Il metodo degli spostamenti è un metodo per risolvere il problema dell’equilibrio sia per strutture
isostatiche, sia per strutture iperstatiche. Esso consente di determinare le reazioni vincolari, i
diagrammi delle sollecitazioni, gli spostamenti e le deformazioni, a partire dai tre gruppi di
equazioni del modello di trave di Bernoulli.
Il metodo degli spostamenti è un metodo per risolvere il problema dell’equilibrio sia per strutture
isostatiche, sia per strutture iperstatiche. Esso consente di determinare le reazioni vincolari, i
diagrammi delle sollecitazioni, gli spostamenti e le deformazioni, a partire dai tre gruppi di
equazioni del modello di trave di Bernoulli
Il meto
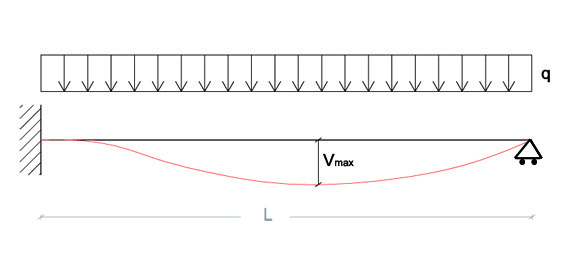
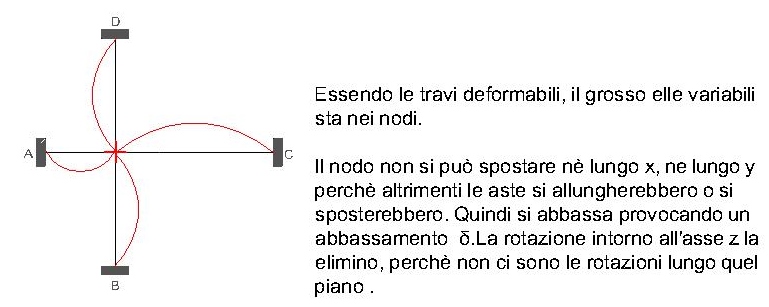
Il metodo della linea elastica serve per risolvere l'equilibrio di strutture sia iperstatiche che isostatiche; consentendoci di determinare le reazioni vincolari, i diagrammi delle sollecitazioni , gli spostamenti e le deformazioni.
Il metodo degli spostamenti è un metodo per risolvere il problema dell’equilibrio sia per strutture
isostatiche, sia per strutture iperstatiche. Esso consente di determinare le reazioni vincolari, i
diagrammi delle sollecitazioni, gli spostamenti e le deformazioni, a partire dai tre gruppi di
equazioni del modello di trave di Bernoulli.
Richiamiamo di seguito tutte le equazioni del modello di trave di bernoulli, distinguendole in tre gruppi in base al loro diverso significato fisico.
-
EQUAZIONI DI BILANCIO esprimono il legame tra carichi esterni e sollecitazioni
dN/ds + q1 = 0
dT/ds + q2 = 0
dM/ds + T = 0
-
EQUAZIONI DI CONGRUENZA esprinono il legame tra deformazioni e spostamenti
E = du/ds
y = dv/ds - φ = 0
X = dφ/ds
dove E = deformazione assiale
y = scorrimento angolare
X = curvatura
-
LEGAME COSTITUTIVO ELASTICO esprimono il legame tra la deformazione e la sollecitazione
N = EA * E
M = EI * X
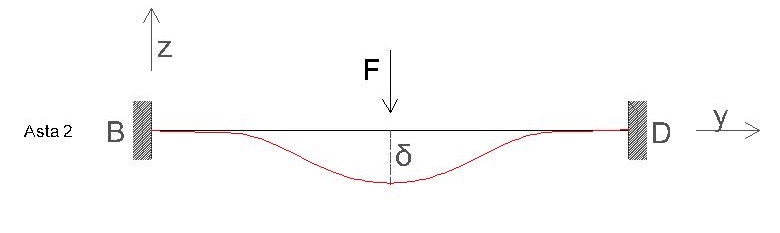
Analizziamo il problema flessionale e prendiamo in considerazione le seguenti grandezze
v ; Y ; T ; M ; x
quindi non prendendo in considerazione le equazioni che riguardano lo sforzo normale, le equazioni che definiscono il problema flessionale sono :
dT/ds + q2 = 0
dM/ds + T = 0
M = EI * X
X = dφ/ds
φ= dv/ds
Prendiamo in considerazione l'equazione ( dM / ds ) + T = 0 e ci ricaviamo T = - dM / ds e sostituiamo la T in
( dT/ds ) + q2 = 0
avremo che d/ds ( -dM/ds) + q2 = 0 ⇒ -d2M/ds2 + q2 = 0
X = dφ/ds - d/ds(dv/ds) = d2v/ds2 = d2v/ds2
andiamo ora a sostituire φ= dv/ds in X= dφ/ds
avremo che X = dφ/ds - d/ds(dv/ds) = d2v/ds2 = d2v/ds2
ci rimane solo l'equazione M = EIx
Sostituiamo la x e avremo che M = EI (d2v)/ds
sostituiamo poi l'equazione ricavata nell'equazione -d2M/ds2 + q2 = 0
si avrà che :
d2/ds2 ( EI * d2v/ds2) = q2
portiamo EI al di fuori della derivata e avremo che
EI d4v/ds4 = q2 EQUAZIONE DIFFERENZIALE DELLA LINEA ELASTICA
L'equazione della linea elastica mette in relazione i carichi agenti sulla trave con gli spostamenti da essi prodotti , integrando quattro volte otteniamo la funzione spostamento
d4v/ds = q2/EI
d3v/ds = q2/EIs + c1
d2v/ds = q2/EI * s2/2 + c1s + c2 (3)
dv/ds = q2/EI + s3/6 + c1 * s2/2 + c2s + c3 (2)
v(s) = q2/EI * s4/24 + c1*s3/6 + c2 s2/2 + c3s + c4 spostamento (1)
Abbiamo così ottenuto quattro equazioni che dipendono dai vincoli quindi andiamo a sostituire le equazioni al bordo
Nell'incastro v(0) = 0
Andando a sostituire nella 1 la condizione al bordo v(0) = 0 si ottiene v(s=0) = 0 --> C4 = 0
φ(0) = 0
Sostituendo nella 2 si ottiene
φ (s=0) --> c3=0
Nell'appoggio
v(l) = 0
sostituiamo nella 1 avremo che :
v(s=l)= 0 ⇒ - q2l4/24EI + c1l3/6 + c2l2/2 = 0 (4)
Nel carrello il momento vale zero M (l) = 0
sostituendo nella 3 avremo che :
M(s=l) = 0 ⇒ -q2l2/2EI + c1l + c2 = 0
ci ricaviamo c2 = q2l2/2EI - c1l (5)
sostituiamo c2 nella 4
- q2l4/24EI + c1l3/6 + (q2l2/2EI - c1l ) * l2/2 = 0
- q2l4/24EI + c1l3/6 q2l4/4EI - c1l3/2 = 0
5q2l4/24EI -1/3 l3 c1 = 0
c1 = 5/8 q2l/EI
Andiamo a sostituire c1 nella (5) e ricaviamo c2
c2 = -q2l2/8EI
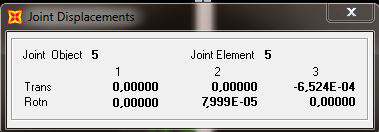
Abbiamo così trovato le quattro costanti di integrazione , ora dobbiamo calcolare l'abbassamento massimo . Sappiamo che y= dv/ds, ossia che la rotazione è la derivata dello spostamento . Quindi nel punto in cui la rotazione è nulla lo spostamento sarà massimo
φ = dv/ds = q2/EI + s3/6 + c1 * s2/2 + c2s + c3
Andiamo a sostituire nell'equazione scritta le costanti trovate
φ (s) = - q2/EI + s3/6 + 5/8 q2l/EI s2/2 - q2l2/8EI + 0
poniamola uguale a zero
φ (s) = - q2/EI + s3/6 + 5/8 q2l/EI s2/2 - q2l2/8EI = 0
che possiamo scrivere come
q/2EI s * ( - s2/3 + 5/8 ls - l2/4) = 0
Questa equazione ha tre soluzioni. Una è data da s=0 ed altre due le troveremo svolgendo l'equazione di secondo grado
-
- s2/3 + 5/8 ls - l2/4 = 0
-
s2/3 + 5/8 ls - l2/4) = 0
Poniamo 1/3 = A -5/8 l = B ⇒ As2 - Bs - l2/4 = 0
Risolvendo con la formula del delta otteniamo due valori :
-
1,3 l ( soluzione non accettabile perchè s < l )
-
0,57 l
I punti di massimo della funzione spostamento si trovano uno a zero e l'altro a 0,57 l. Per ricavarci l'abbassamento massimo basta sostituire la s nell'equazione 4.
