Obiettivo dell’esercitazione è il dimensionamento di massima di una trave soggetta a momento flettente M, ovvero il calcolo dell’altezza della sezione, fatto per 3 diversi tipi di materiali: legno, acciaio e cemento armato.
Prima di tutto è opportuno sottolineare i 2 concetti chiave di questo procedimento, ossia il PESO e la TENSIONE. Il primo inteso non solo come carico effettivamente gravante sulla struttura (che come vedremo andrà calcolato), ma anche come parametro di riferimento imprescindibile in un processo che punta all’ottimizzazione del materiale prescelto in un’ottica di rapporto qualità-prezzo del nostro prodotto. Il secondo, invece, costituisce sostanzialmente la chiave di ogni nostra considerazione, in quanto il dimensionamento si basa su un assunto: la tensione massima riscontrabile nella trave può essere al massimo pari a quella ritenuta convenzionalmente ammissibile per quel determinato materiale.
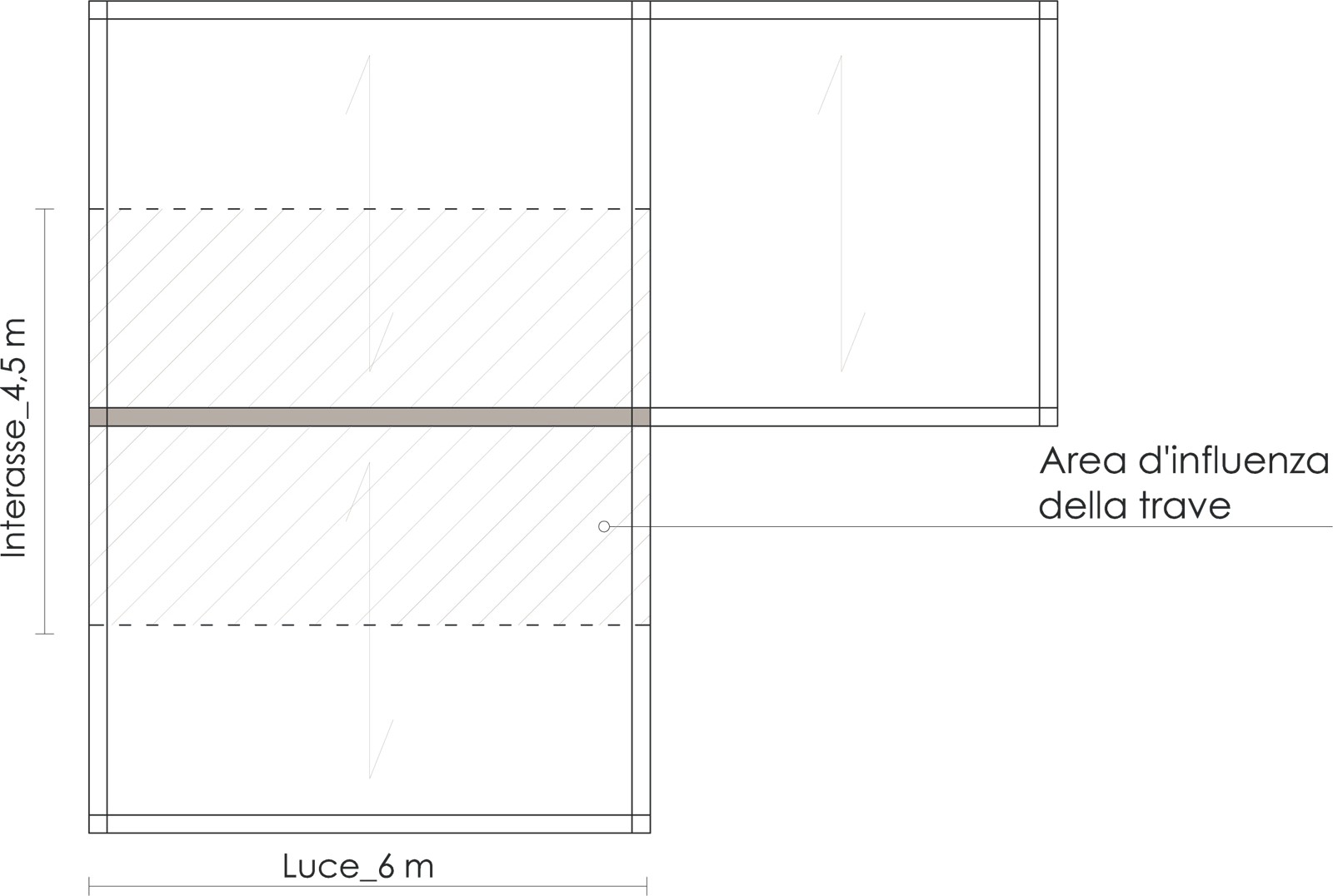
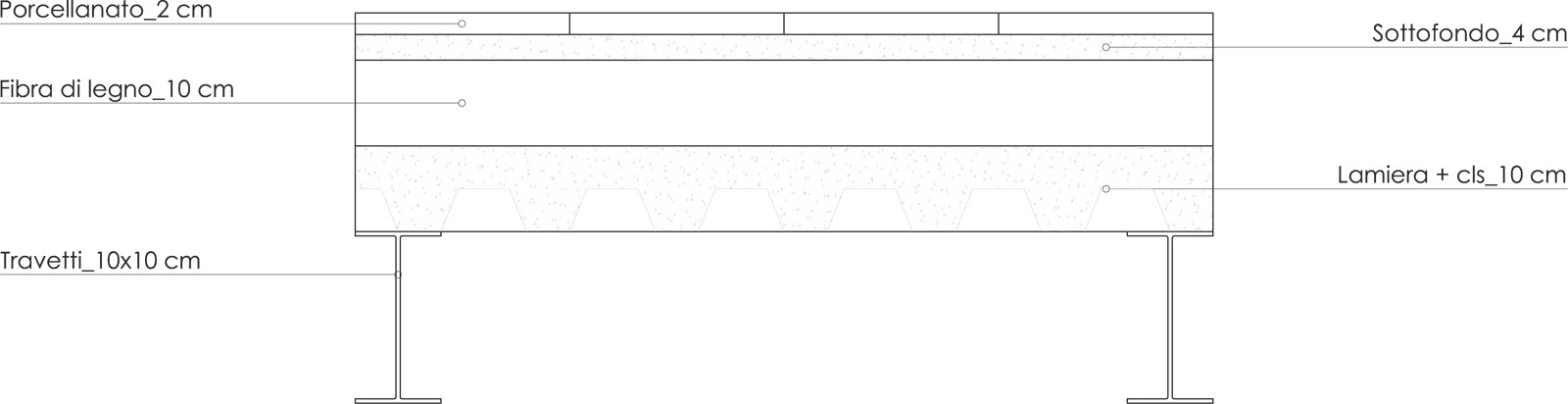
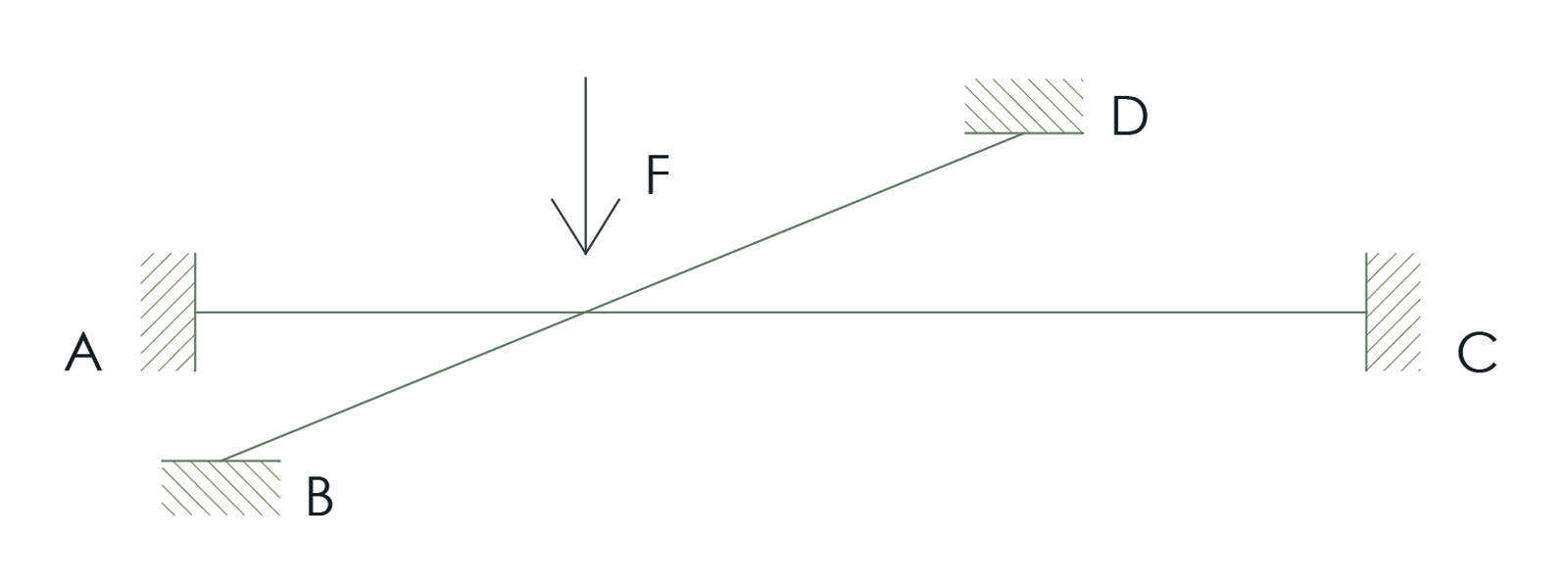
