Facoltà di Architettura - Università degli Studi Roma Tre
Esercitazione4_Ripartizione di una forza orizzontale
Ci proponiamo, con la seguente esercitazione, ci calcolare come viene ripartita una forza orizzontale (come ad esempio quelle derivanti dal sisma o dal vento) sui diversi telai che compongono la nostra struttura, applicando il metodo delle rigidezze per mezzo del foglio Excel da voi fornito.
Iniziamo innanzitutto disegnando la pianta strutturale dell’edificio preso come riferimento.
Prenderemo in considerazione un generico edificio ad un solo piano con struttura composta da telai piani (ossia un insieme di travi e pilastri allineati sopra un piano verticale) in cemento armato. Questi, oltre a trasmettere i carichi verticali alle fondazioni, possono svolgere anche il ruolo di controventi. E’ bene precisare che, perché un sistema di controventamento possa essere efficace, bisogna trovarsi nella situazione in cui gli impalcati possono essere considerati corpi rigidi sul proprio piano (al di quale si inflettono), per cui la forza orizzontale loro applicata tende a spostarli, ed i controventi contrastano questa azione grazie alla loro elasticità.
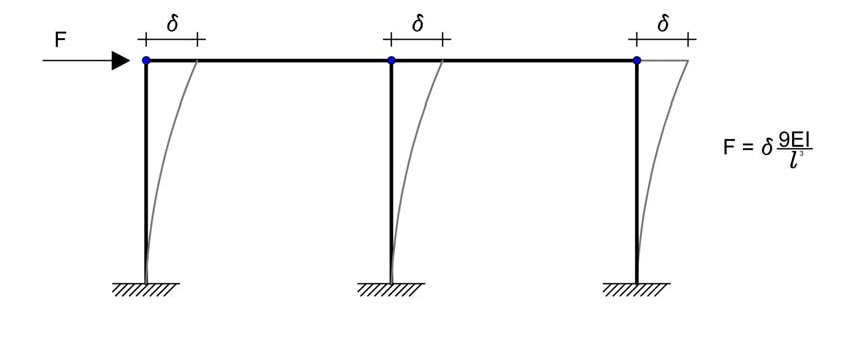
Oltre ad una specifica in termini di tecnologia utilizzata (quella del cemento armato, appunto), bisogna altresì premettere che questa esercitazione è dedicata anche ad una specifica tipologia di controventi, ossia i telai shear-type. Non essendo argomento specifico dell’esercitazione, non ci dilungheremo né sul concetto di rigidezza, né su quello di telaio shear-type. Basti ricordare che si tratta di un telaio con tutti nodi ad incastro e con la trave considerata infinitamente rigida flessionalmente rispetto ai pilastri. Confrontando un telaio di questo tipo con un altro con – ad esempio – traverso flessibile, ci rendiamo immediatamente conto della forte differenza in termini di rigidezza: il telaio shear-type è otto volte più rigido. Trattasi – ovviamente – di modelli, astratti quindi dalla realtà, ma accettati in quanto – associandoli appunto alla tecnologia del cemento armato – ne approssimano alcune caratteristiche.

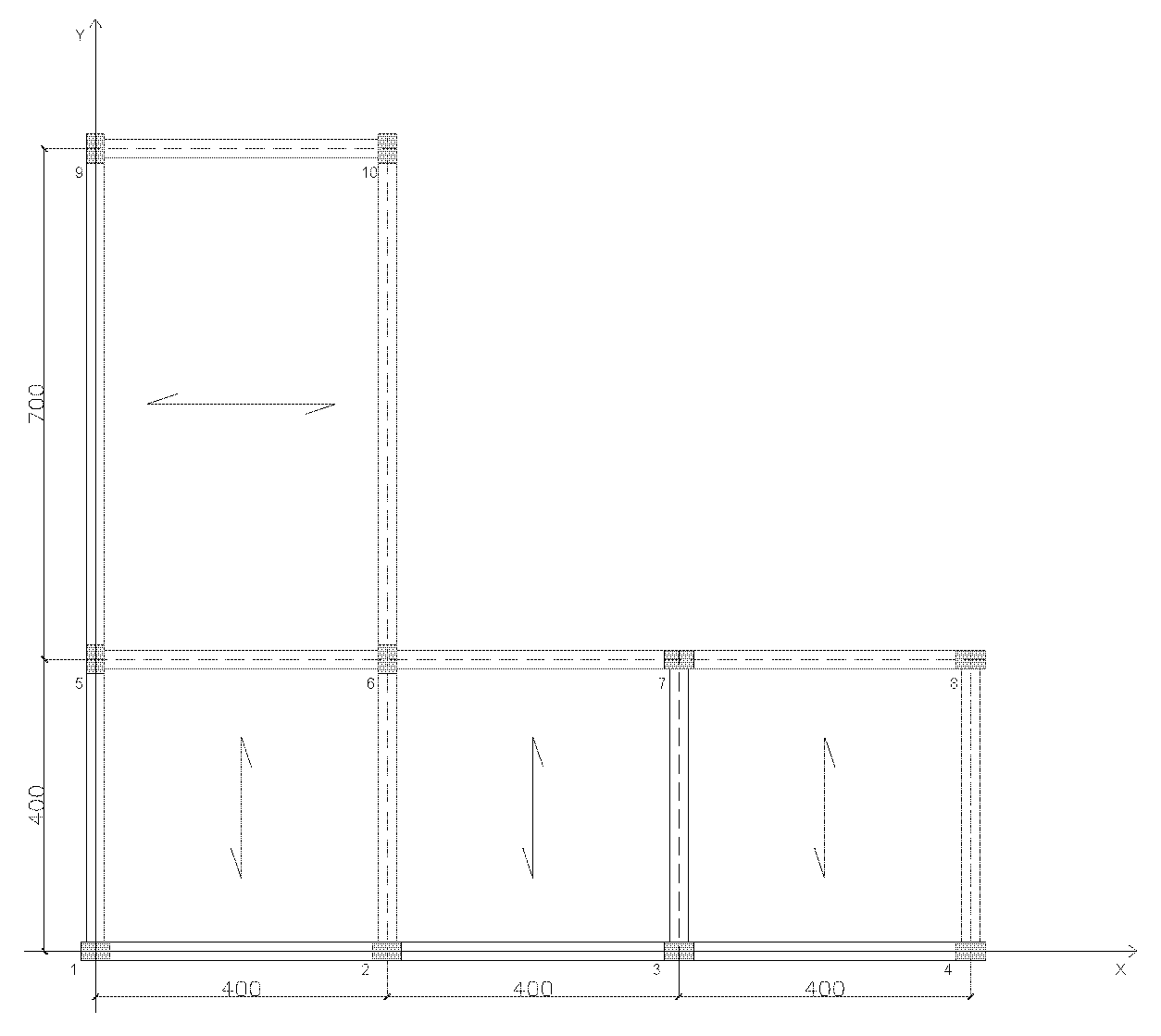
Torniamo alla nostra struttura. In pianta si possono individuare sette telai, quattro paralleli all’asse y e tre paralleli all’asse x
Telaio 1verticale, composto dai Pilastri 1,5,9
Telaio 2verticale, composto dai Pilastri 2,6,10
Telaio 3verticale, composto dai Pilastri 3,7
Telaio 4verticale, composto dai Pilastri 4,8
Telaio 1orizzontale, composto dai Pilastri 1,2,3,4
Telaio 1orizzontale, composto dai Pilastri 5,6,7,8
Telaio 1orizzontale, composto dai Pilastri 9,10
Detto ciò, cambiamo “abito mentale”, passando a vedere l’impalcato come un corpo rigido dotato di massa ed i controventi come molle che lo vincolano impedendogli di spostarsi eccessivamente. I controventi, che per il telaio rappresentano vincoli cedevoli elasticamente, possono essere schematizzati infatti come molle, aventi un’adeguata rigidezza.