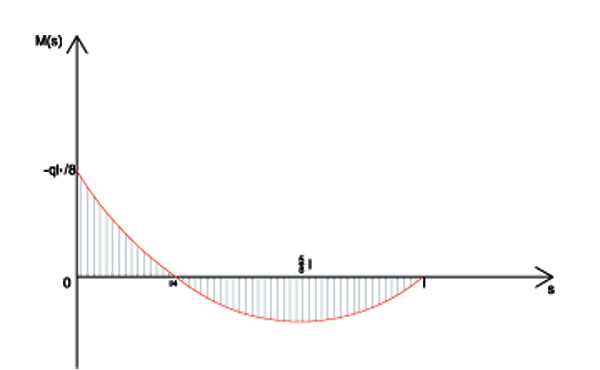
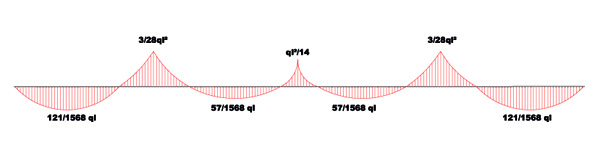
Adesso calcoliamo il momento M
Ms = -q/2 s2 + 5/8 qls - ql2/8
Ora dobbiamo calcolare il punto in cui si annulla la derivata del momento M'(s)
M ( s=0) = -ql2/8
M ( s=l) = -ql2/2 + 5/8 ql2 - ql2/8 = 0
DIAGRAMMA DEL MOMENTO
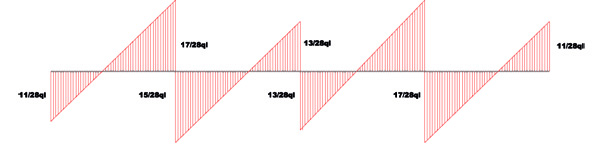
Adesso calcoliamo il taglio
T(s) = -dM/ds = - M'(s)
- M'(s) = T(s) = qs - 5/8 ql
T ( s=l) = ql - 5/8ql = 3/8 ql