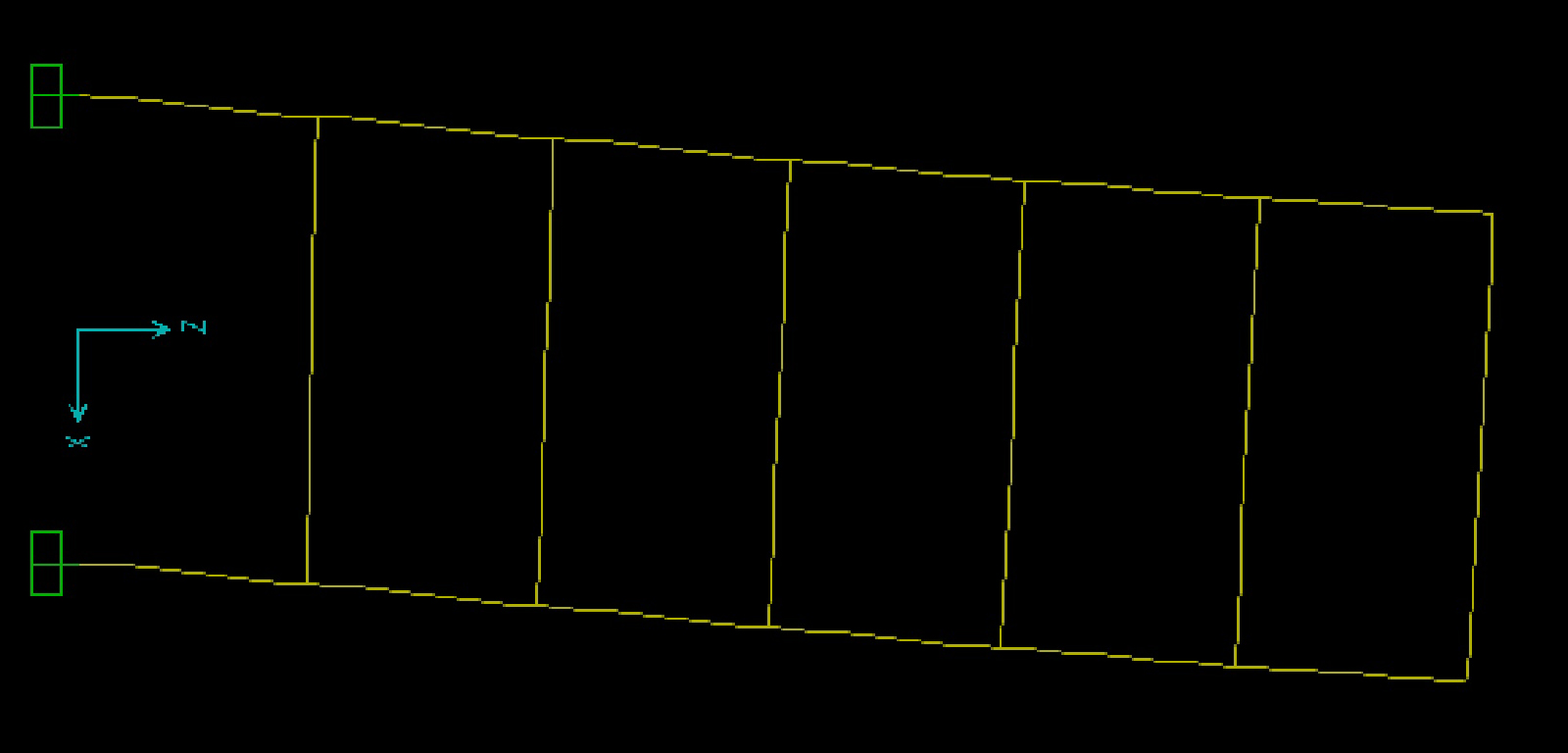
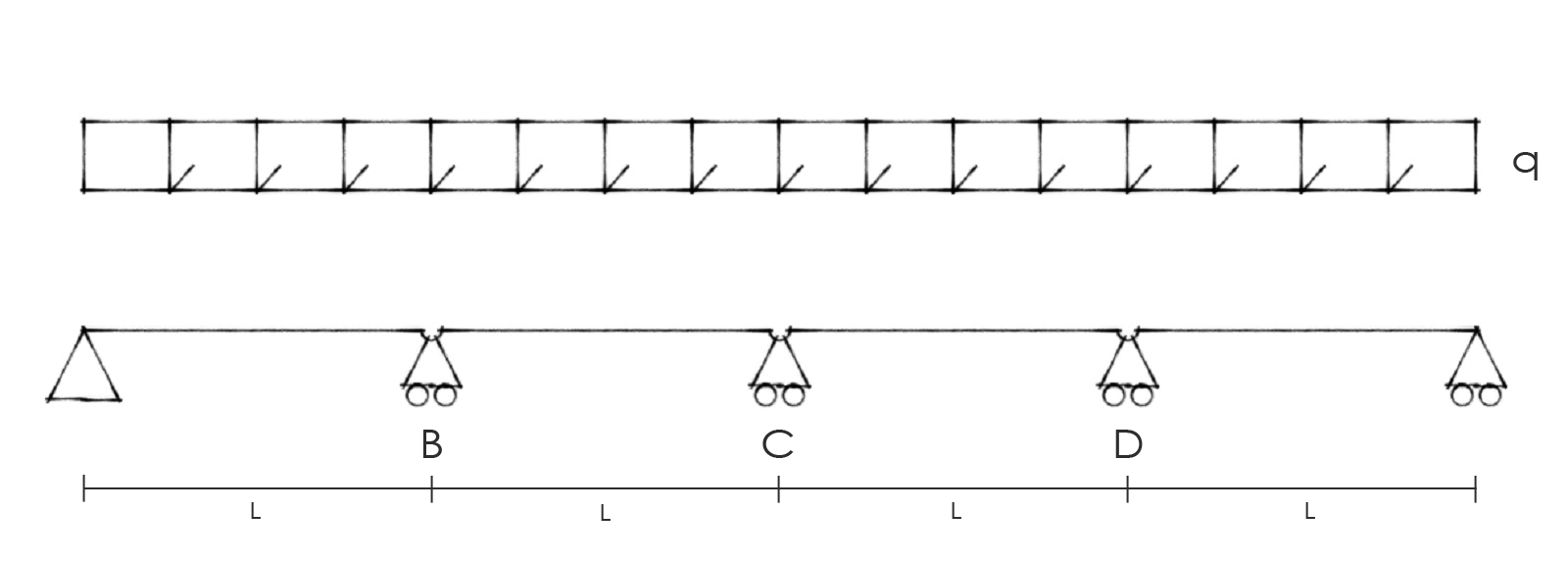
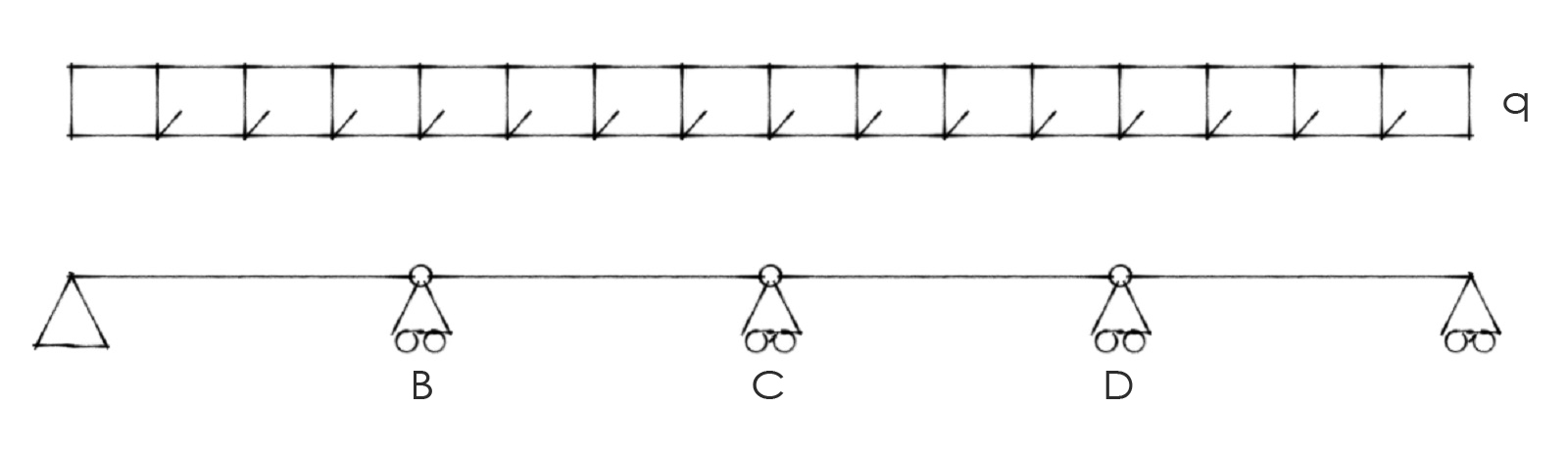
Passando alla parte operativa, il dimensionamento riguarderà il solaio rappresentato in figura e in particolare la trave più sollecitata, ossia quella con la maggiore area di influenza. Per poter fare un raffronto circa l’incidenza di quest’ultimo parametro si procederà anche al calcolo dell’altezza per una sezione con area di influenza minore e l’intero iter verrà ripetuto per i 3 diversi materiali.
