Facoltà di Architettura - Università degli Studi Roma Tre
Problema iperstatico - Trave continua
Dopo la linea elastica, si utilizza un altro strumento per risolvere il problema iperstatico. In particolare si vuole risolvere una trave continua su più appoggi, 3 volte iperstatica, attraverso il metodo delle forze.
Lo schema di calcolo è il seguente:
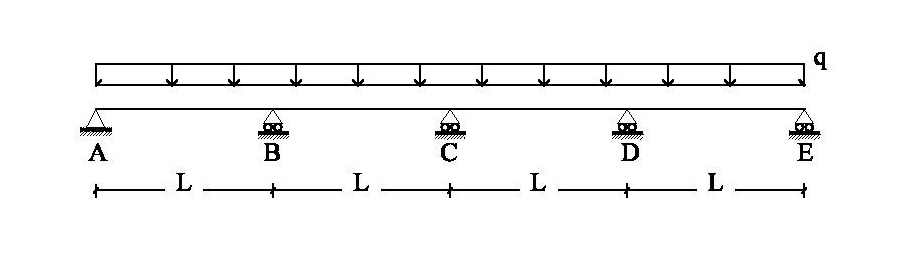
I valori delle rotazioni dovute sia alla forza X che al carico q non saranno calcolate, ma saranno ricavate dai seguenti schemi notevoli:

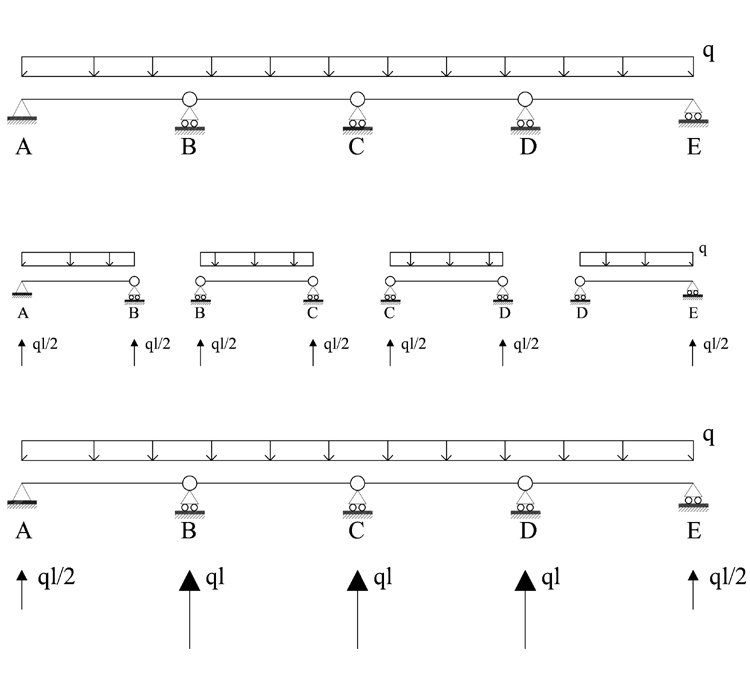
1. SCHEMA ISOSTATICO EQUIVALENTE, nel quale, in corrispondenza degli appoggi rappresentati dai carrelli, rompo la continuità della trave ( abbassando i gradi di vincoli da tre a due).
2. EQUAZIONI DI VINCOLO E EQUAZIONI DI COMPATIBILITA’CINEMATICA
Impongo che in corrispondenza degli appoggi la rotazione relativa sia uguale a zero in modo che venga ripristinata l’azione del vincolo cinematico soppresso.