DIAGRAMMA DEL TAGLIO

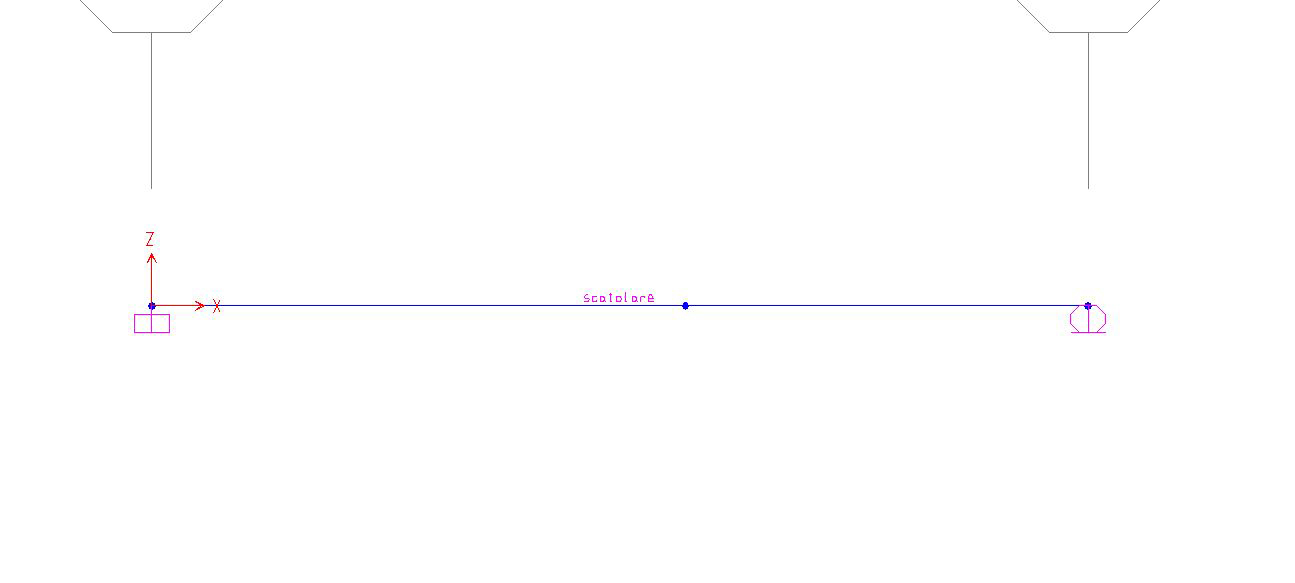
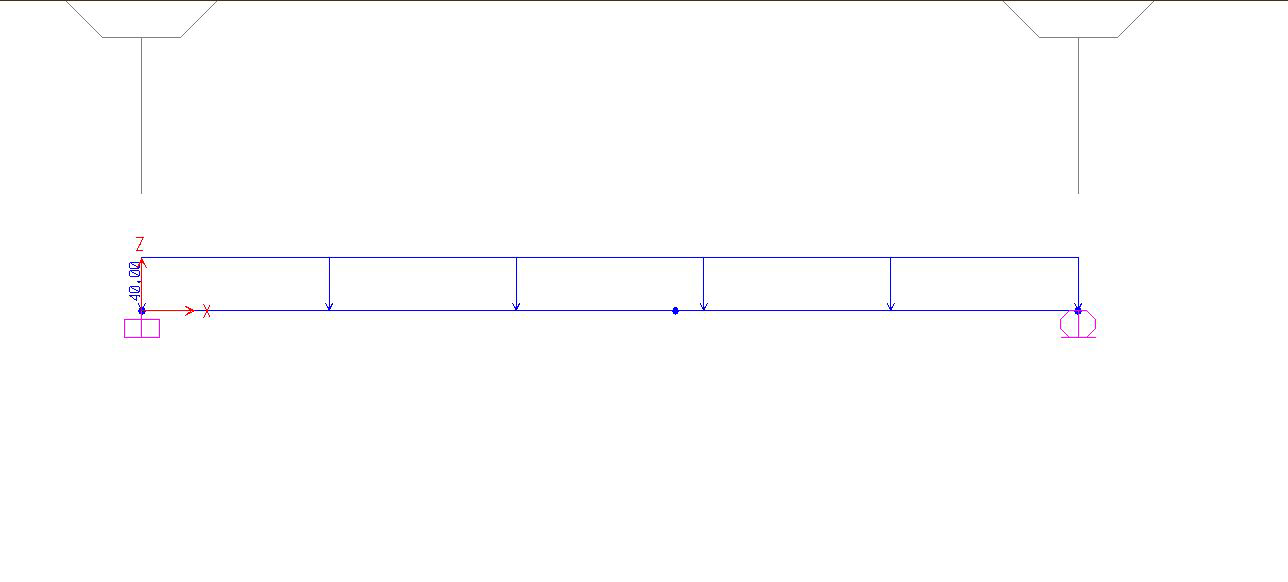
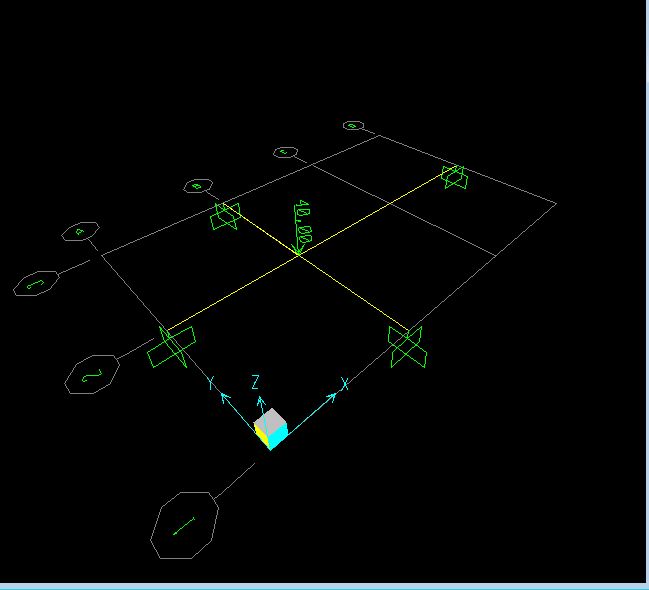
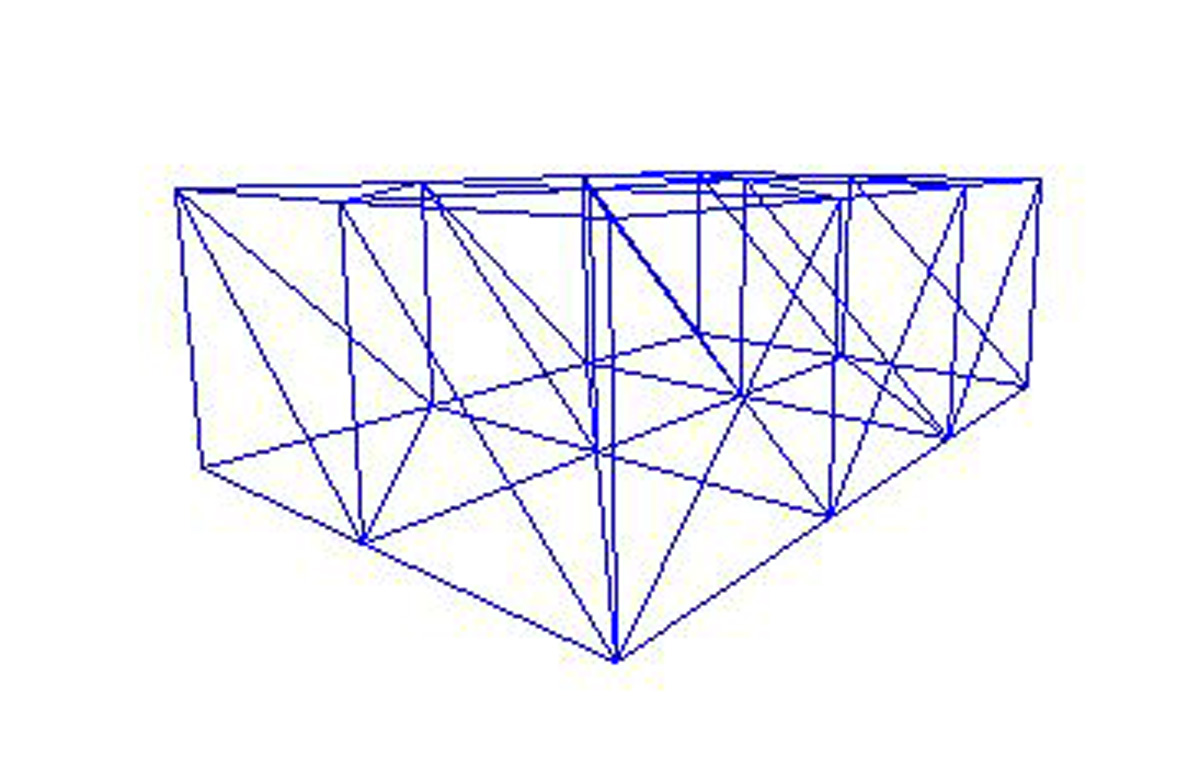
RISOLUZIONE SAP
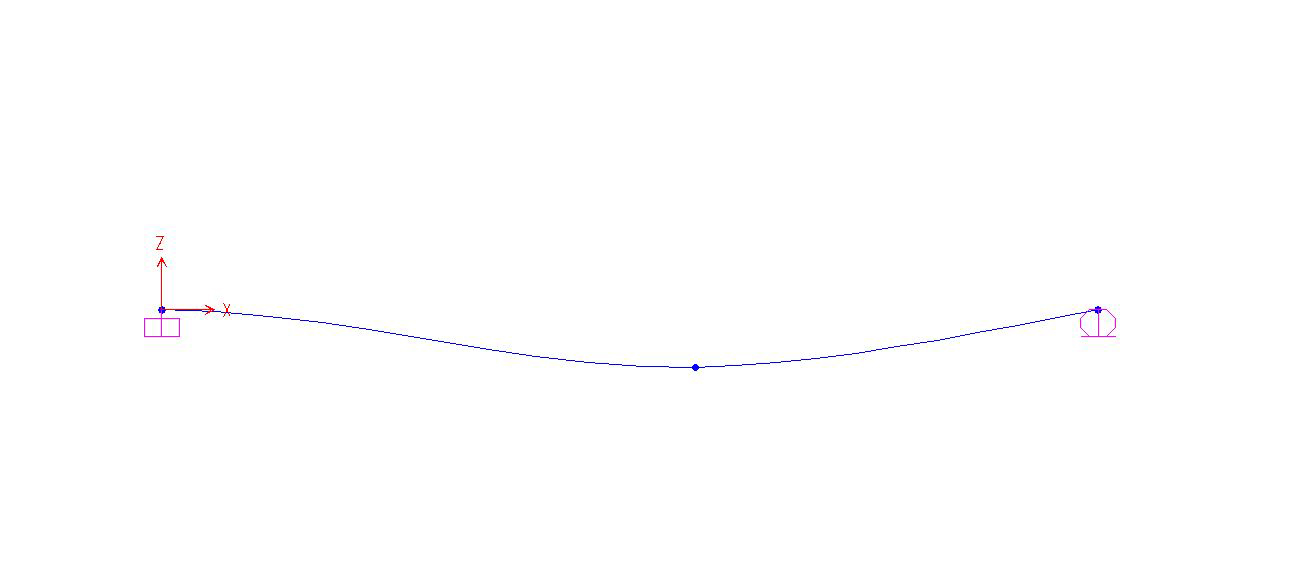
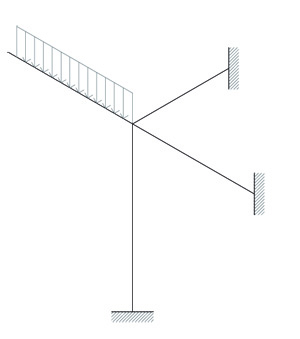
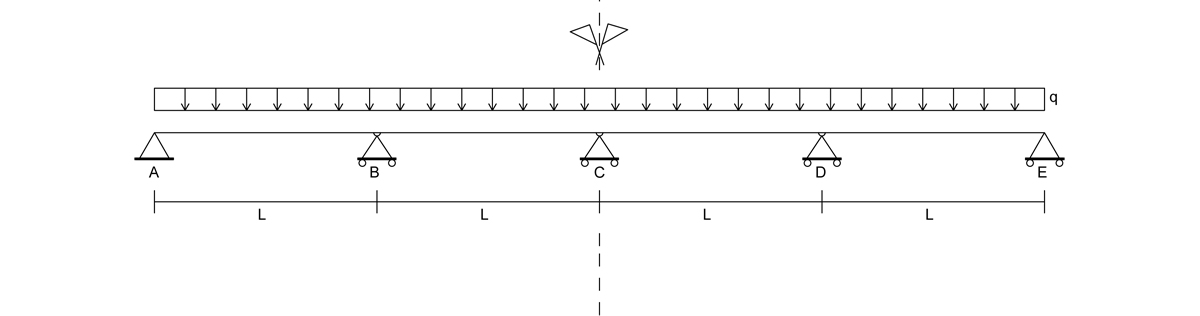
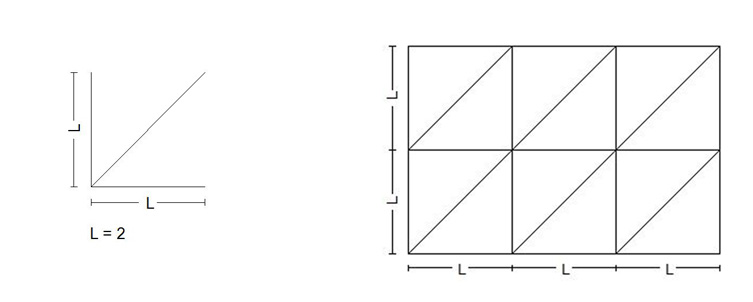
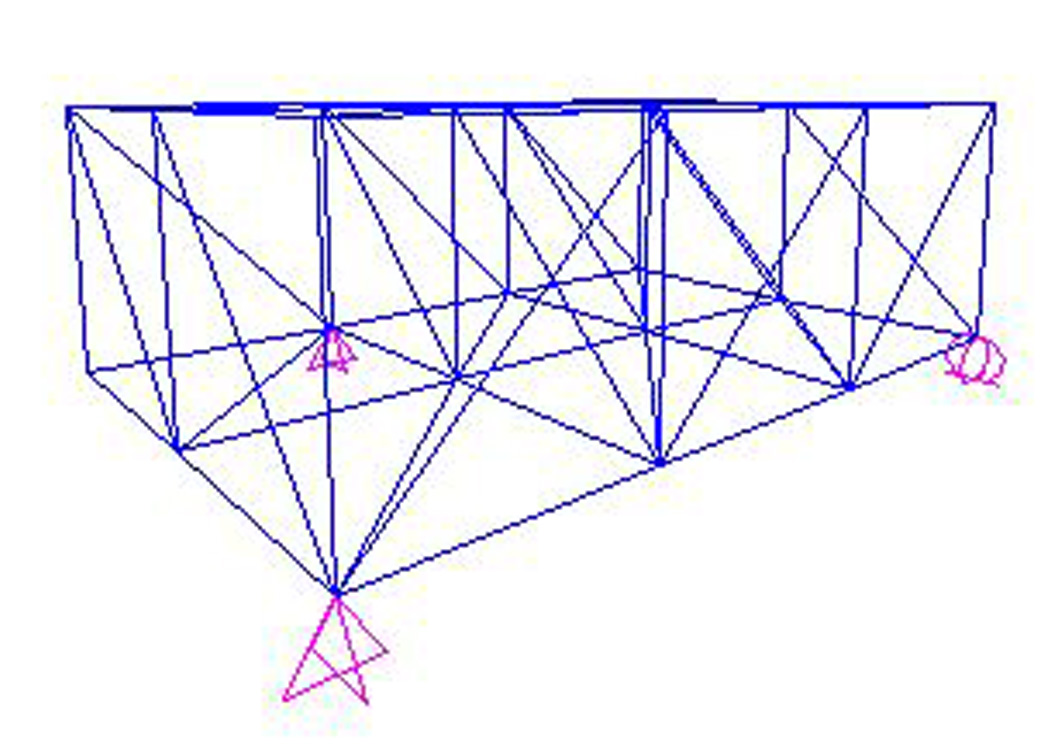
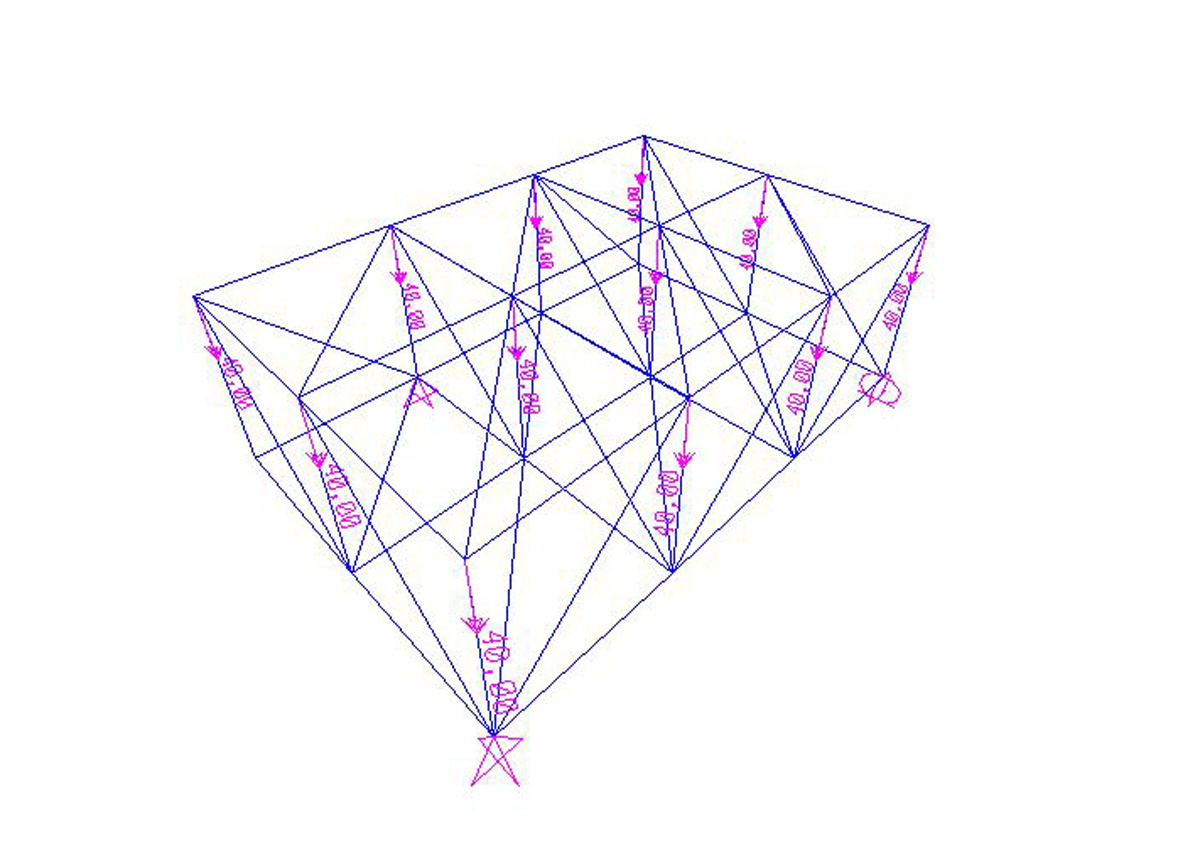