LEGNO
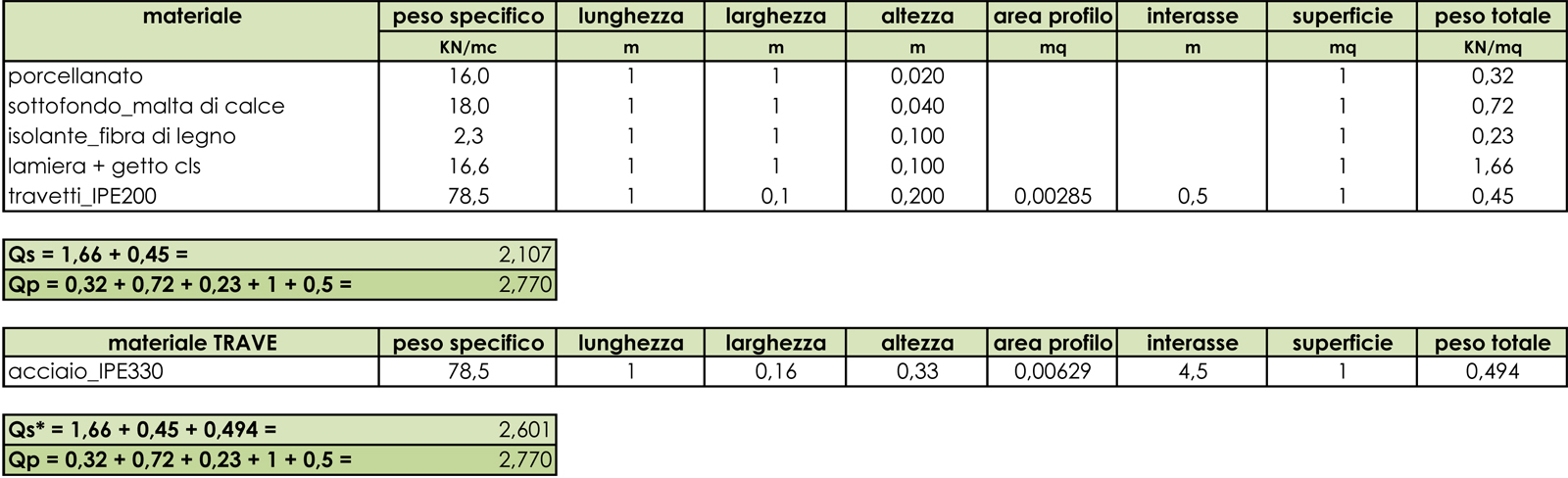
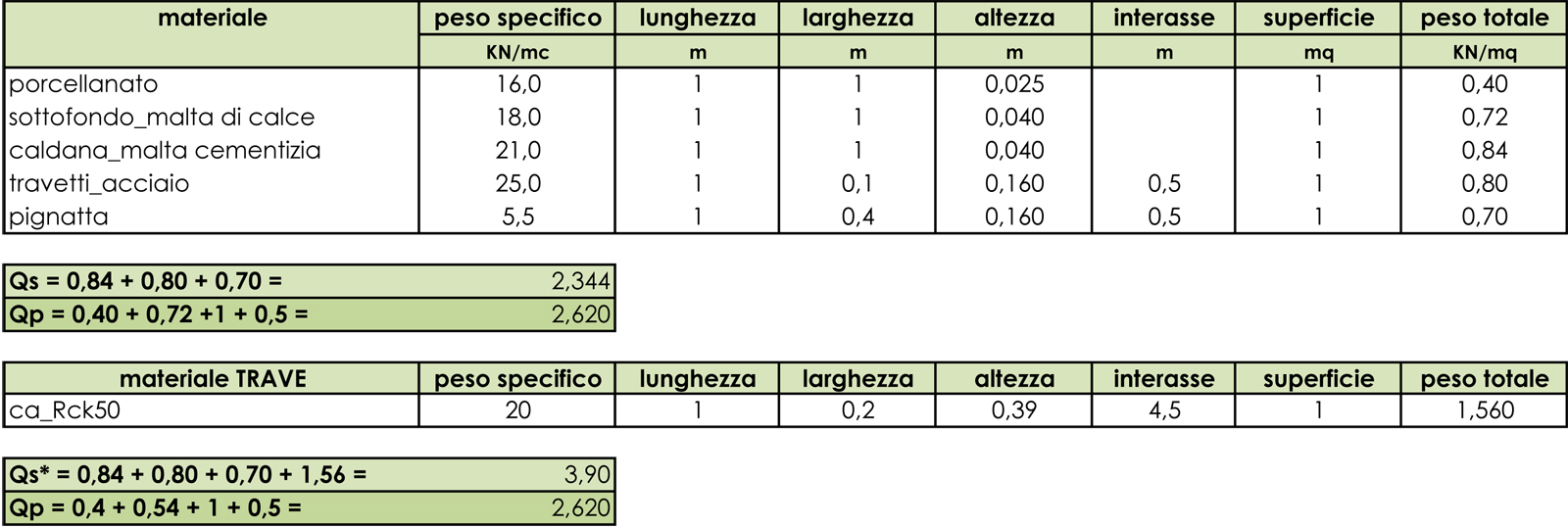
Il legno rappresenta il caso più semplice dei 3. Il primo passo consiste nella definizione del pacchetto che compone il solaio e nell’analisi dei carichi che la trave dovrà sopportare. Ogni strato è caratterizzato da un materiale e dal relativo Peso Specifico (KN/m3). Dal momento che il risultato che cerchiamo è un carico distribuito (KN/m2), moltiplichiamo il peso specifico per la lunghezza e la larghezza considerate, oltre che per lo spessore del singolo strato. Infine, dividiamo per la superficie analizzata.


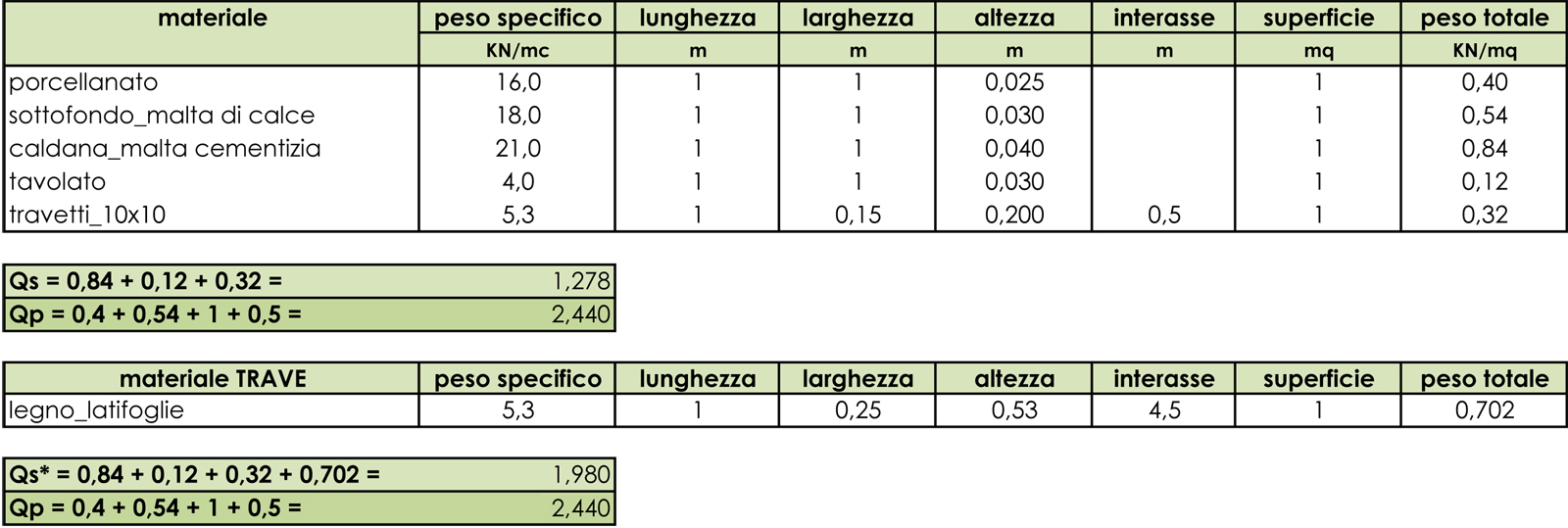
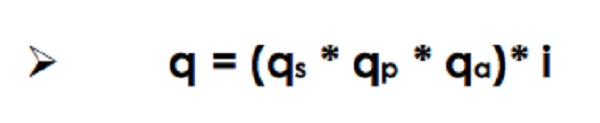
Una volta ottenuto il peso di ognuno degli strati componenti il solaio, li combino per avere il carico totale q, dato dalla somma dei carichi strutturali qs, dei carichi permanenti non strutturali qp(ai quali aggiungiamo sempre 1 KN/m2per gli impianti e 0,5 KN/m2 per i tramezzi) e dei carichi accidentali qa, relativi alla destinazione d’uso degli ambienti (nel nostro caso 2 KN/m2 destinazione residenziale), tutti moltiplicati per l’interasse i legato all’area d’influenza della trave.