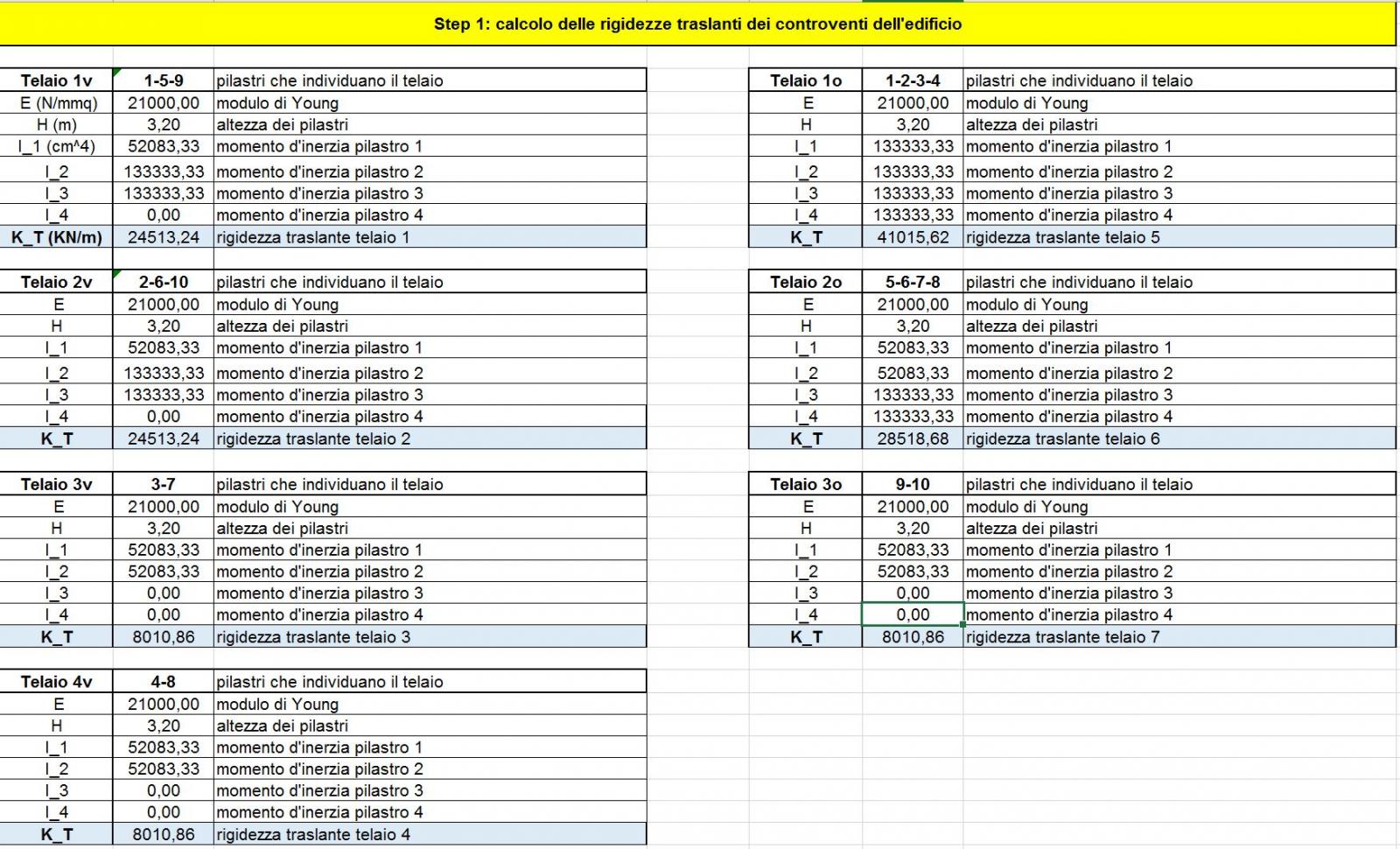
Entrando nel vivo dell’esercitazione, iniziamo calcolando le rigidezze traslanti dei controventi dell’edificio. Ipotizzando, come già accennato, che il solaio sia rigido a sufficienza da considerare la struttura composta da telai Shear-Type, possiamo passare a calcolarci la rigidezza traslante K_T (KN/m) di ogni telaio, ovvero la somma delle rigidezze dei singoli pilastri che la compongono
Ktelaio= (12E/h3) x 
Ricordandoci che il telaio di tipo Shear-Type ha una rigidezza pari a:
k= 12EI/h3
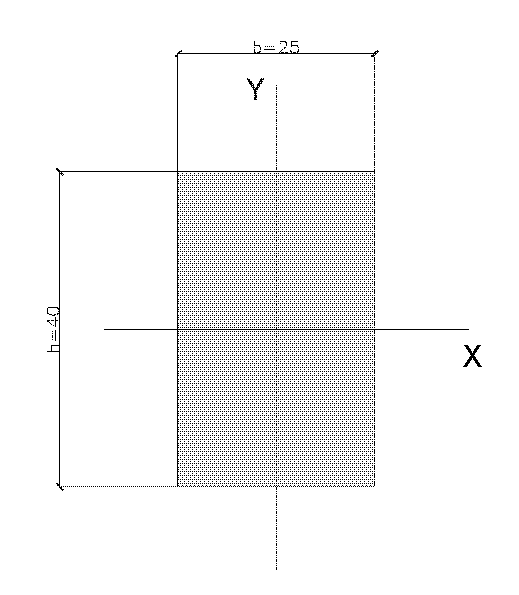
Una volta definita la nostra sezione e tenuto conto della disposizione dei pilastri in pianta, con:
E= Modulo di Young = 21000 N/mm2
H= altezza = 3,2 m
Ix= Momento d’Inerzia parallelo all’asse x = bh3/12 =
133 333,3 cm4
Iy= Momento d’inerzia parallelo all’asse y = b3h/12 =
52083,3 cm4
Avremo quindi:
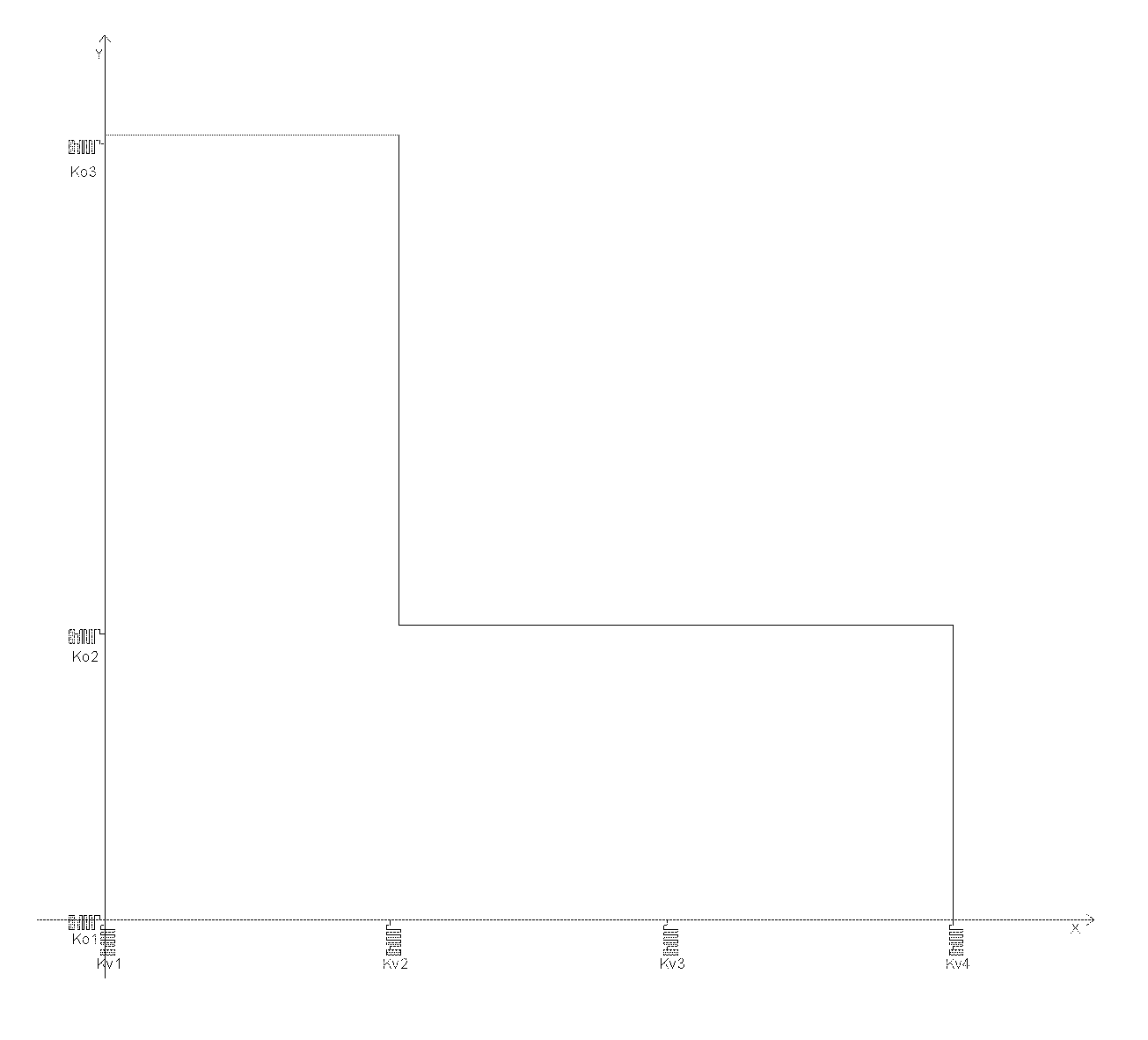
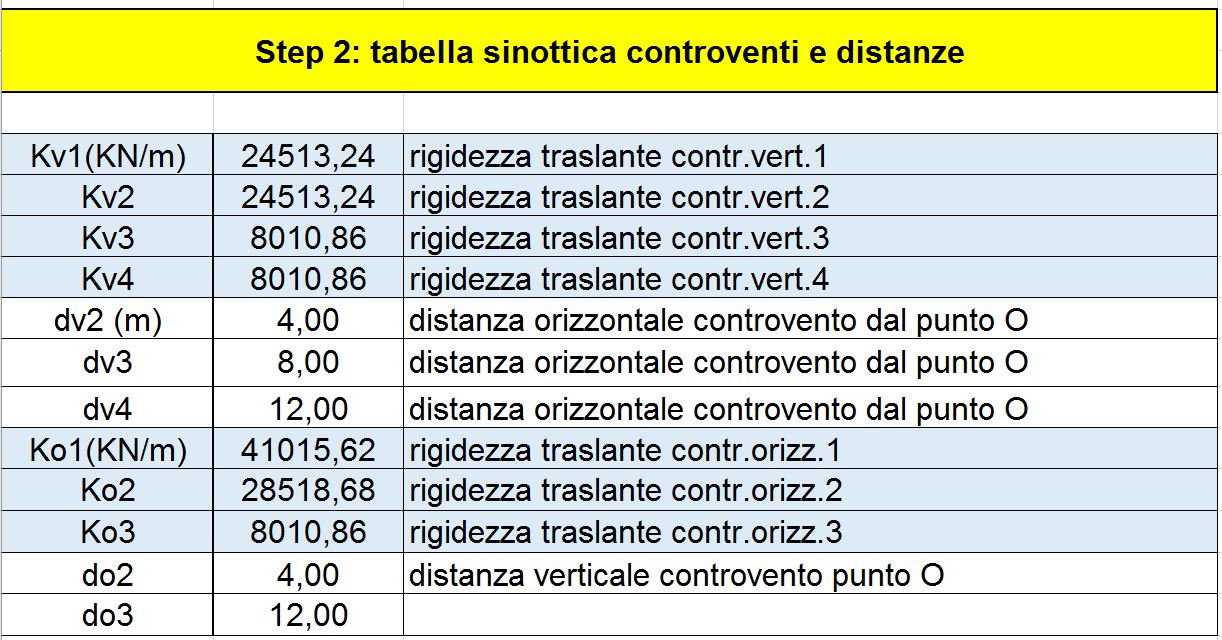
Nella tabella sinottica dei controventi e delle distanze riportata di sotto, oltre ad essere riassunte le diverse rigidezze di tutti i controventi, vengono anche riportate le distanze dei diversi controventi dal punto O, origine di un sistema di riferimento da noi scelto (a tal proposito, ci riferiamo all’immagine dell’impalcato inteso come corpo rigido dotato di massa ed i controventi come molle, dove sono riportate le distanze dei controventi dall’origine).
Passiamo quindi a calcolare il Centro di Massa ed il Centro di Rigidezza dell’impalcato. Entrambi i procedimenti sono figli dello stesso concetto base, ossia il metodo attraverso cui ottenere il centro di un sistema di vettori paralleli. Tralasciando per sinteticità dell’esercitazione la dimostrazione, basti sapere che lo stesso procedimento viene poi declinato a seconda del “centro richiesto”: nel caso del centro delle rigidezze, le variabili saranno, oltre alla rigidezza totale, la distanza dei controventi dal centro delle rigidezze; nel caso del Centro di massa (coincidente con il centro d’area, qualora la densità di massa dell’impalcato sia uniforme su tutto l’impalcato), oltre all’area, la distanza dei centri d’area delle figure geometriche elementari dall’origine del nostro sistema di riferimento.
