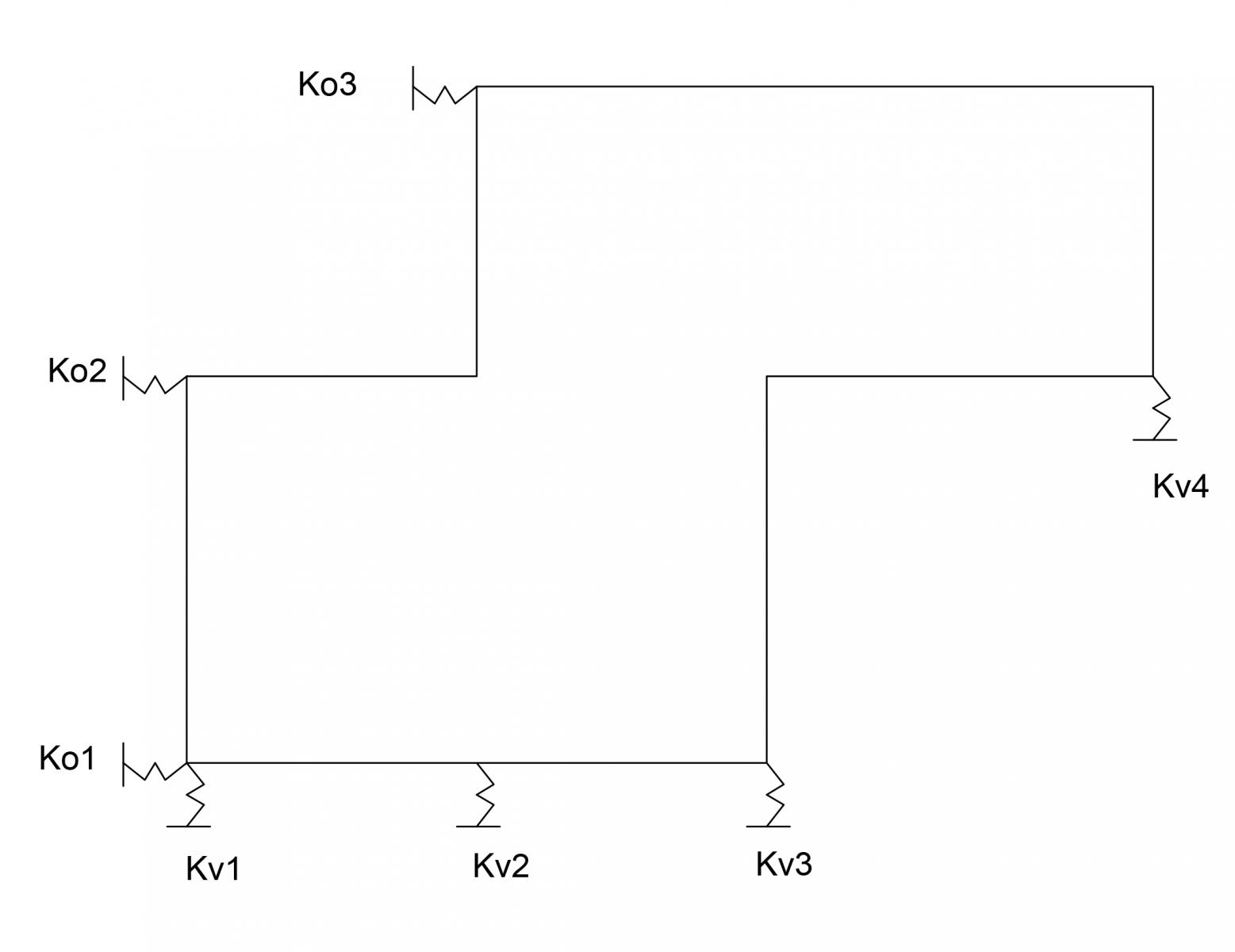
I controventi sono per il solaio vincoli cedevoli elasticamente quindi vengono rappresentati nel piano dell’impalcato come molle di adeguata rigidezza.
STEP1
Poichè i telai sono modellizzati come degli Shear-Type sappiamo che ogni ritto contribuirà alla rigidezza traslante con un contributo di 12EI/h³.