Ho riprodotto la struttura in SAP disegnandola di lunghezza l = 2 e con un carico distribuito pari a q = 40 kN
1. Divido ( con il comando Point ) la struttura in due parti, posizionando il punto ad una distanza di 0,57 dal punto zero e con asse y = z = 0 dato che dal calcolo a mano abbiamo visto che l'ammassamento massimo avviene in questo punto
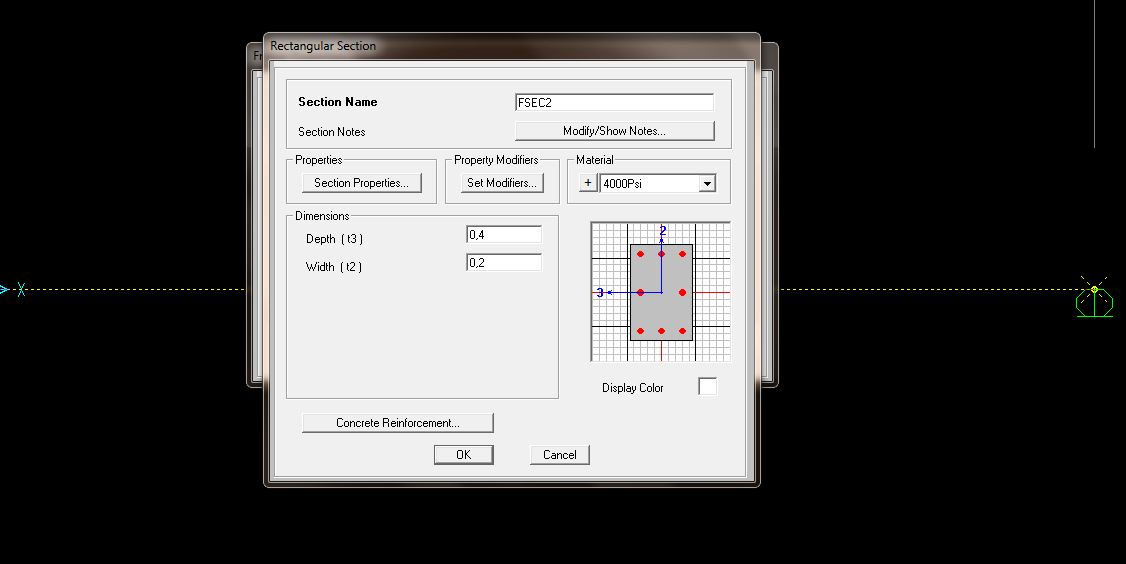
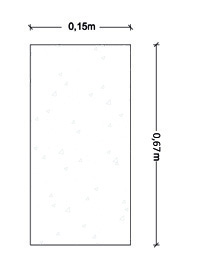
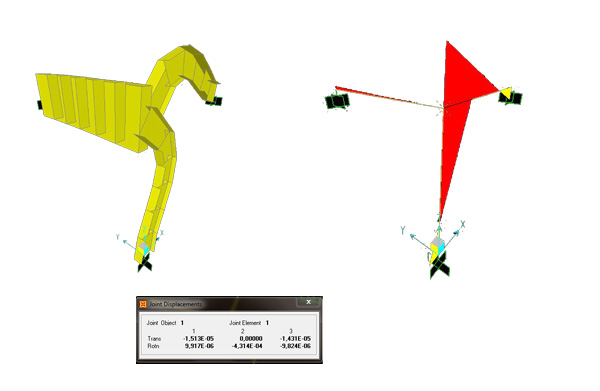