NB:dopo aver dimensionato una prima volta la trave calcolo anche il suo peso proprio, ottenendo un carico strutturale qs* maggiore di quello precedente per il quale ridimensiono la trave ottenendo un’altezza h maggiore.
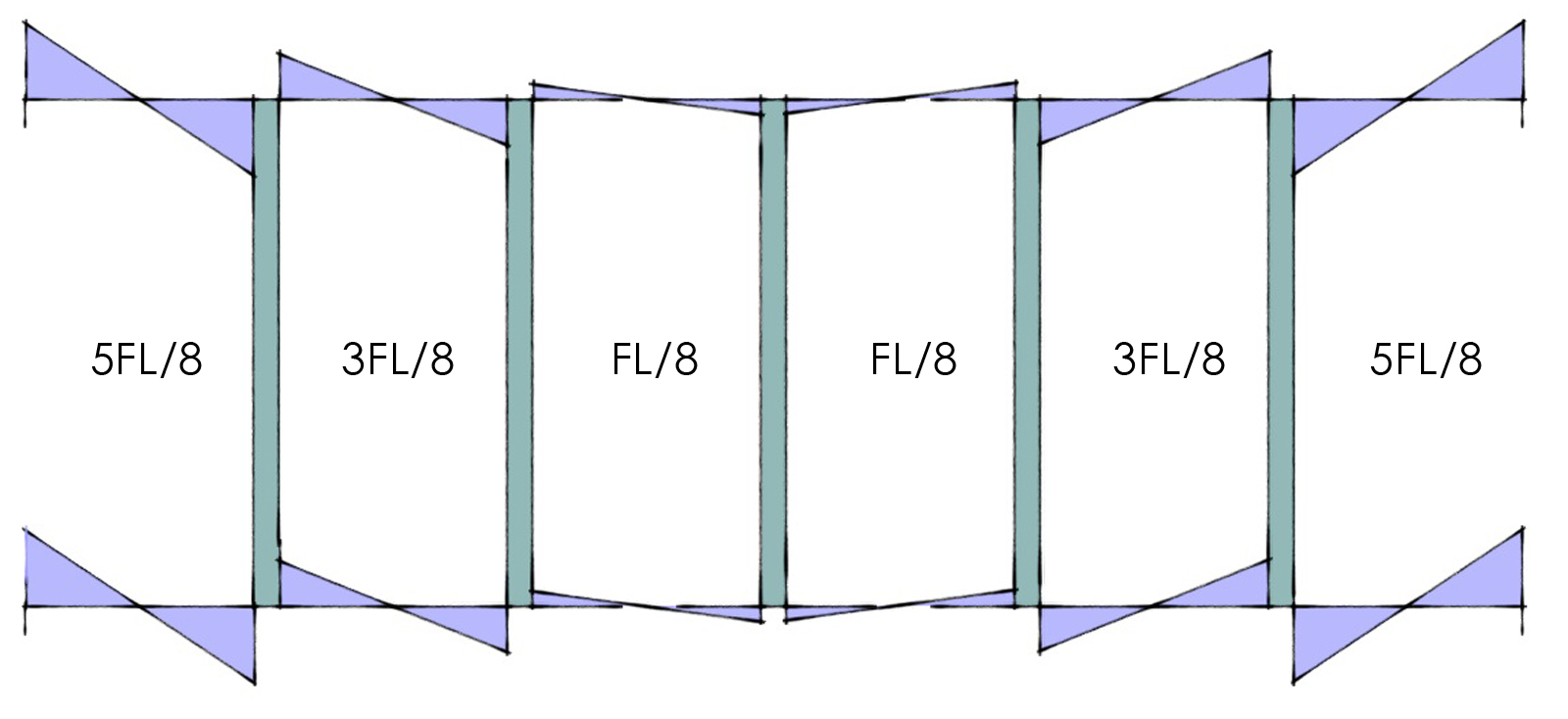
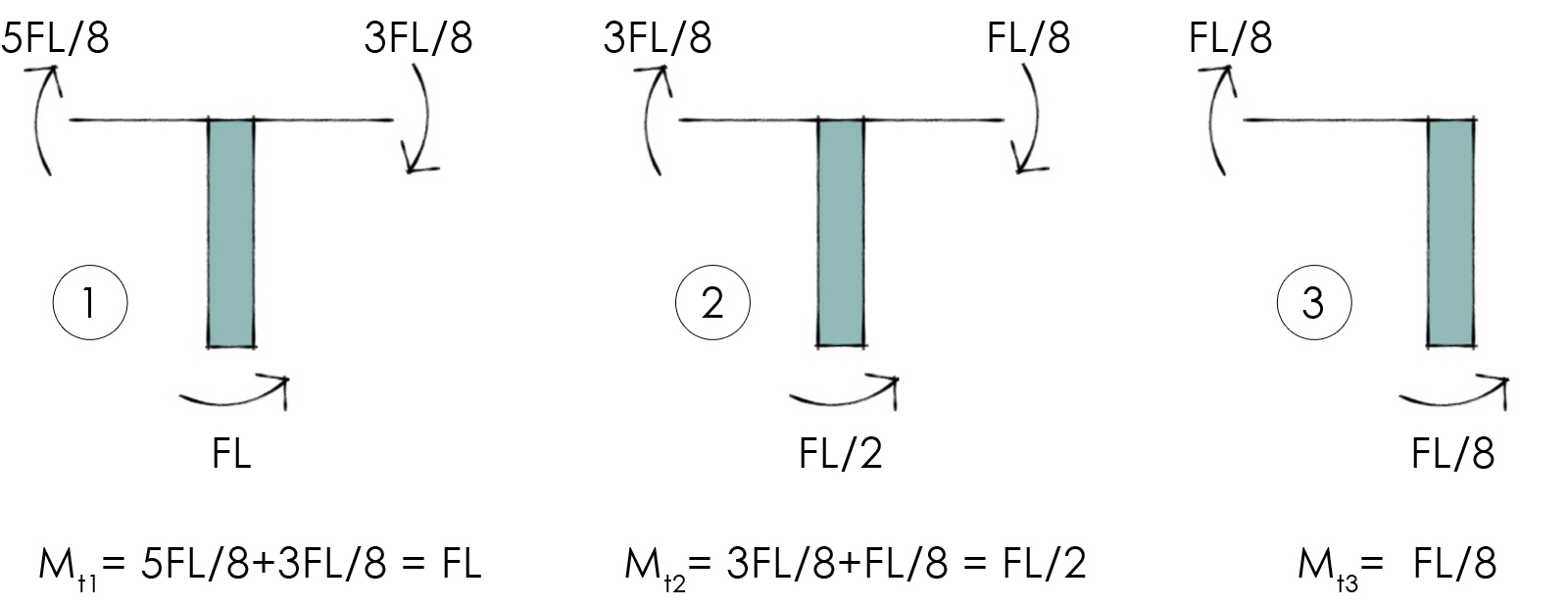
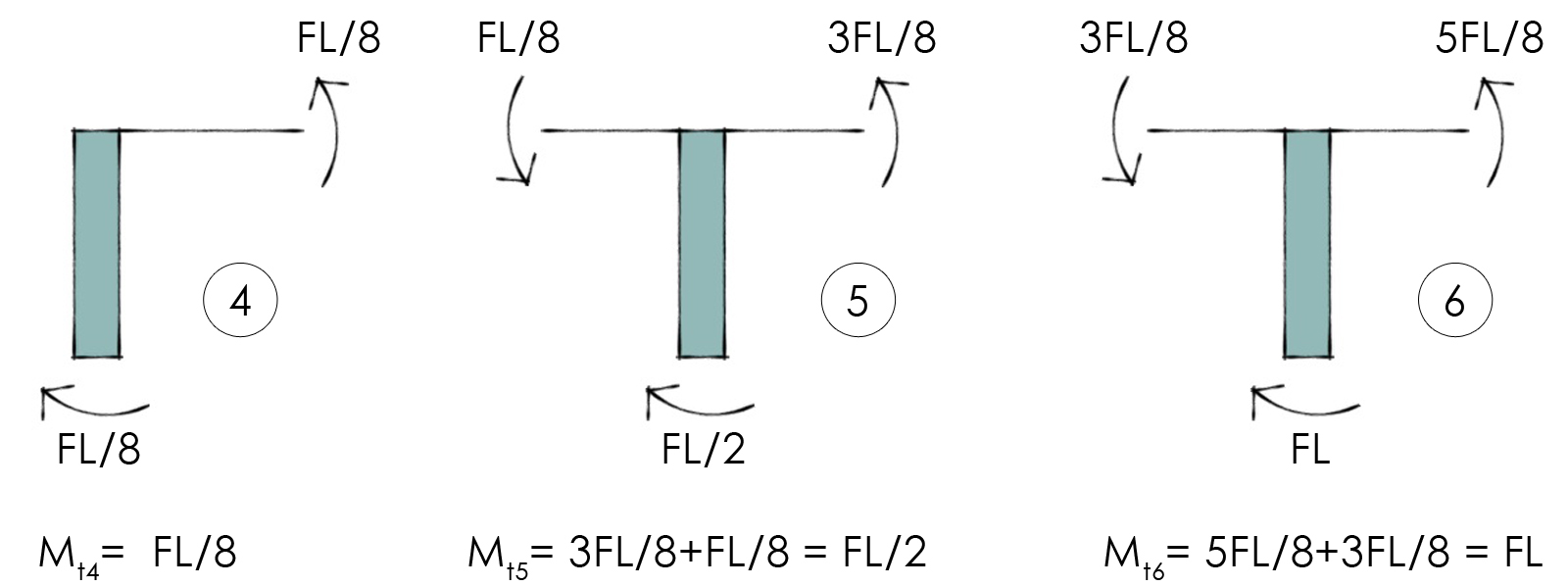