K=(12EI1)/ h³ + (12EI2) h³+ … + (12EIn)/h³
Quindi per calcolare la rigidezza traslante di ogni controvento sarà necessario inserire nel foglio excel il modulo di Young proprio del materiale(E), l’altezza dei pilastri (h) e il loro modulo d’inerzia (I):
Imax=bh³/12=(30cm)*(50cm)³/12= 312500cm⁴
Imin= hb³/12=(50cm)*(30cm)³/12= 112500cm⁴

STEP2
In questo step vengono calcolate le distanze dei controventi dal punto O, origine del sistema di riferimento.


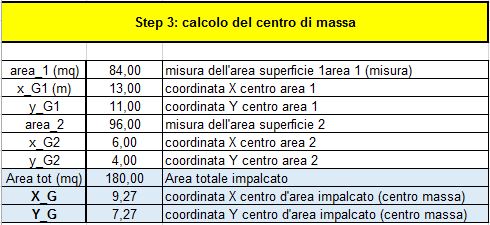
STEP3
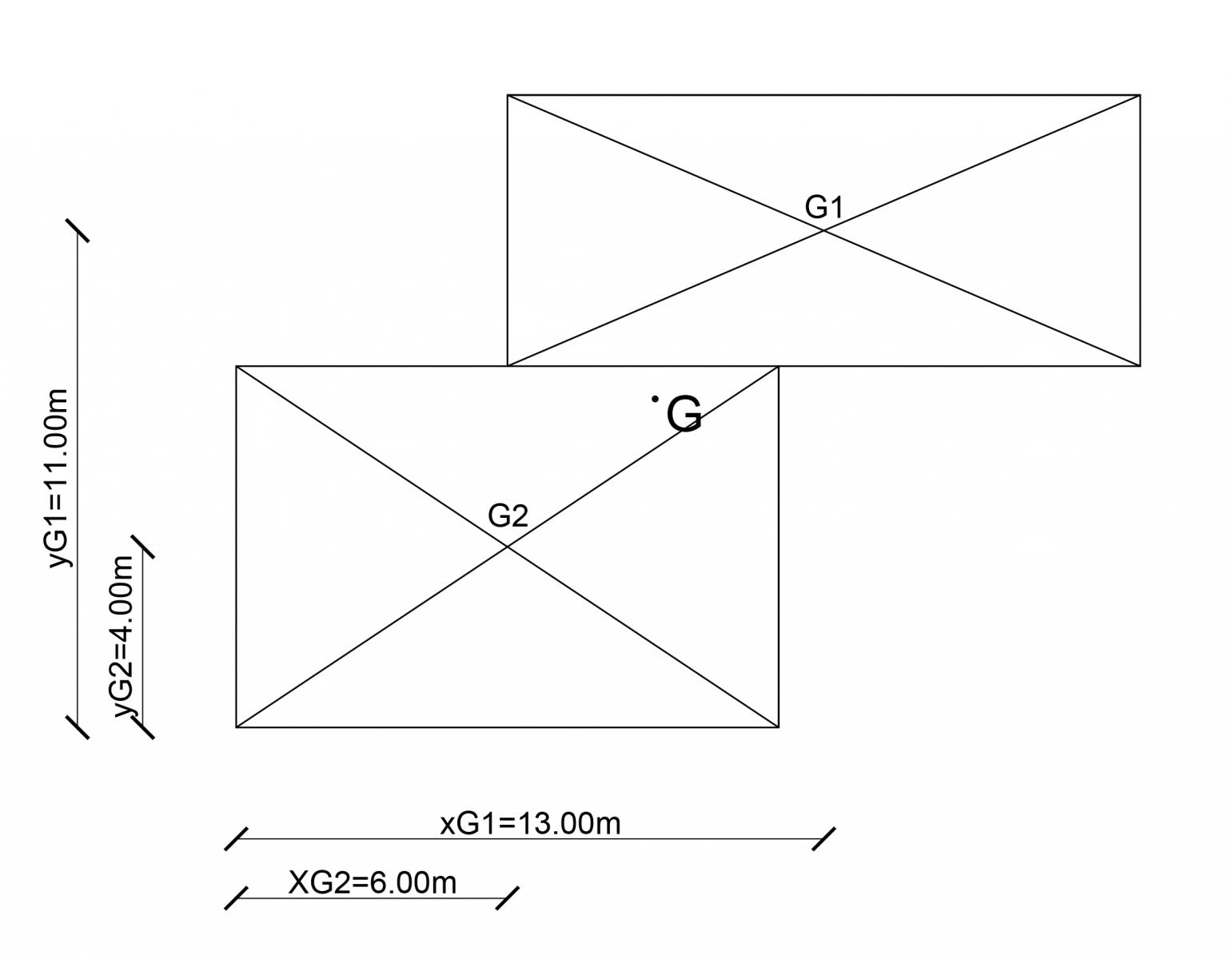
Per il calcolo del centro di massa è necessario suddividere l’impalcato in figure elementari, calcolare le rispettive aree e individuare le coordinate del loro centro geometrico. Dunque sarà possibile calcolare il centro di massa (che nel caso di un impalcato con densità di massa uniforme coincide con il centro d’area)
XG = [(A1 * xG1)+(A2 * xG2)]/Atot
YG = [(A1 * yG1)+(A2 * yG2)]/Atot
STEP4
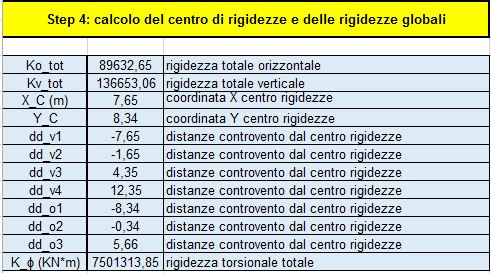