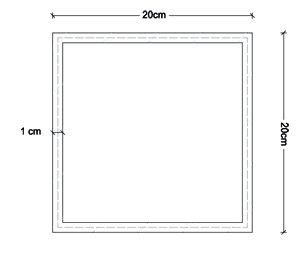
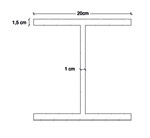
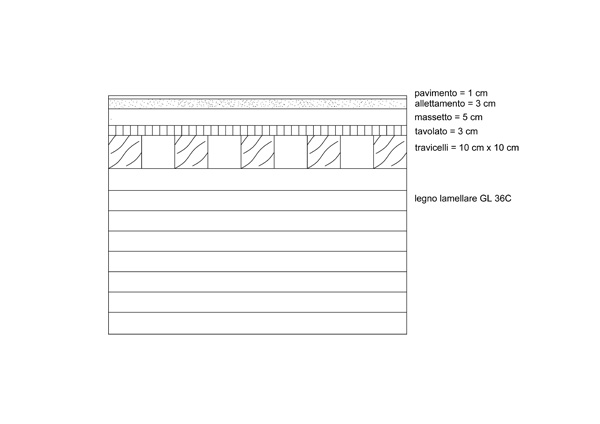
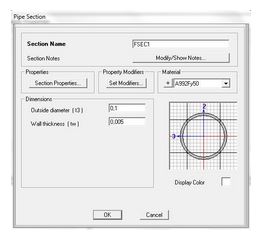
L'analisi è stata fatta su due sezioni differenti , una rettangolare in acciaio cavo
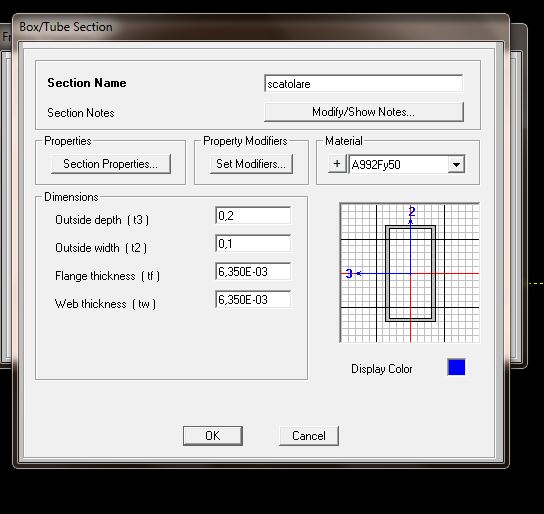
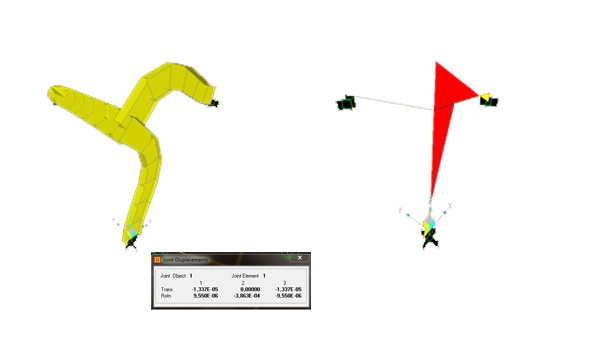
e l'altra in cemento armato
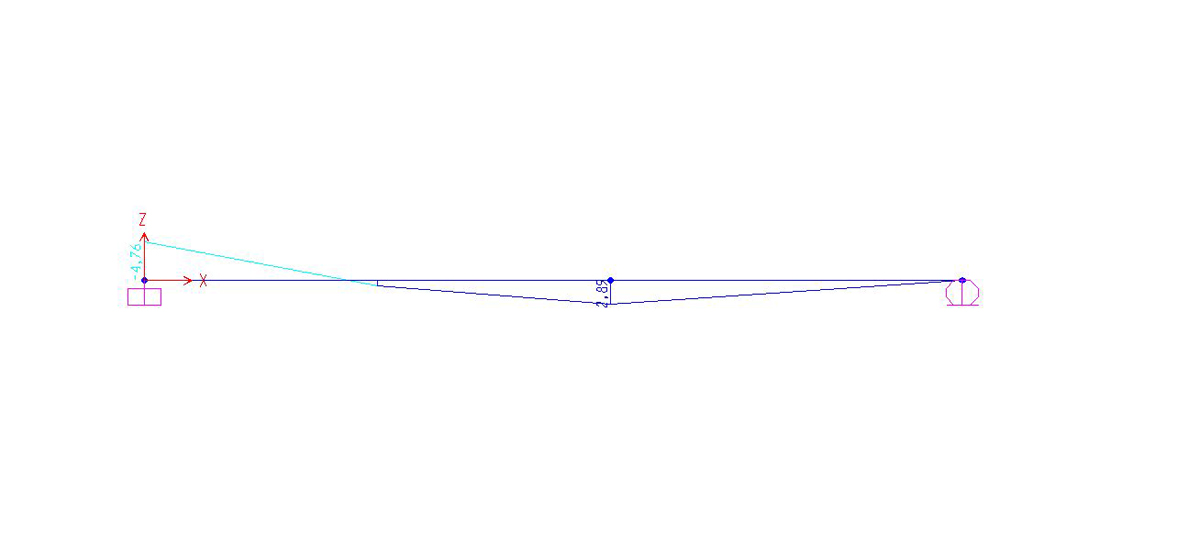
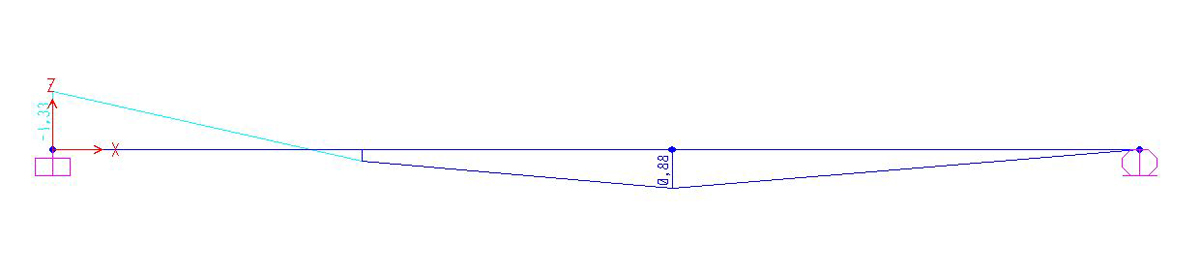