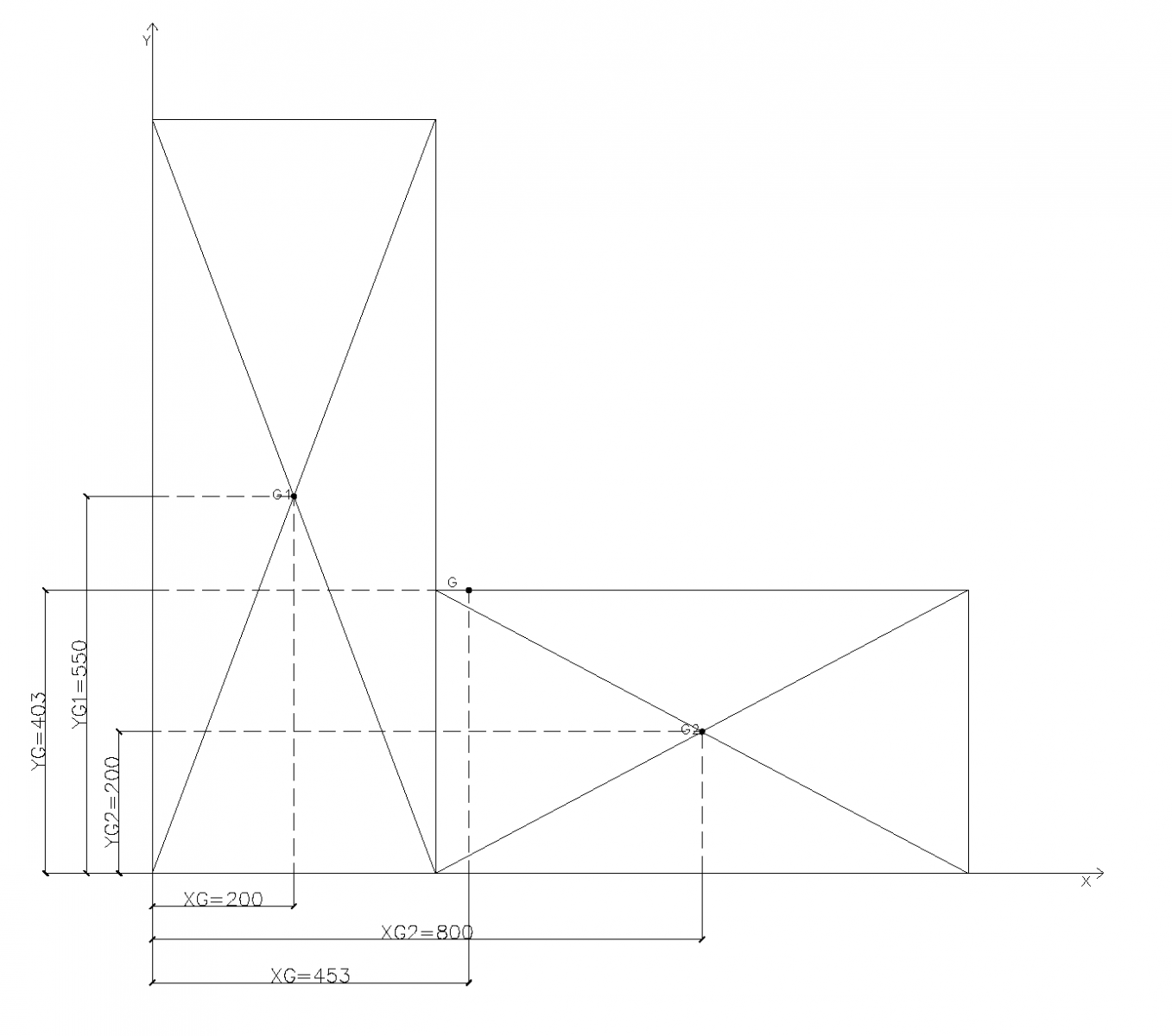
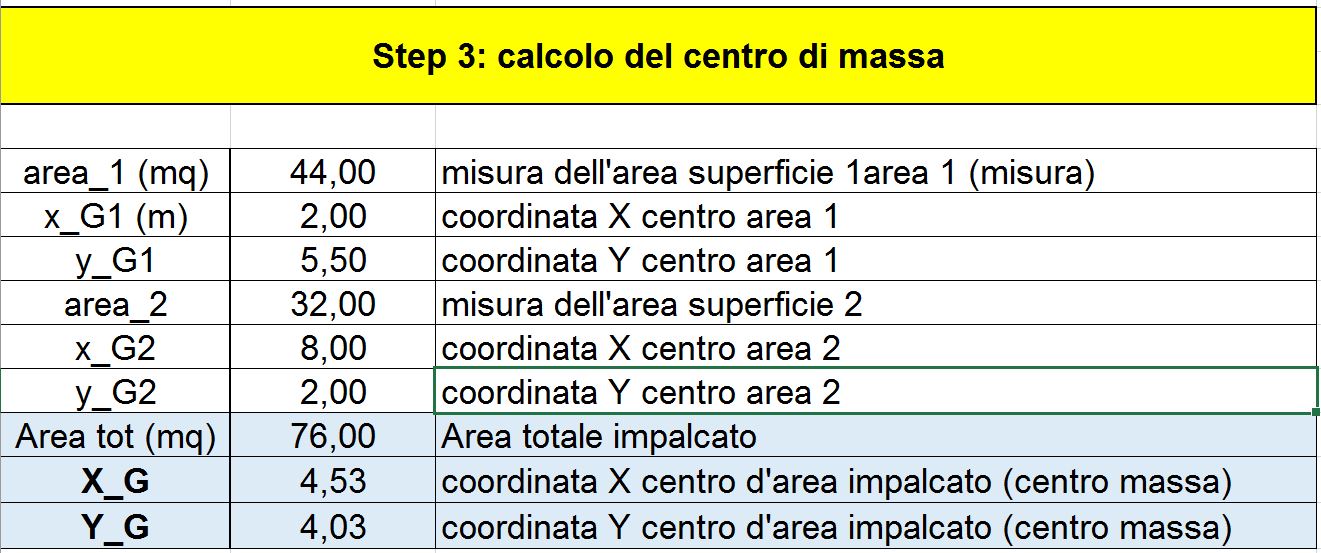
Incominciamo quindi calcolandoci quest’ultimo. Per semplicità, suddividiamo l’impalcato in due figure geometriche elementari (due rettangoli) ed indichiamo il centro di massa e l’area di ognuna di queste due figure. Ciò fatto, ipotizziamo appunto che la densità di massa dell’impalcato sia uniforme lungo tutto quest’ultimo.