Equazioni di vincolo
· ∆φB = 0
· ∆φC = 0
· ∆φD = 0
Equazioni di compatibilità cinematica
· ∆φB = φBs – φBd = 0
φBs = φBs (q) + φBs (X1) = ql³/24EI – X1L / 3EI
φBd = φBd (q) + φBd (X1) + φBd (X2) = - ql³/24EI + X1L/3EI + X2L/6EI
ql³/24EI – X1L / 3EI + ql³/24EI - X1L/3EI - X2L/6EI = 0 → X₁= - ql²/8 - X₂/4
· ∆φD = ∆φC = φCs – φCd = 0
φCs = φCs (q) + φCs (X1) + φCs (X2) = ql³/24EI – X1L / 6EI – X2L / 3EI
φCd = φCd (q) + φCd (X1) + φCd (X2) = - ql³/24EI + X1L/6EI + X2L/3EI
ql³/24EI – X1L / 6EI – X2L / 3EI + ql³/24EI - X1L/6EI - X2L/3EI = 0 → X₂= ql²/8 - x₁/2
3. RISOLUZIONE DEL SISTEMA DI EQUAZIONI
X₁= - ql²/8 - X₂/4
X₂= ql²/8 - x₁/2

X1= 3/28 ql²
X2= ql²/14
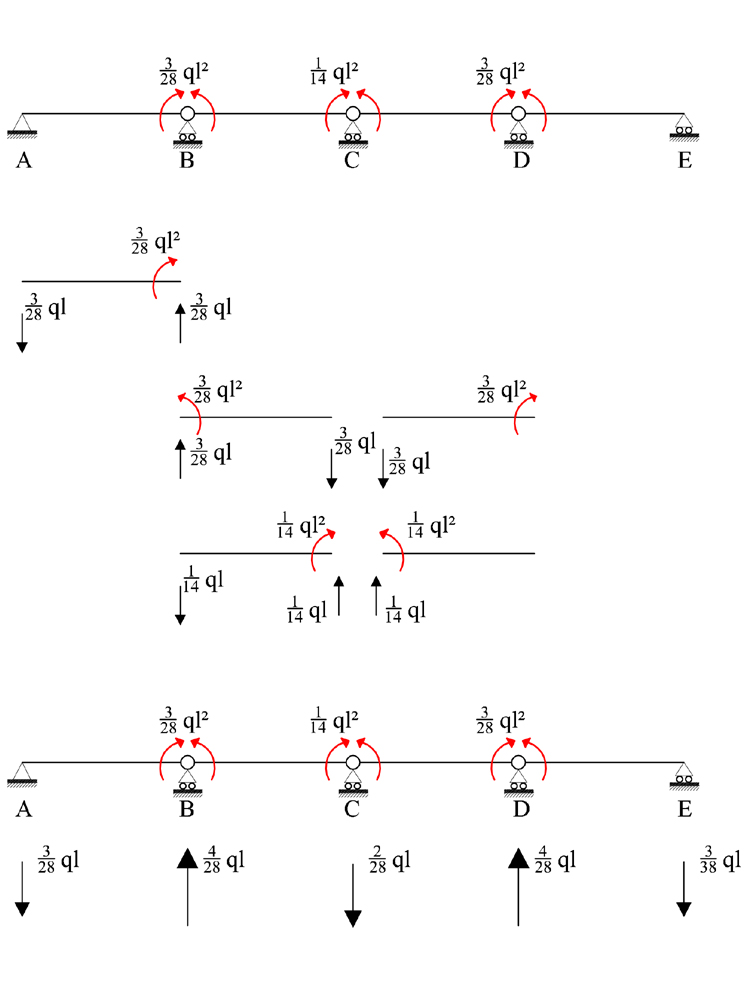
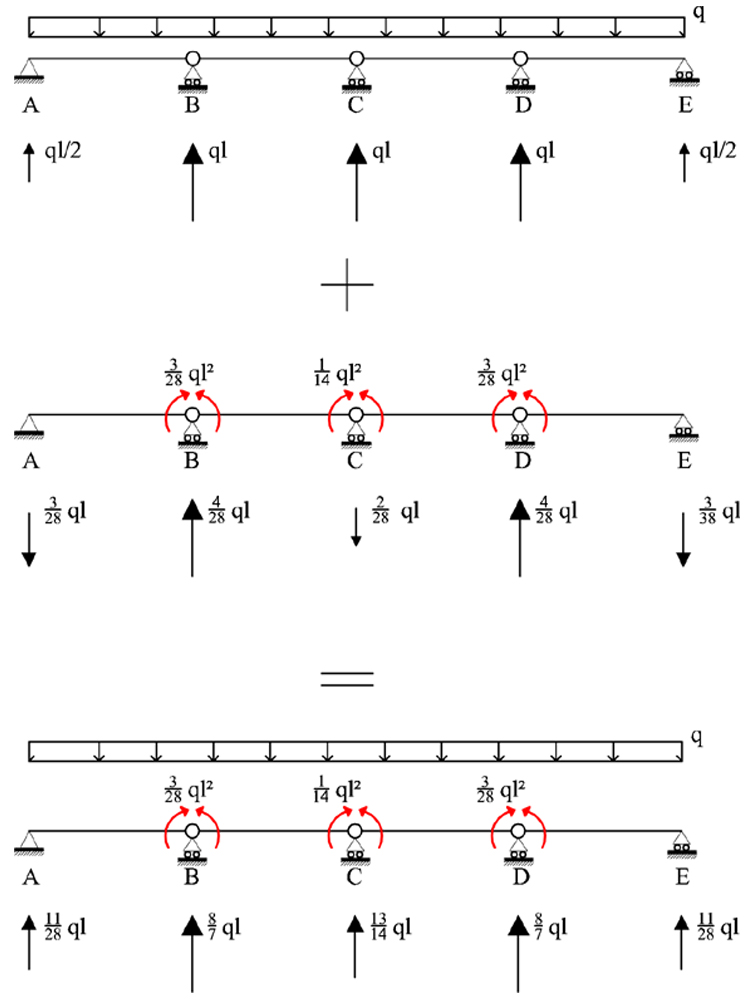
4. SOVRAPPOSIZIONE EGLI EFFETTI
Trovato il valore delle incognite iperstatiche, posso determinare il valore delle reazioni vincolari, utilizzando il principio della sovrapposizione degli effetti e tracciare infine i diagrammi di Taglio e Momento per la struttura in esame.
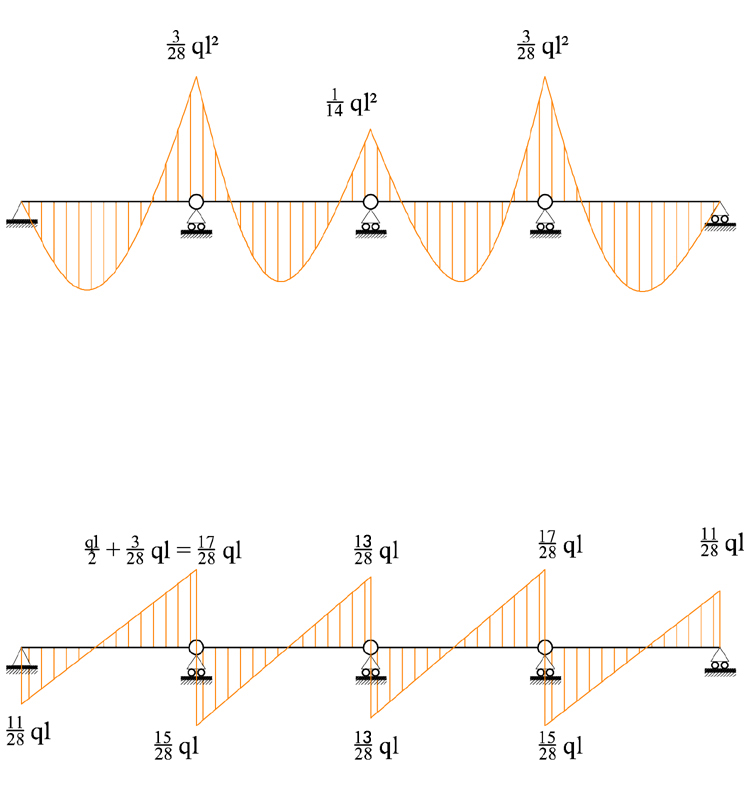
DIAGRAMMI MOMENTO E TAGLIO