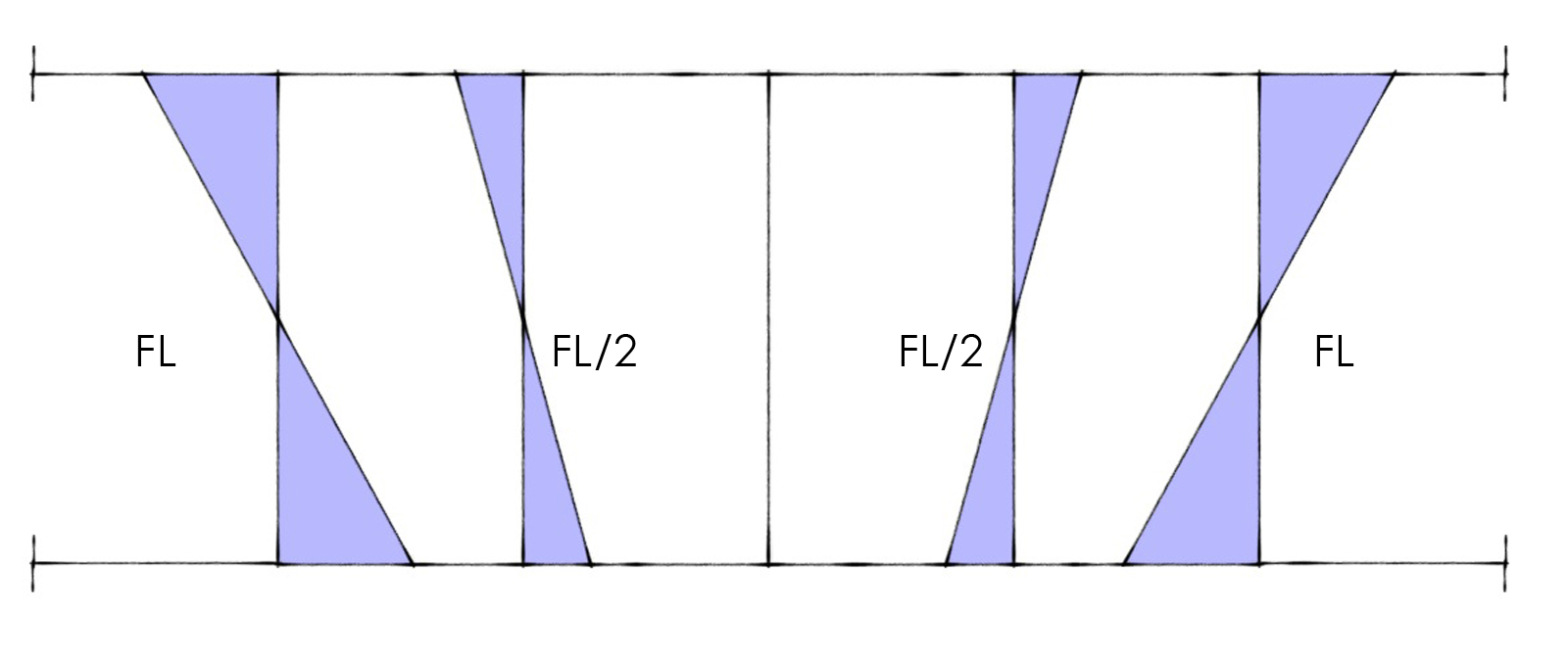
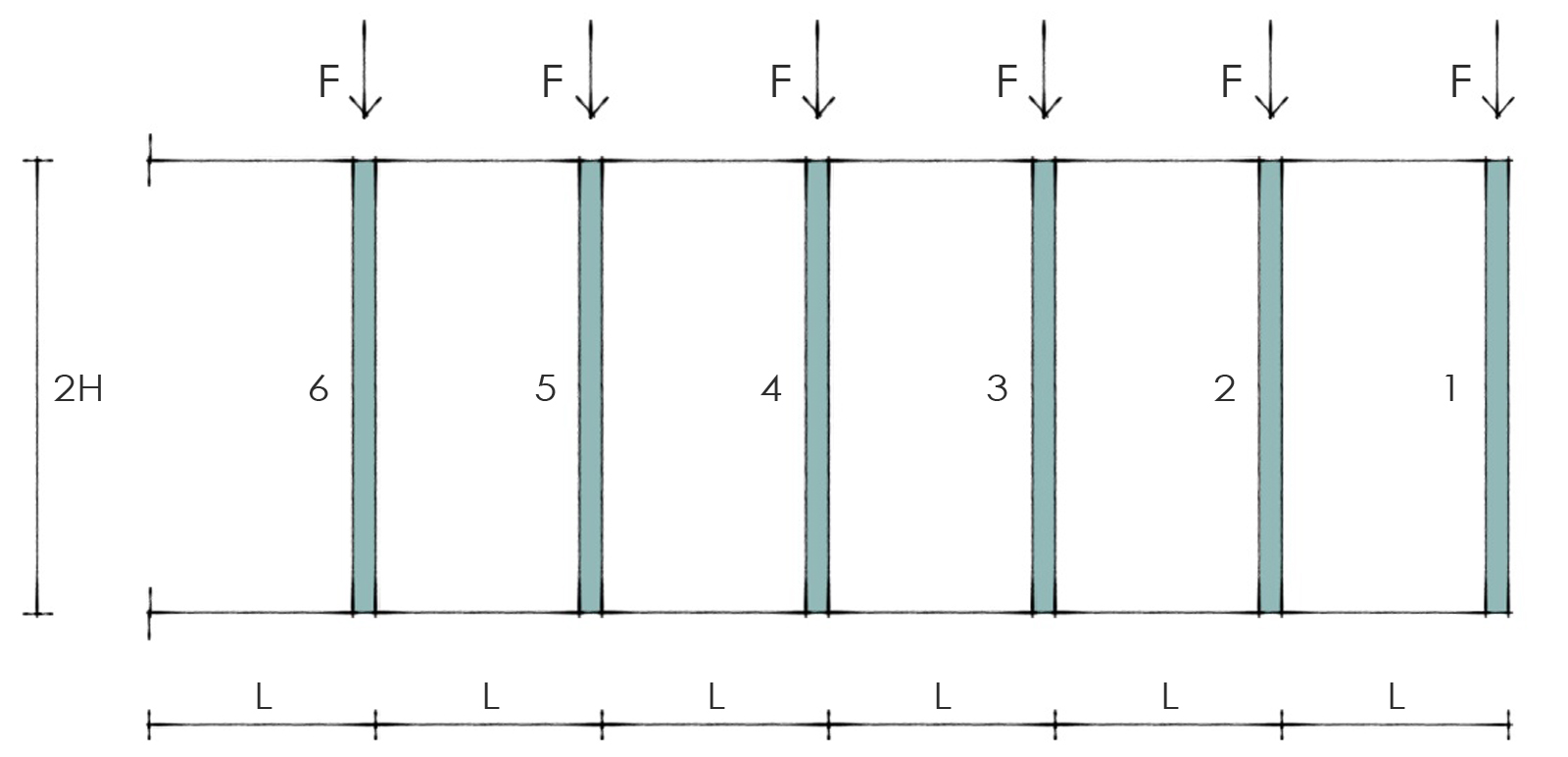
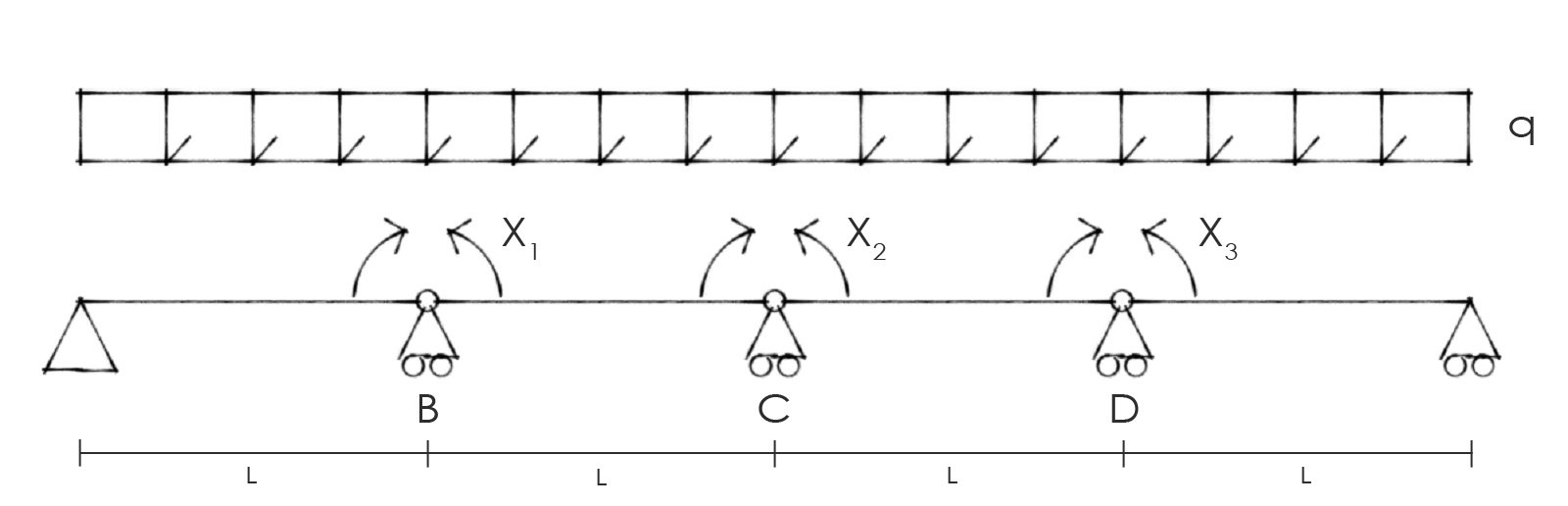
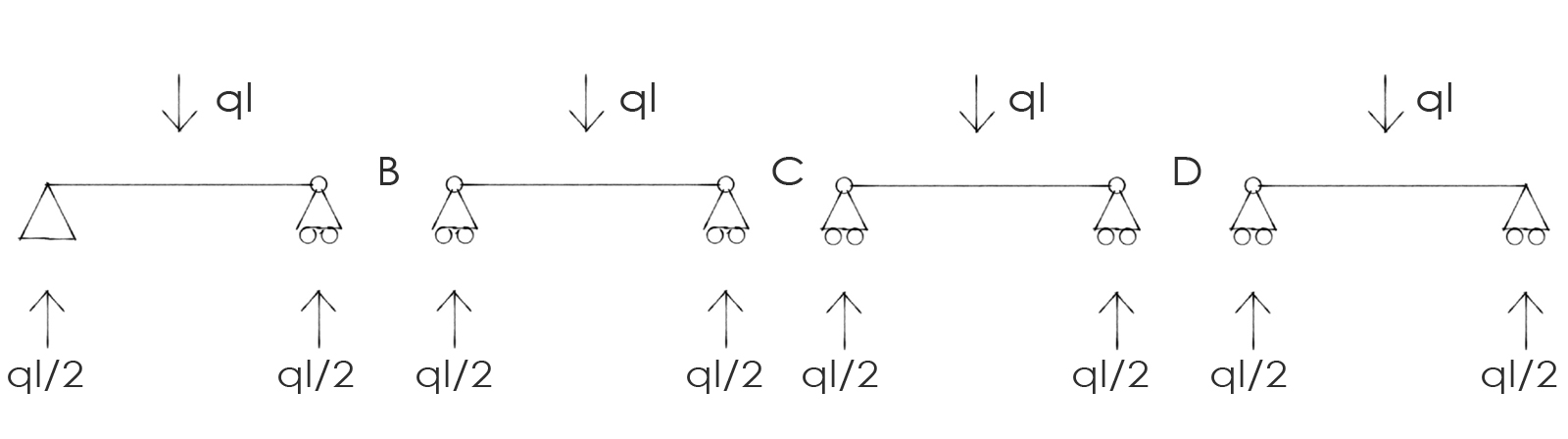
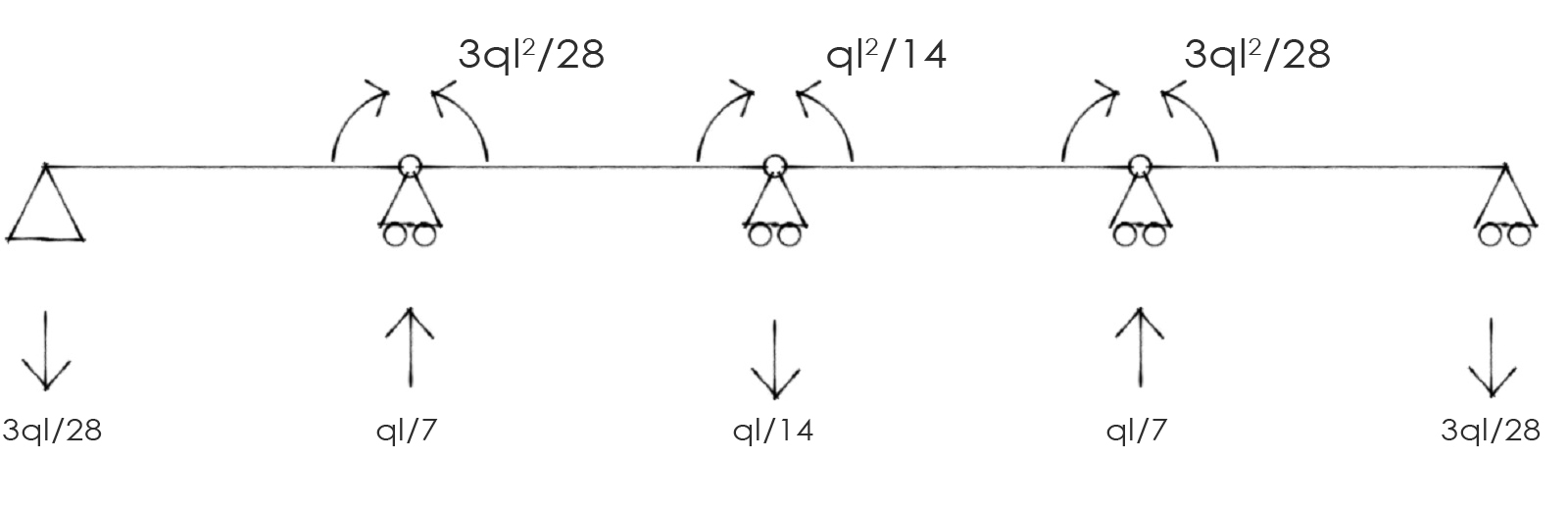
Ottenuto il carico totale q, sono in grado di calcolare il momento flettente M agente sulla trave, considerando il sistema