Le coordinate del centro di massa saranno:
xG = (Σi=1->nAi*xGi)/ Atot
yG = (Σi=1->nAi*yGi)/ Atot
Qualora l’ipotesi di densità uniforme dell’impalcato non fosse valida, il centro di massa non coinciderebbe con il centro d’area e dovremmo quindi ricorrere alla variabile “Massa”:
xG = (Σi=1->nMi*xGi)/ Atot
yG = (Σi=1->nMi*yGi)/ Atot
Procedimento analogo per quanto riguarda il Centro delle Rigidezze dell’impalcato. Le coordinate del centro di rigidezza, formalmente analoghe alle coordinate del centro di massa, sono:
xG = (Σi=1->nKvi*Dvi)/ Kv_tot
yG = (Σi=1->nKoi*Doi)/ Ko_tot
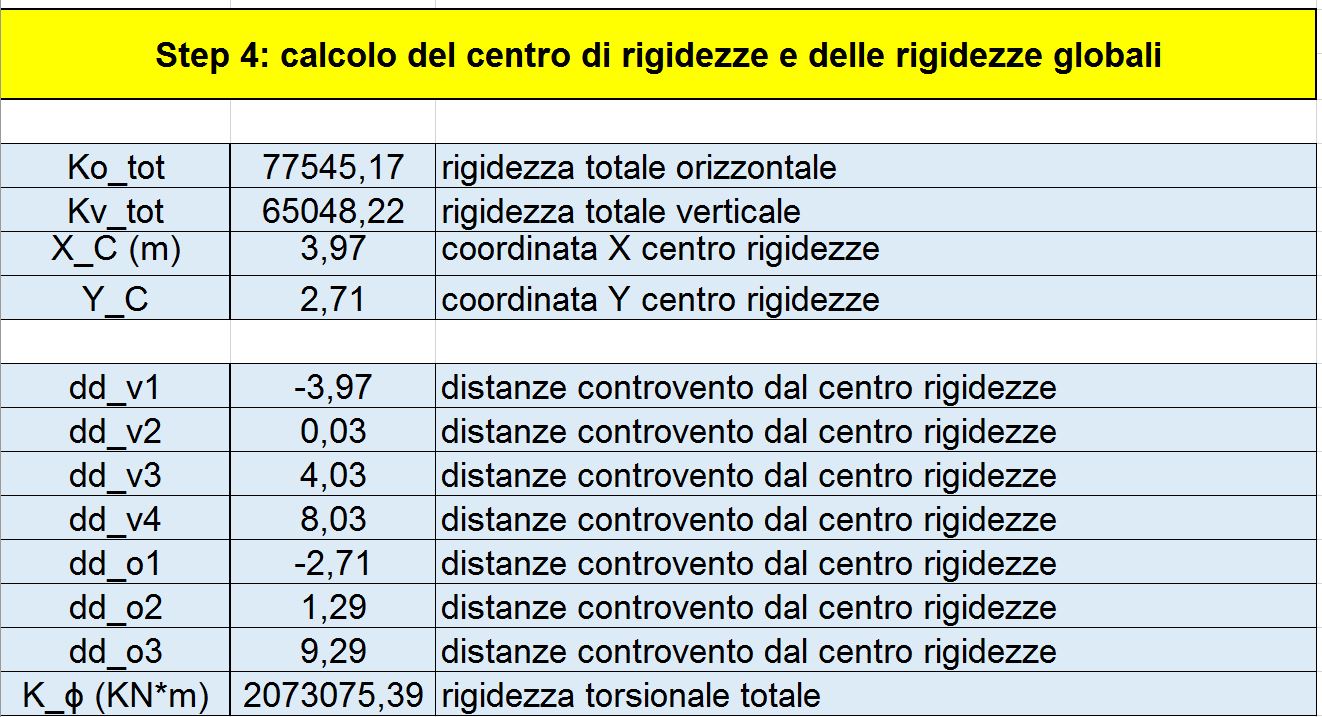
Abbiamo quindi posizionato il centro di massa ed il centro delle rigidezze all’interno del sistema di riferimento in cui abbiamo disegnato l’impalcato (ricordiamoci difatti che – ai fini di quest’esercitazione – la forza sismica viene applicata nel centro di massa G).
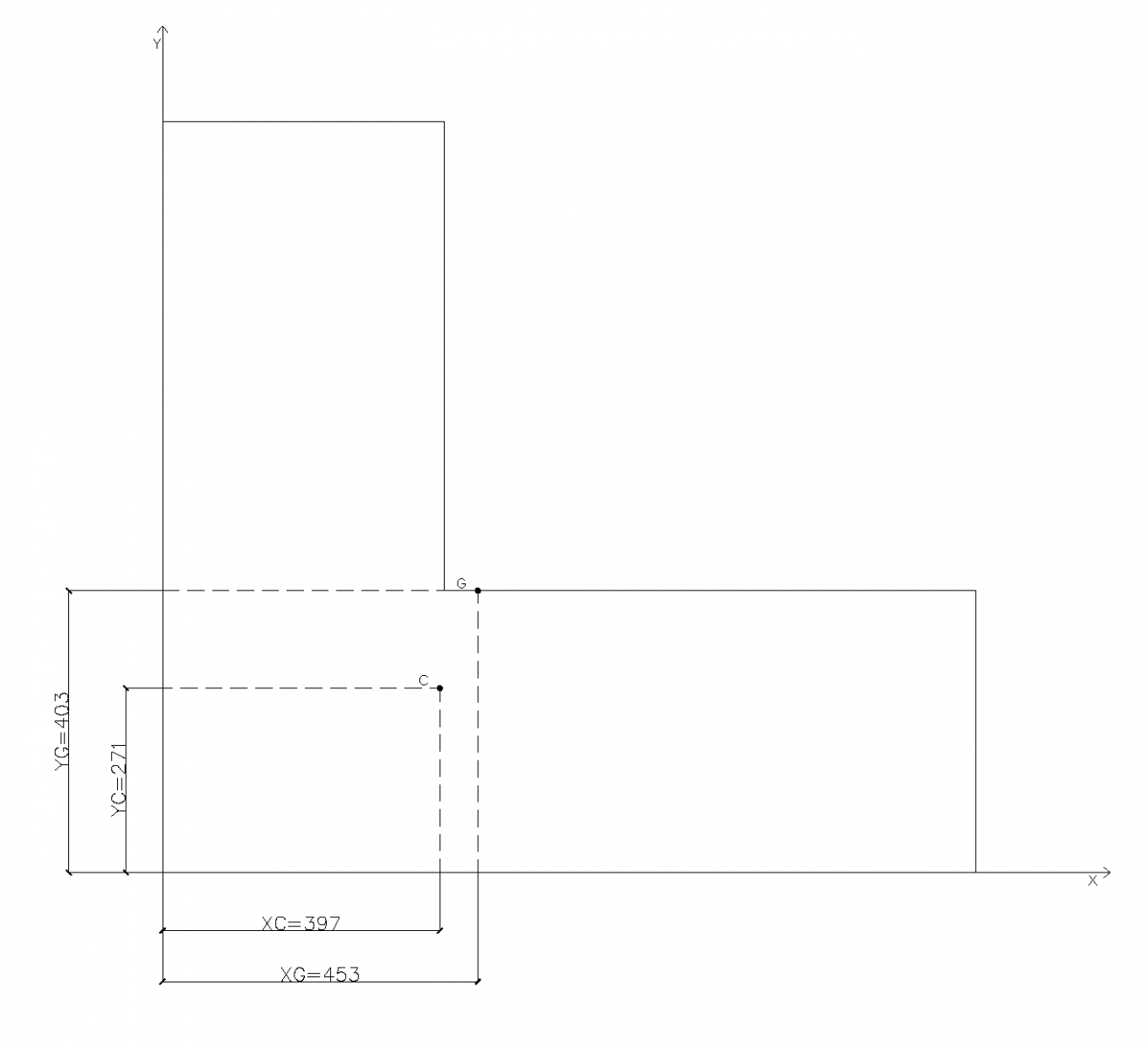
Non coincidendo i due (ossia, poiché la retta d’azione della forza esterna – applicata nel centro di massa - non passa per il centro delle rigidezze), l’impalcato è soggetto a traslazione e rotazione; si produrrà quindi uno spostamento sull’asse in cui è applicata la forza ed un momento che farà ruotare l’impalcato con perno nel centro delle rigidezze e braccio pari alla coordinata che informa sulla distanza di questa forza dal centro delle rigidezze.
