Facoltà di Architettura - Università degli Studi Roma Tre
EXE5 - Ripartizione forza sismica
Lo scopo di questa esercitazione è quello di calcolare come viene ripartita una forza orizzontale, che sia essa considerata come la forza del vento o quella di un sisma, che agisce su una stuttura in cemento armato, costituita da telai Shear-Type, attraverso il metodo delle rigidezze.

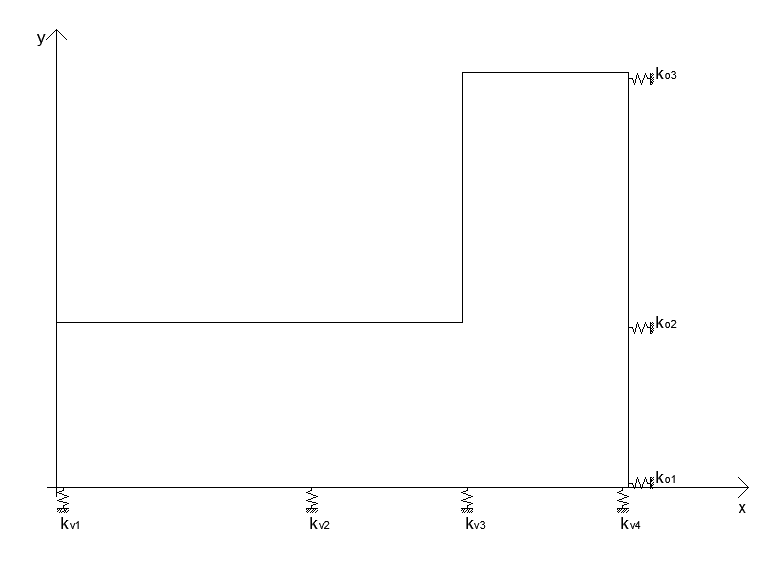
La struttura si compone di sette telai, quattro paralleli all'asse x, e tre paralleli all'asse y:
- telaio 1v pilastri 1-5
- telaio 2v pilastri 2-6
- telaio 3v pilastri 3-7-9
- telaio 4v pilastri 4-8-10
- telaio 1o pilastri 1-2-3-4
- telaio 2o pilastri 5-6-7-8
- telaio 3o pilastri 9-10
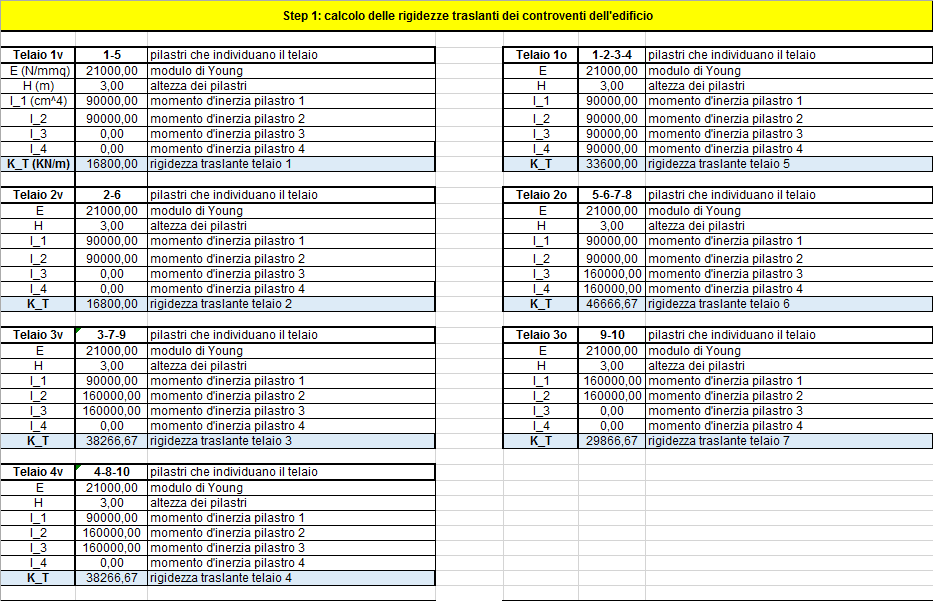
Poichè questi telai sono modellati come telai Shear-Type, è possibile calcolare la loro rigidezza in questo modo:

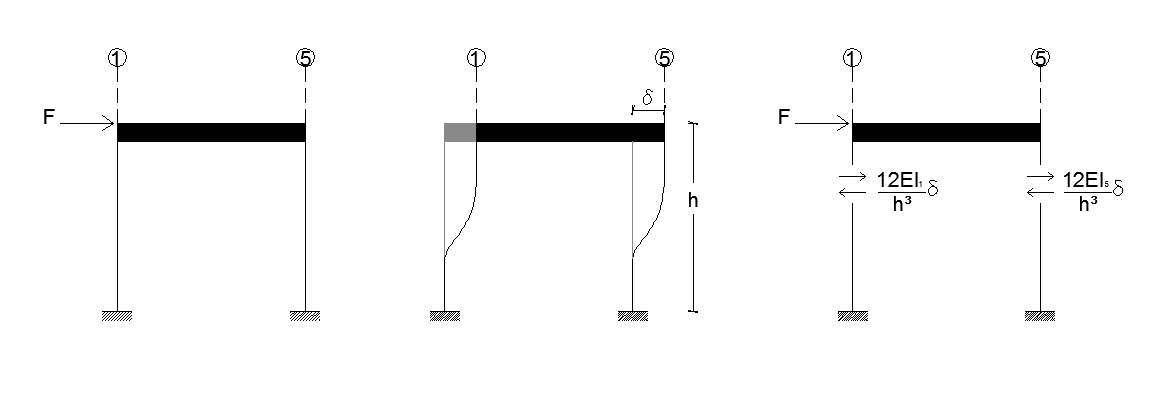
I controventi, che per il solaio rappresentano vincoli cedevoli elasticamente, possono essere schematizzati nel piano dell'impalcato come molle, aventi un’adeguata rigidezza.
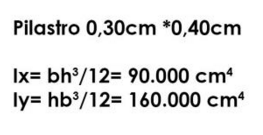
Facendo riferimento ai risultati ottenuti nella quarta esercitazione EXE4 - Dimensionamento di un pilastro, i momenti d'inerzia dei pilastri saranno i seguenti:

Nello STEP 1 del file excel viene calcolata la rigidezza traslante associata a tutti i controventi
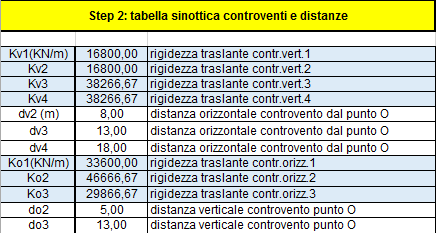
Nello STEP 2 vengono riportate tutte le rigidezze traslanti calcolate nello STEP 1, e le distanze dei controventi da un'origine arbitratria considerata come origine del sistema di riferimento O.
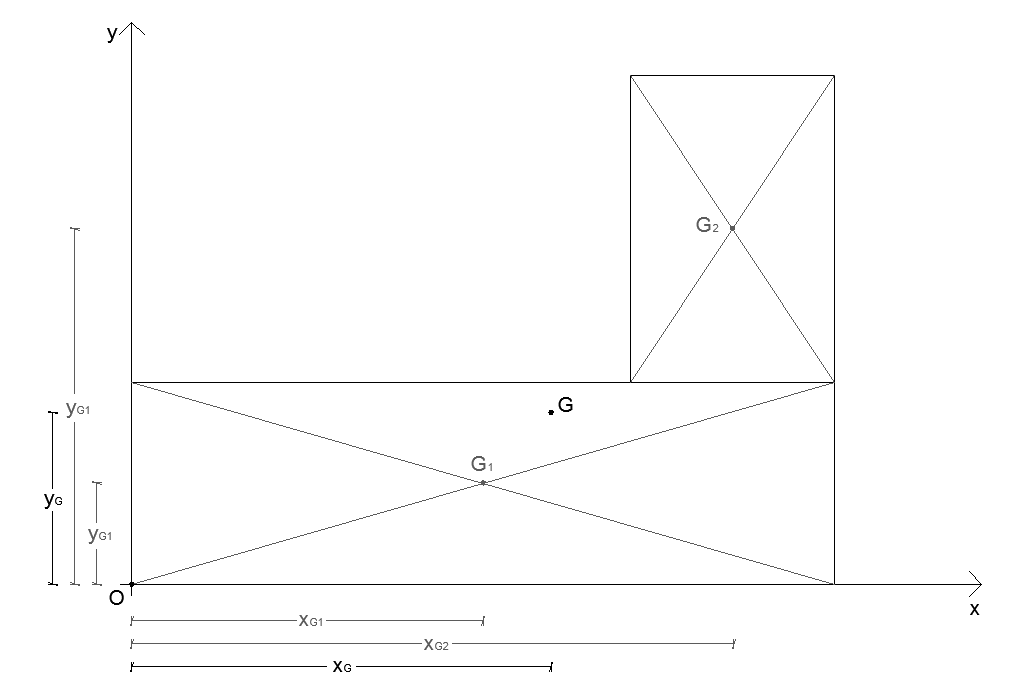
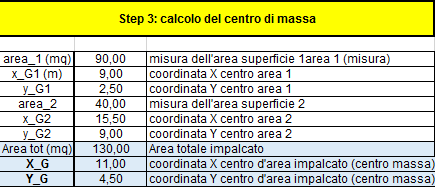
Lo STEP 3 prevede il calcolo del centro di massa che, nel caso di un impalcato con densità di massa uniforme, coincide con il centro d'area. Esso corrisponde al punto in cui verrà applicata la forza sismica.
Per rendere possibile questa operazione è necessario suddividere l'impalcato in due figure geometriche elementari, calcolarne il valore delle aree e la distanza di ognuno dei due centri d'area dall'origine O.
A questo punto, attraverso lo STEP 4, è possibile calcolare:
- le rigidezze totali, sia verticali che orizzontali;
- il centro delle rigidezze, con rispettive coordinate;
- la rigidezza torsionale, necessaria per il successivo calcolo della rotazione