Oltre a calcolare la rigidezza totale orizzontale (kotot) e verticale(kvtot), il foglio di calcolo ricava le coordinate del centro delle rigidezze
XC = [(kv1*dv1)+ (kv2*dv2)+ (kv3*dv3)+ (kv4*dv4)]/kvtot
YC = [(ko1*do1)+ (ko2*do2)+ (ko3*do3)]/kotot
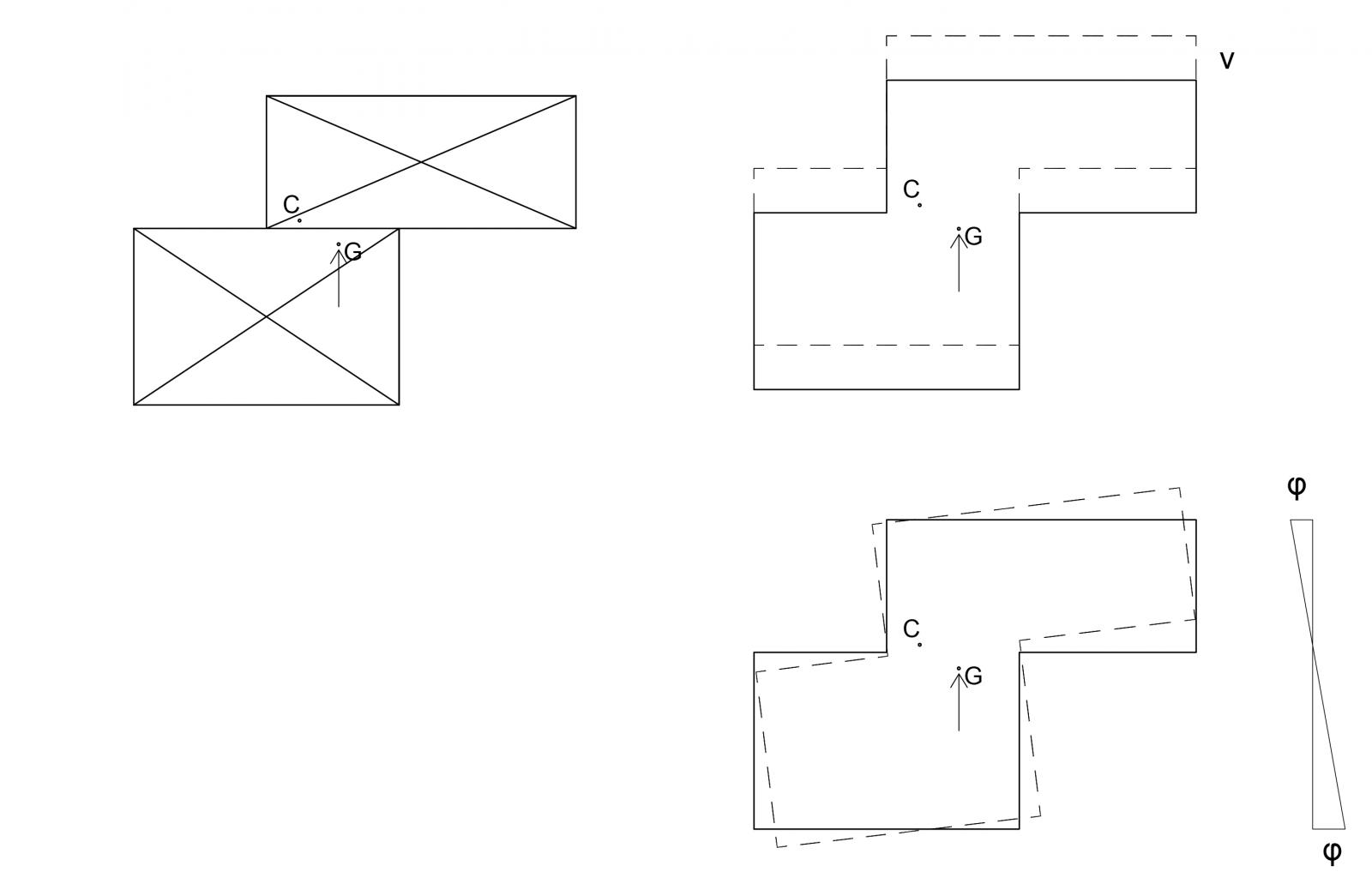
Ora è dunque possibile rappresentare nell’impalcato il centro di massa G e il centro delle rigidezze C.
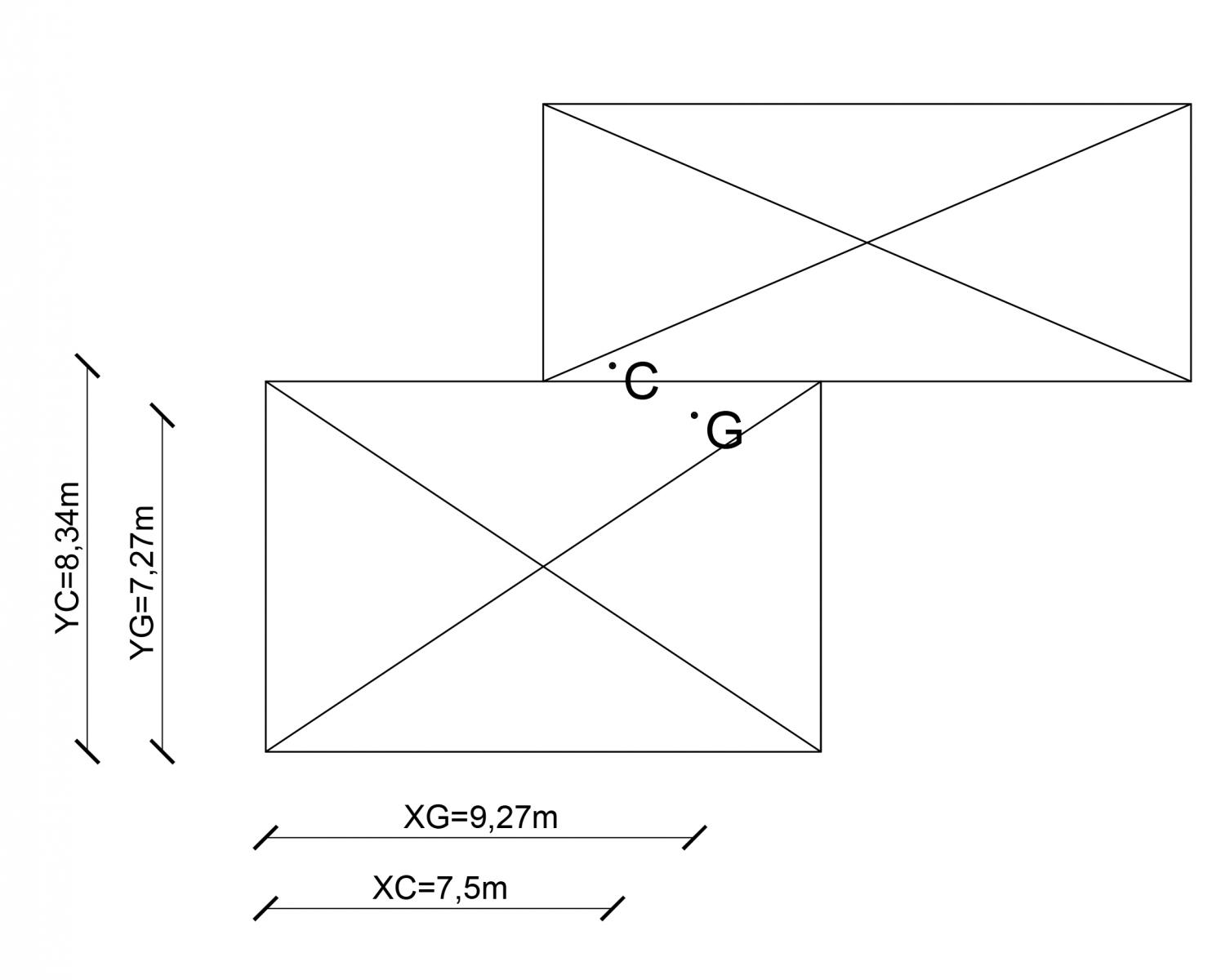
Sapendo che la forza sismica verrà applicata al centro di massa, possono essere fatte delle osservazioni.