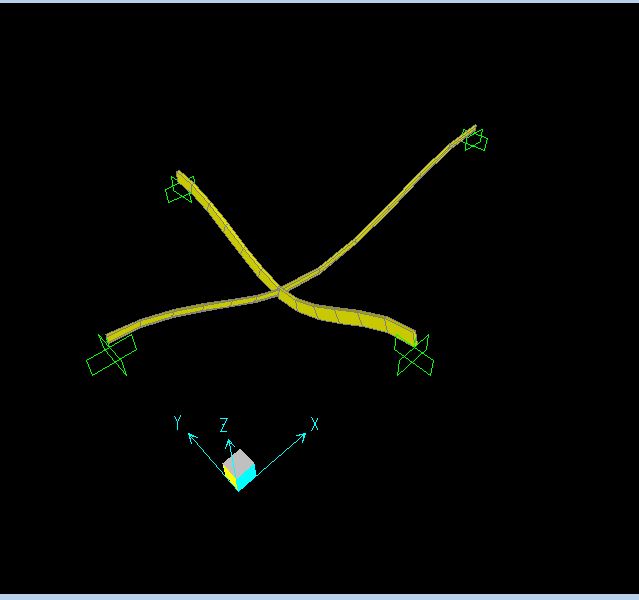
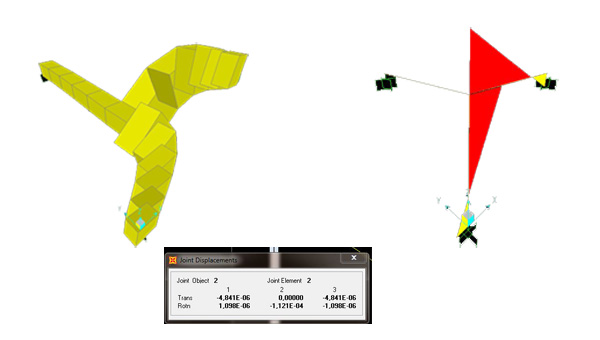
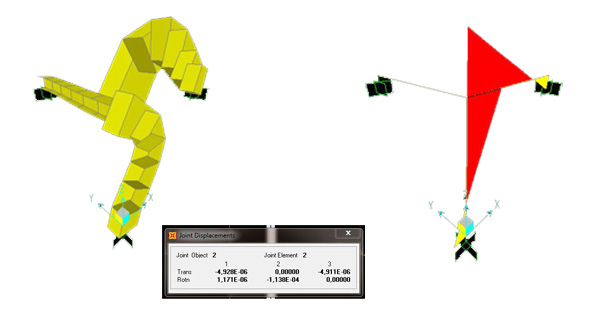
DEFORMATA
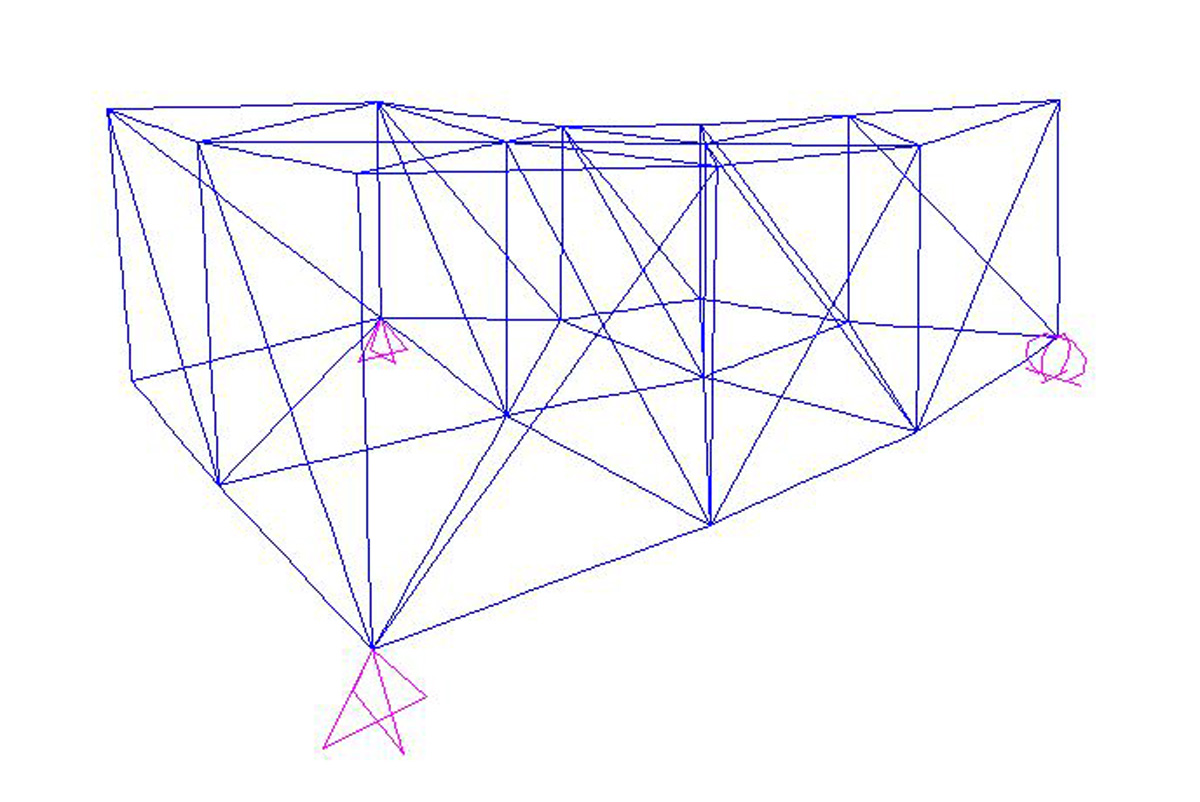
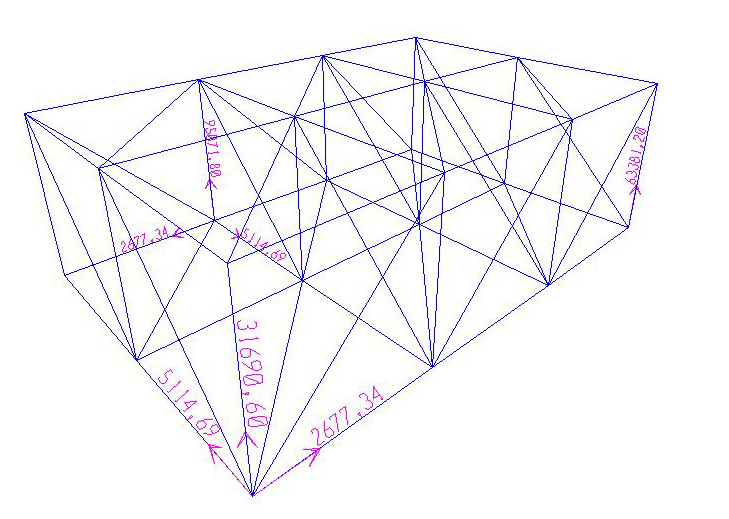
REAZIONI VINCOLARI
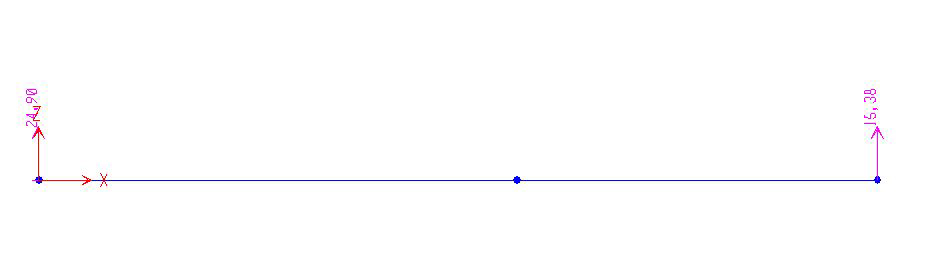
DIAGRAMMA DEL TAGLIO
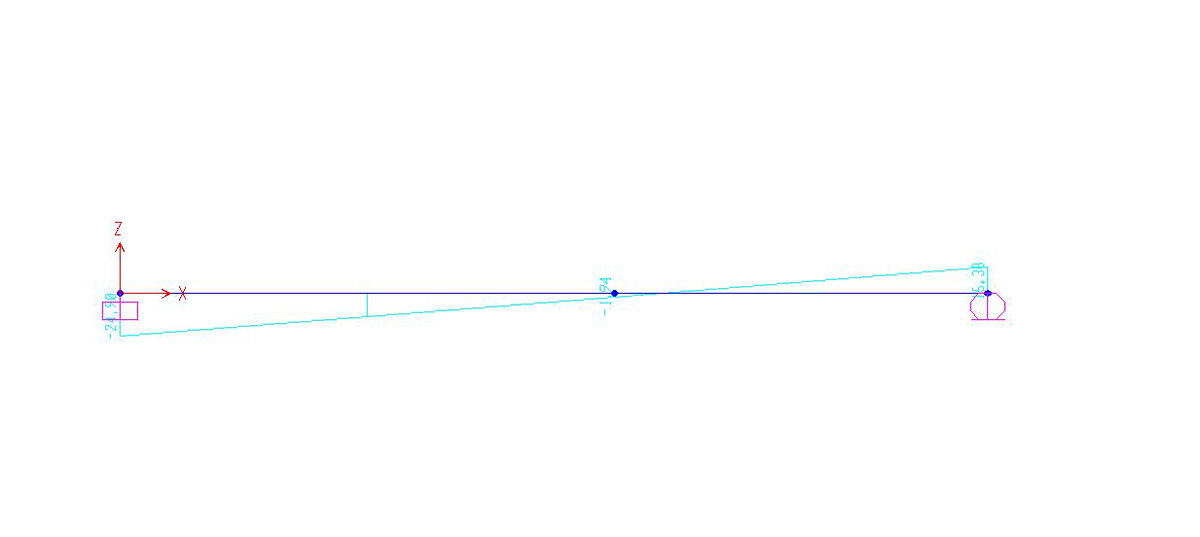
DIAGRAMMA DEL MOMENTO
SEZIONE IN CEMENTO
REAZIONI VINCOLARI

DIAGRAMMA DEL TAGLIO

DIAGRAMMA DEL MOMENTO





_(LM_PA)/1.jpg)