Schematizzando quanto detto in maniera semplice, ci troveremo innanzi ad una situazione analoga a quanto riportato nelle due successive immagini:
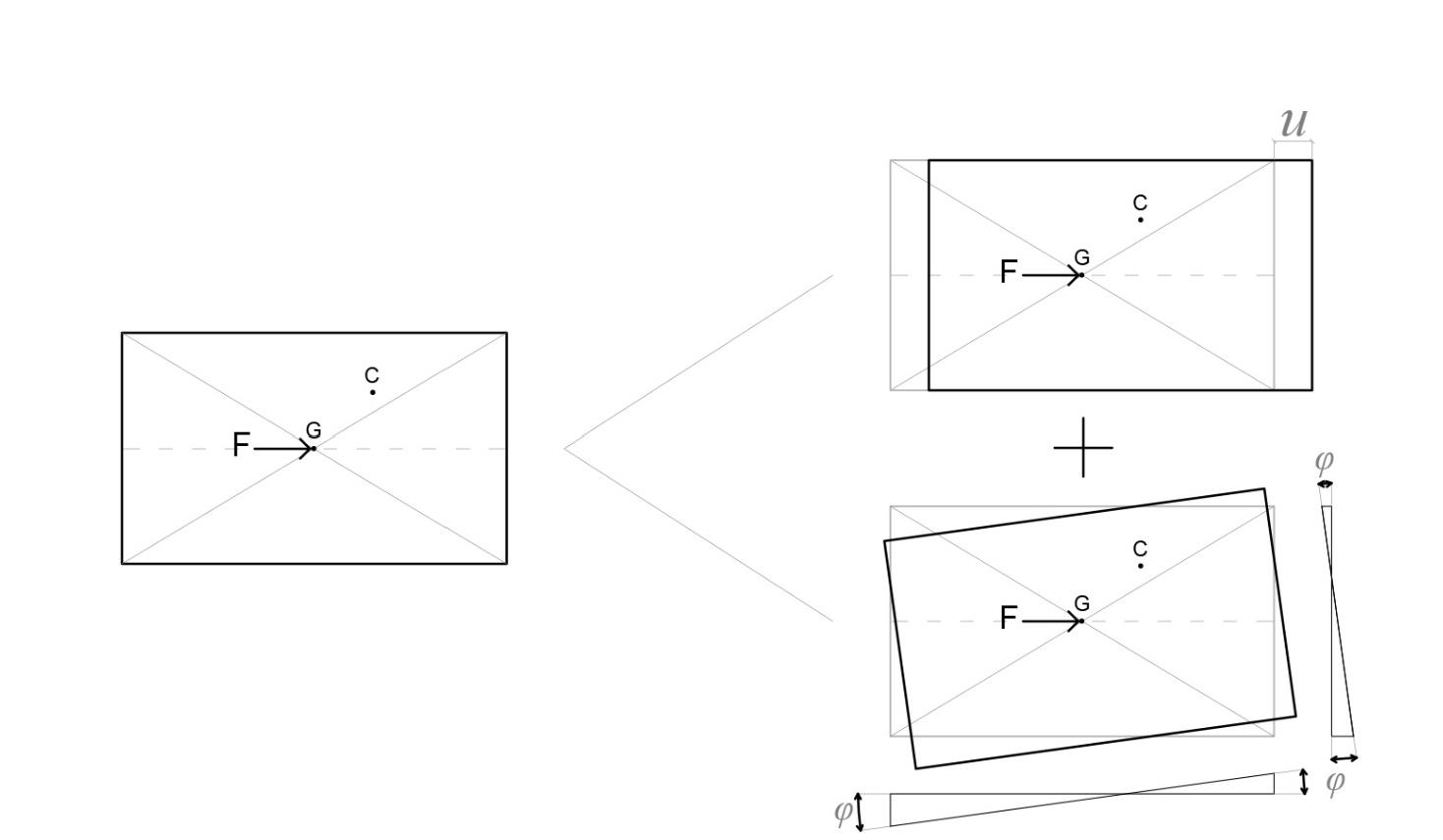
Rotazione e spostamento dettati da una forza applicata orizzontalmente
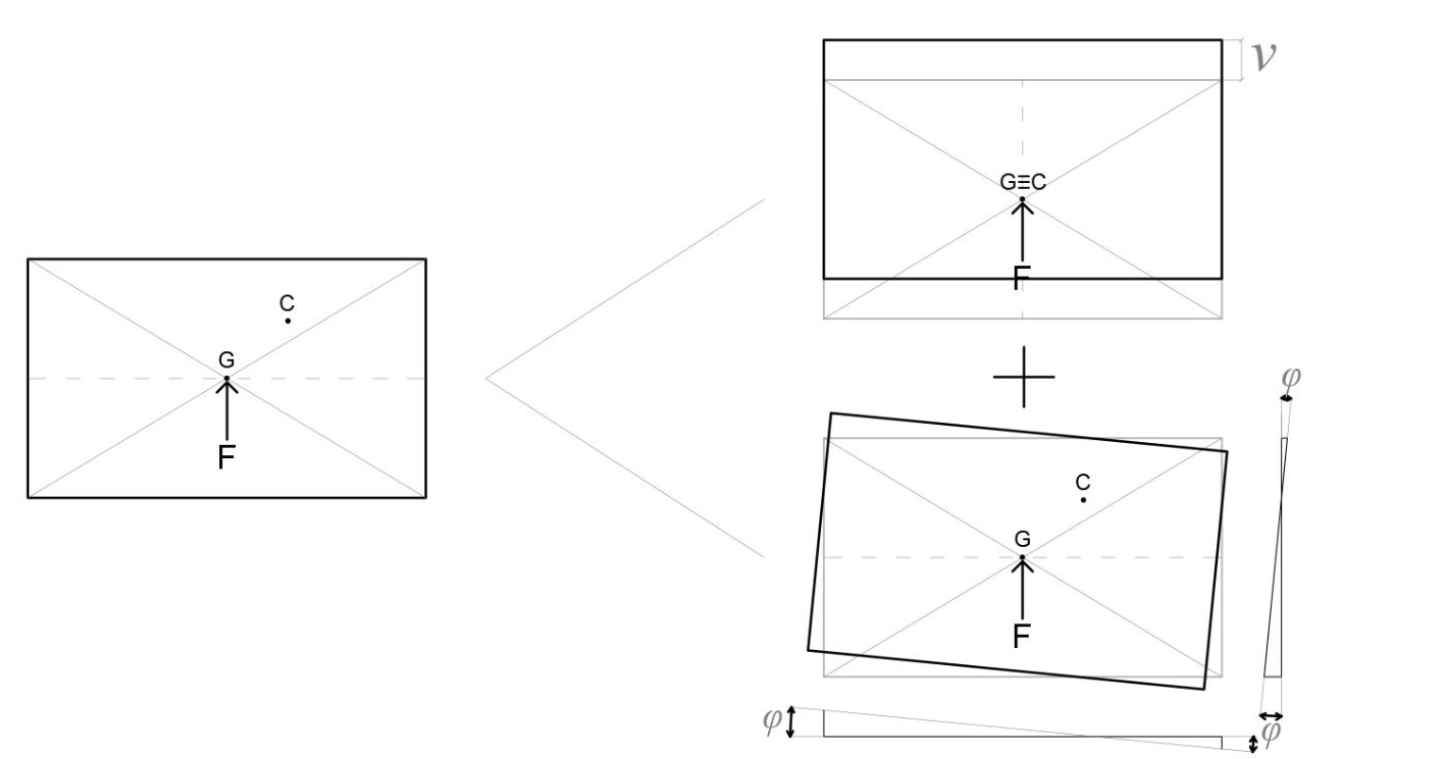
Rotazione e spostamento dettati da una forza applicata verticalmente.