Se la forza sismica è orizzontale allora l’impalcato trasla di una quantità u e ruota in modo antiorario.
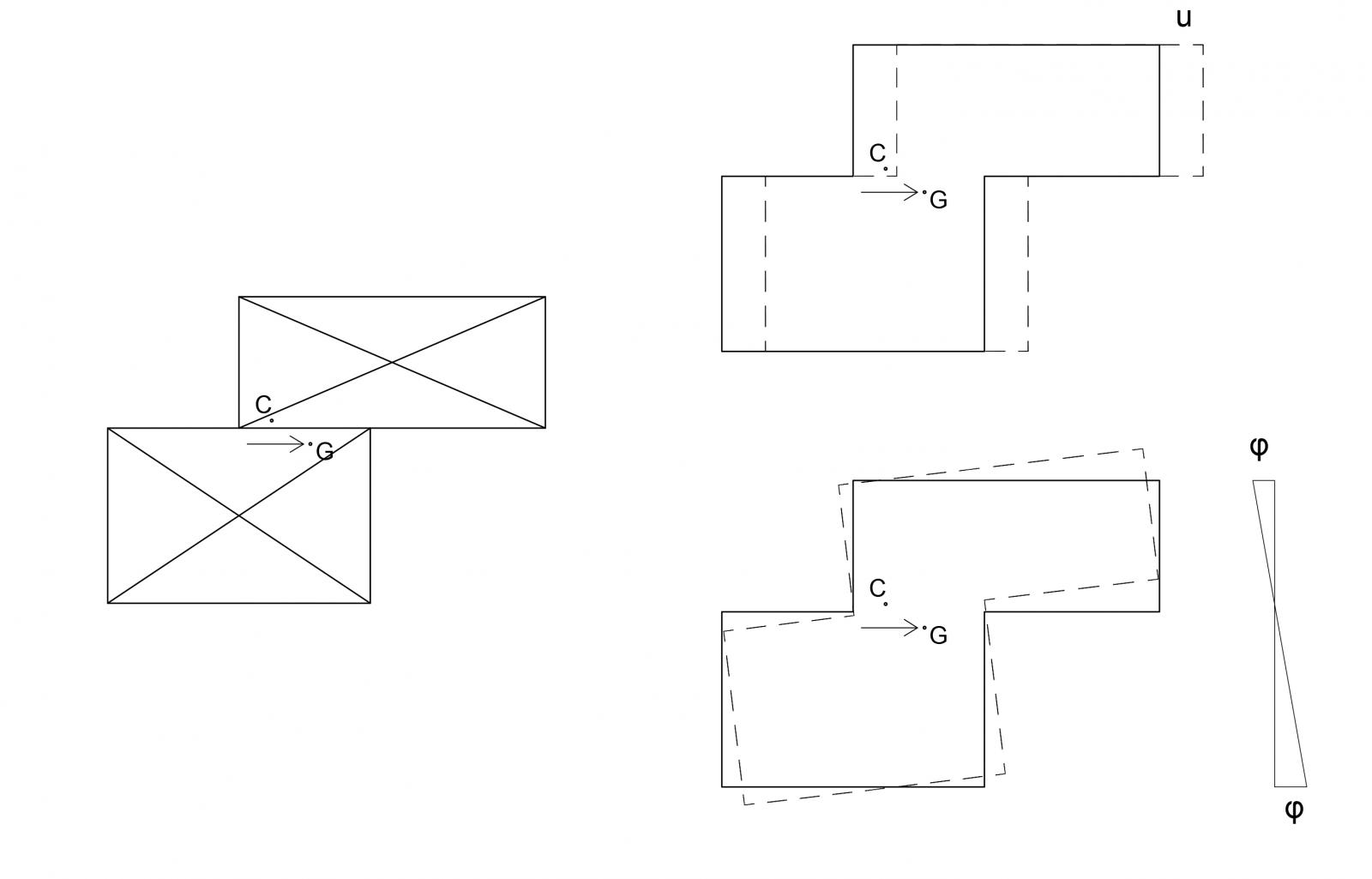
Se la forza sismica è verticale allora l’impalcato trasla di una quantita v e ruota in modo antiorario.