_(LM_PA)/2_1.jpg)
_(LM_PA)/aaa_1.jpg)
_(LM_PA)/DIAGRAMMA TAGLIO.jpg)
_(LM_PA)/MOM.jpg)
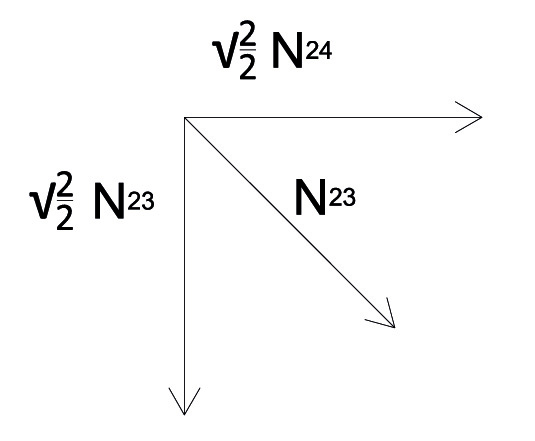
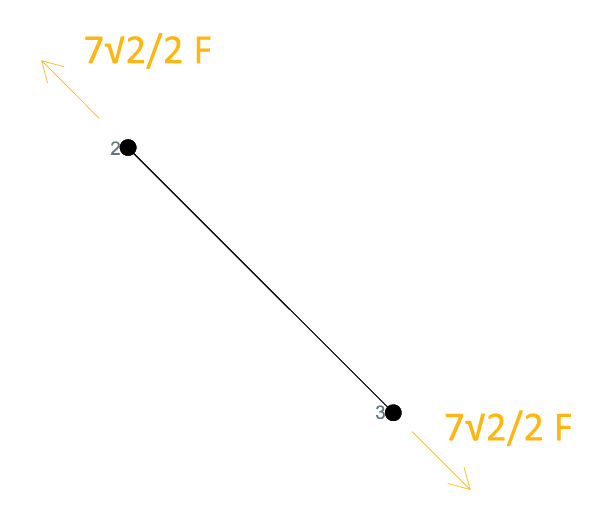
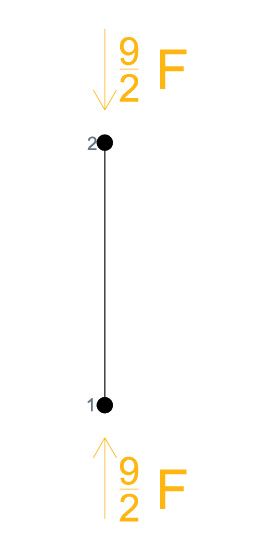
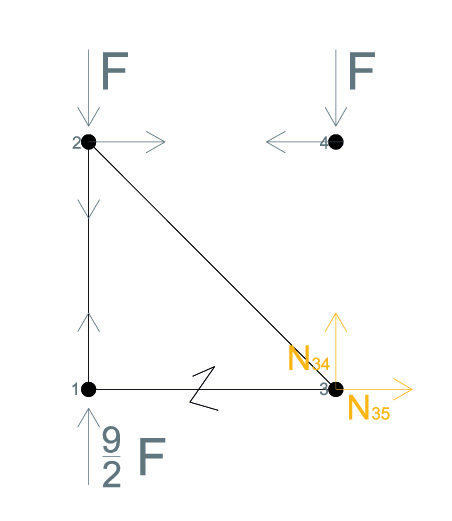
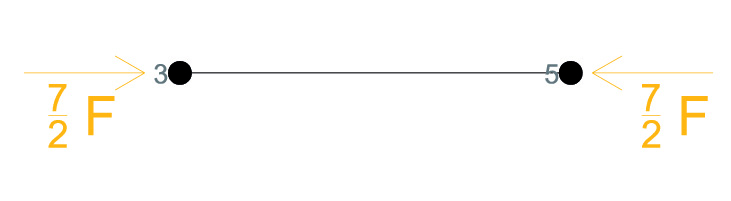
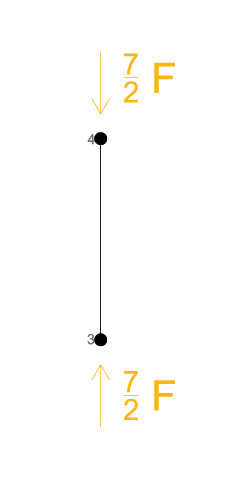
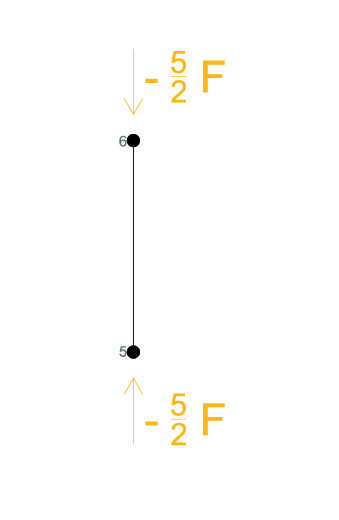
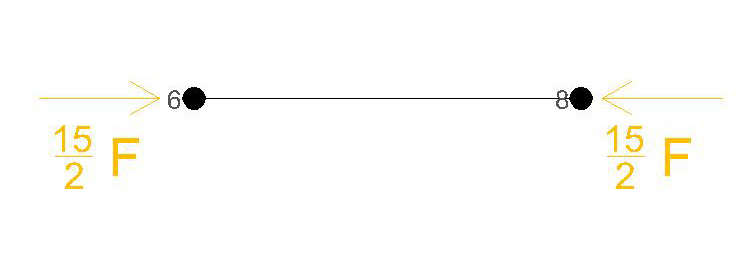
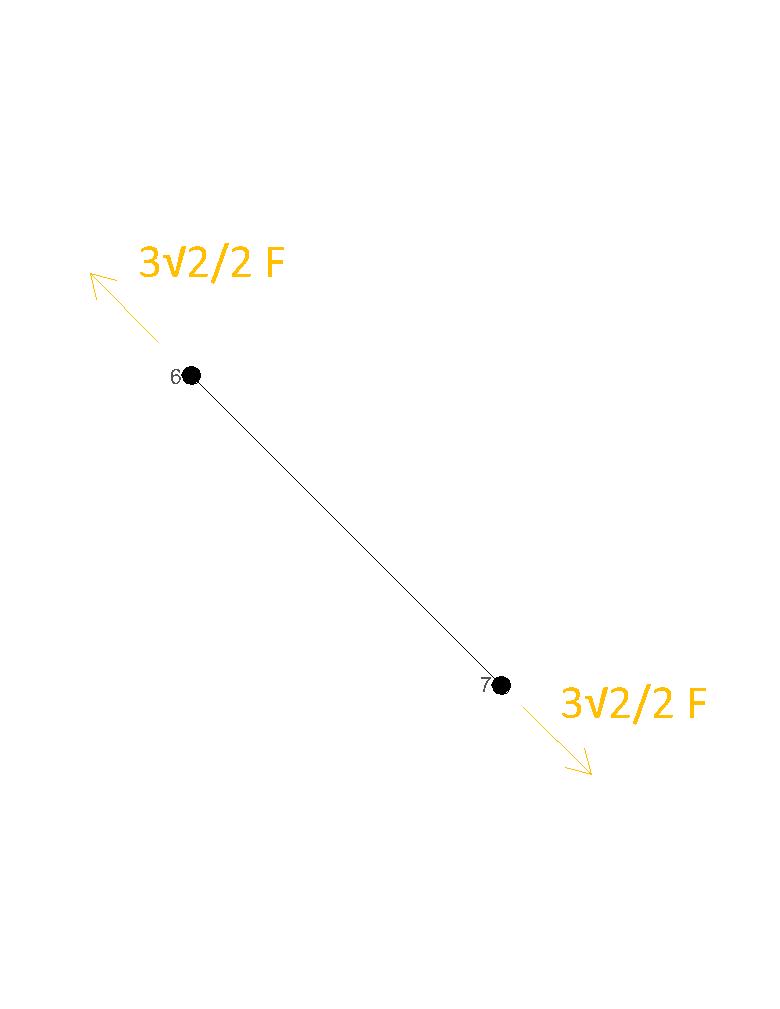