Nella tabella precedente, oltre a calcolare le coordinate del centro di rigidezza, ricaviamo anche il valore della rigidezza torsionale KΦ, ossia la sommatoria di tutte le rigidezze dei controventi (calcolate nel primo passaggio) moltiplicate per la loro distanza dal centro delle rigidezze. Questa rigidezza torsionale servirà in seguito – come vedremo – per il calcolo della rotazione dell’impalcato secondo una direzione.
KΦ =Σi=1->nKvi*dd2vi + Koi*dd2oi
Manca ora il calcolo della forza sismica che agisce nel centro di massa: conditio sine qua non, l’analisi dei carichi sismici, ergo il carico totale permanente G ed il carico totale accidentale Q.
Ipotizziamo il solaio latero cementizio seguente:
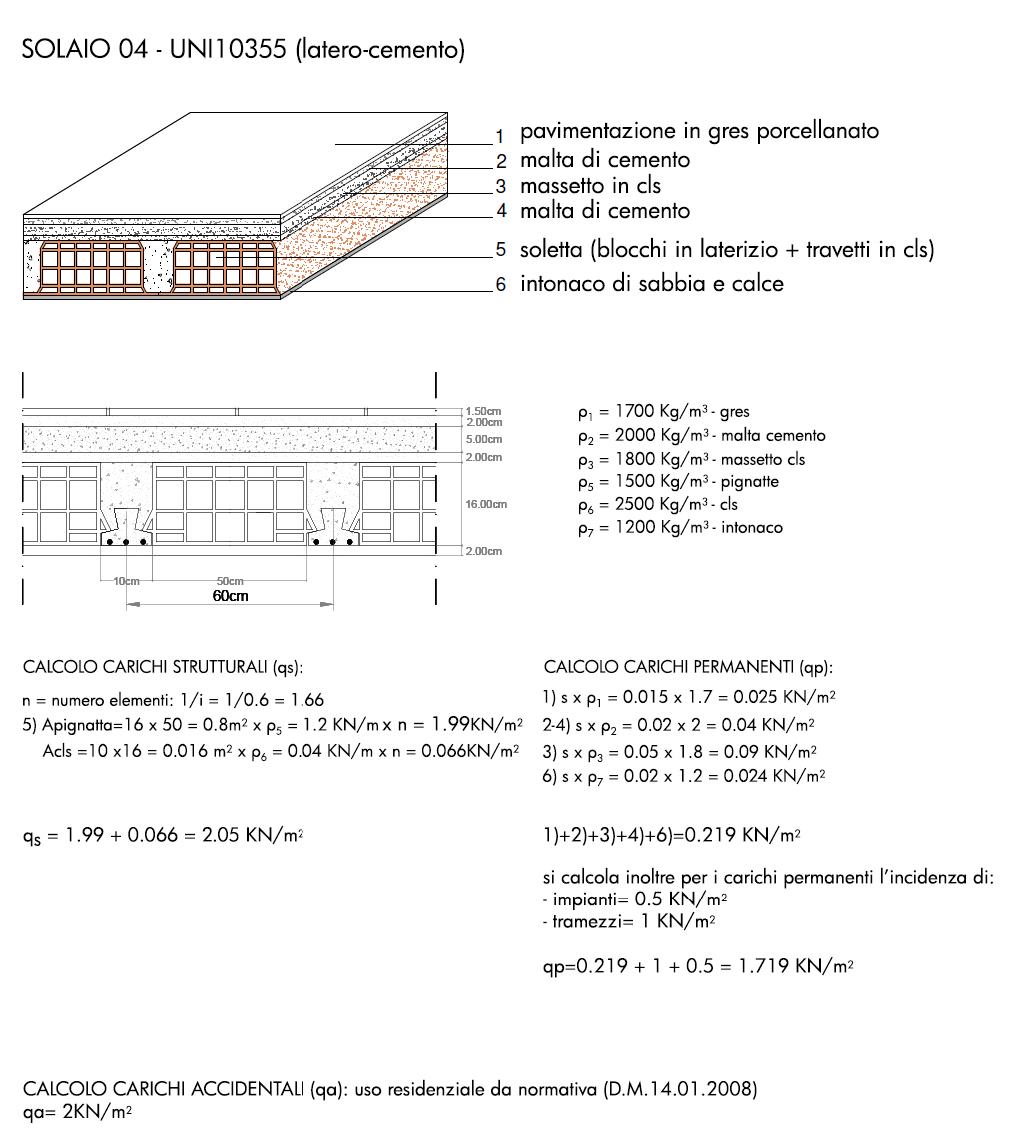
Il carico totale permanente G sarà uguale a G = (qs + qp)*Atot
Il carico totale accidentale, invece Q = qa*Atot
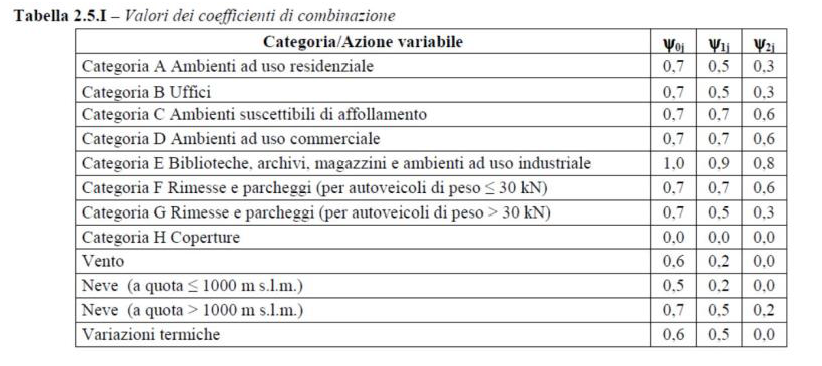
Introduciamo quindi il carico sismico W = G + Q*ψ
con ψ equivalente al coefficiente di contemporaneità, il cui valore è fornito dalla normativa; nel nostro caso, ipotizziamo una categoria A (ambienti ad uso residenziale), con quindi una fattore ψ=0,3:
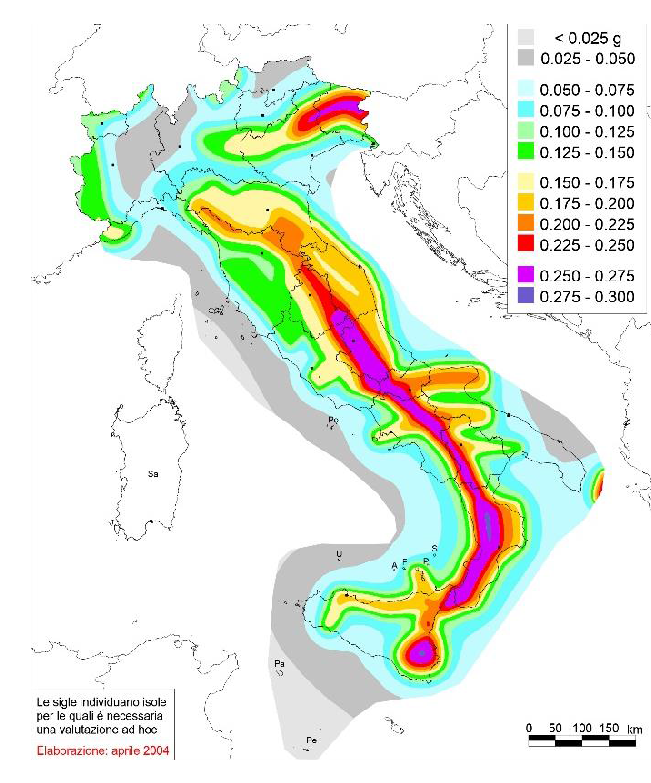
Il peso sismico W, espresso in kN, rappresenta la forza peso dell’edificio, data dal prodotto tra la massa dell’edificio e l’accelerazione di gravità. Poiché il sistema ha un’accelerazione mediamente più piccola dell’accelerazione di gravità, può essere introdotto un coefficiente di intensità sismica c, che tenga conto della sismicità del luogo di progettazione dell’edificio
F=W*c
Nel nostro caso, c=0,1

Ci stiamo quindi avviando alla conclusione. Si dovrà ora quantificare la ripartizione della forza sismica F lungo l’asse x e lungo l’asse y (nello specifico, per ognuno dei diversi controventi). Detto altrimenti, arriviamo infine a calcolare il valore degli spostamenti u, v e Φ.
Lo spostamento orizzontale, u, sarà pari ad u = F/(ko_tot)
Lo spostamento verticale, che chiamiamo v, sarà pari a v = F/(kv_tot)
Infine, la rotazione Φ impressa all’impalcato sarà uguale a Φ=M/kΦ
Una volta determinato il valore dei gradi di libertà, possiamo ricavare la forza sui singoli controventi nei due casi di carico.
Quando la forza è parallela all’asse x, la reazione elastica dei controventi orizzontali sarà pari a:
Fo_n= ko_n (u+Φ*ddo_n)
Mentre in quelli verticali:
Fv_n=kv_n* Φ*ddv_n
Quando invece la forza è parallela all’asse y, la reazione elastica dei controventi verticali sarà:
Fv_n=kv_n(v+ Φ*ddv_n)
Mentre in quelli orizzontale sarà
Fo_n=ko_n* Φ*ddo_n
Intuitivamente, poiché il corpo non si limita a traslare, per poter conoscere il valore della rotazione, bisognerà calcolare il Momento Torcente M dell’asse x, moltiplicando la forza sismica F per il suo braccio, ovvero la differenza tra l’ordinata del centro delle rigidezze e quella del centro di massa, e per l’asse y, utilizzando come braccio la differenza tra le ascisse dei due centri. Infine, si calcola la traslazione orizzontale, dividendo F per la rigidezza traslante orizzontale, la traslazione verticale, dividendo F per la rigidezza traslante verticale, e le rotazioni, dividendo i rispettivi Momenti torcenti per la rigidezza rotazione K Φ.

L’esercitazione è così conclusa. Vorrei ora spendere alcune righe per spiegare in maniera molto sintetica come siamo arrivate alle formule scritte poco sopra.
Astraiamoci dal caso specifico ed immaginiamo un sistema iperstatico come quello riportato nella figura sottostante
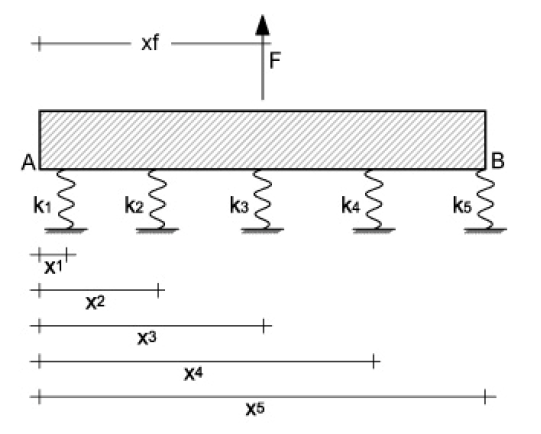
Dato che il corpo è rigido e piano, la cinematica dipende solamente da tre parametri:
la traslazione orizzontale δo, la traslazione verticale δv e la rotazione Φ.
Per determinare le tre incognite, si ipotizza un parametro di spostamento per volta, registrando le azioni nelle molle che questo produce; poi, invocando il principio di sovrapposizione degli effetti, in ogni molla si somma il contributo dovuto ad ognuno dei tre parametri. In conclusione, si scrivono le tre equazioni di equilibrio e si ricavano i valori dei tre parametri.
Nel caso in figura, non ci sono né forze né molle orizzontale, di conseguenza δo=0.
Le incognite da determinare sono quindi δv e la rotazione Φ. Gli effetti che essi inducono sulle reazioni vincolari elastiche sono i seguenti:
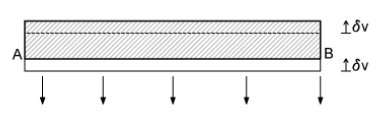
Con Ri1 = -ki δv
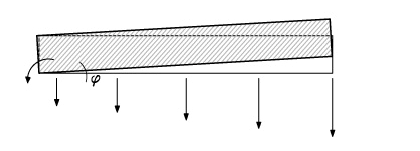
Con Ri2=-ki δv Φxi
Applicando il principio di sovrapposizione degli effetti, avremo R= Ri1 + Ri2
Sinteticamente: vado a scrivere le equazioni di bilancio alla traslazione verticale ed alla rotazione. Se il punto O attorno al quale abbiamo scelto di far agire Φ ed effettuato il bilancio dei momenti è pari a C, la soluzione sarà immediata, arrivando così alle formule applicate precedentemente.
Noti δo, δv e Φ, posso determinare le reazioni elastiche di ogni controvento.