In questo step vengono inoltre ricalcolate le distanze dei controventi dal centro di rigidezza per ricavare la rigidezza torsionale kφ
kφ = (kv1*ddv1²)+ (kv2*ddv2²)+ (kv3*ddv3²)+ (kv4*ddv4²)+(ko1*ddo1²)+ (ko2*ddo2²)+ (ko3*ddo3²)
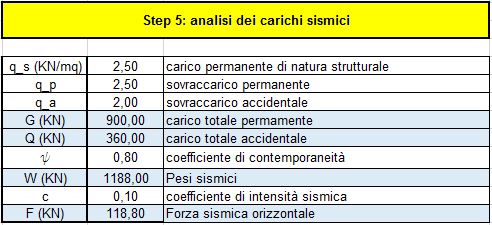
STEP5
Inserendo i valori dei carichi strutturali (qs), permanenti (qp) e accidentali (qa) è possibile ricavare il carico totale permanente (G) e il carico totale accidentale (Q)
G=(qs + qp) * Atot
Q=qa * Atot
Dunque calcoliamo il peso sismico W introducendo un coefficiente di contemporaneità ψ2j(che in ambienti residenziali è pari a 0.3).
W= G + ψ2j * Q
Introducendo un coefficiene di intensità sismica c(a Roma pari a 0,10) è possibile calcolare la forza che applicheremo al centro delle masse
F= W *c
STEP6
Oltre il calcolo della traslazione orizzontale u
u=F/ kotot
viene calcolato il momento generato dalla forza sismica
M=F* (YG-YC)
Dunque, conoscendo anche kφ, si ricava la rotazione φ
Φ = M/ kφ
Quindi è possibile capire come si ripartisce la forza sismica lungo x sui controventi.
La reazione elastica di quelli orizzontali sarà il prodotto della rigidezza traslante per la somma degli spostamenti (traslazione orizzontale e rotazione per braccio).
Fo_n= ko_n *(u + φ*dd o_n)
La reazione elastica di quelli verticali sarà il prodotto della rigidezza traslante per lo spostamento (rotazione per braccio).
Fv_n= kv_n * φ*dd v_n

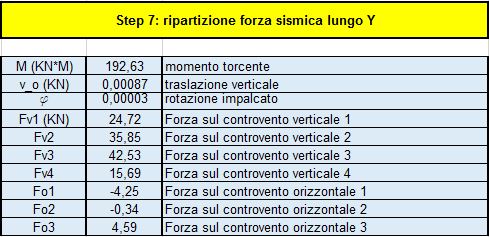
STEP7
Oltre il calcolo della traslazione verticale v
v=F/ kvtot
viene calcolato il momento generato dalla forza sismica
M=F* (XG-XC)
Dunque, conoscendo anche kφ, si ricava la rotazione φ
Φ = M/ kφ
Quindi è possibile capire come si ripartisce la forza sismica lungo y sui controventi.
La reazione elastica di quelli orizzontali sarà il prodotto della rigidezza traslante per lo spostamento (rotazione per braccio).
Fo_n= ko_n *φ*dd o_n)
La reazione elastica di quelli verticali sarà il prodotto della rigidezza traslante per la somma degli spostamenti (traslazione verticale e rotazione per braccio).
Fv_n= kv_n * (v + φ*dd v_n)