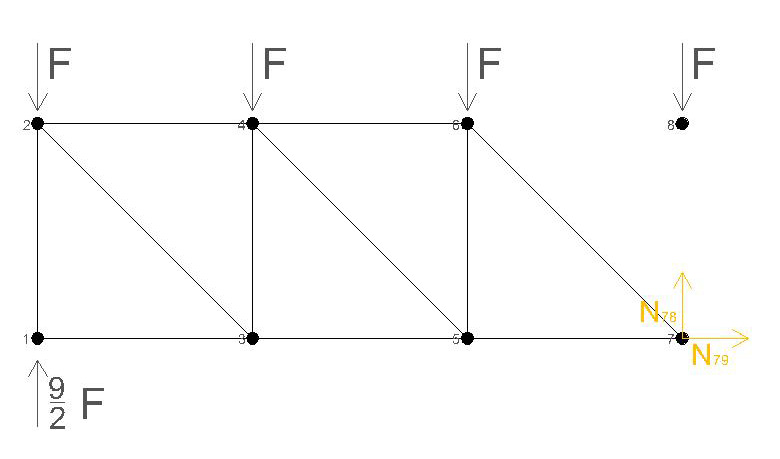
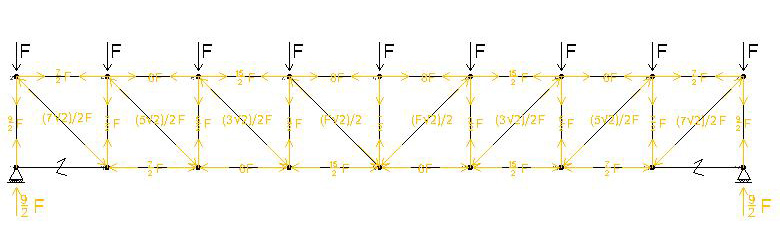
_(LM_PA)/EQUILIBRIO AI NODI.jpg)
_(LM_PA)/22.jpg)
_(LM_PA)/TTG_0.jpg)
_(LM_PA)/MMNT.jpg)
_(LM_PA)/W.jpg)
_(LM_PA)/momento sap2.jpg)
_(LM_PA)/1_0.jpg)
_(LM_PA)/2_4.jpg)
_(LM_PA)/3.jpg)
_(LM_PA)/12.jpg)
_(LM_PA)/5.jpg)
_(LM_PA)/6.jpg)
_(LM_PA)/7.jpg)
_(LM_PA)/8.jpg)
_(LM_PA)/sforzo normale2.jpg)
_(LM_PA)/taglio2_0.jpg)
_(LM_PA)/momento2.jpg)














Commenti recenti