statico equivalente ad una trave doppiamente appoggiata con momento flettente massimo pari a ql2/8. L ovviamente si riferisce alla luce della trave presa in esame.
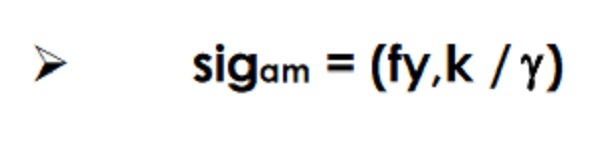
Per quanto riguarda la tensione sigam, questa dipende dal tipo di legno scelto e, più in generale, è data dal prodotto del coefficiente riduttivo kmod (normato, tiene conto della durata del carico e della classe di servizio del progetto)e della resistenza a flessione caratteristica fm,k, ulteriormente ridotta dal coefficiente di sicurezza gamma (nel legno lamellare pari a 1,45).

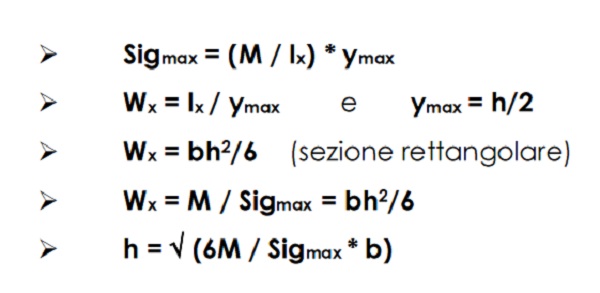
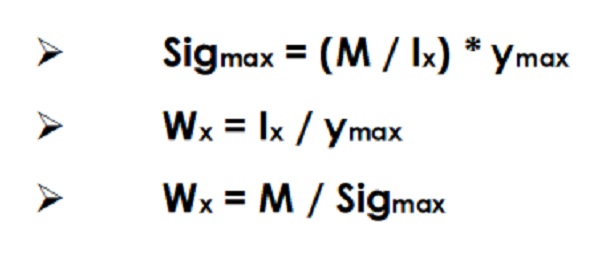
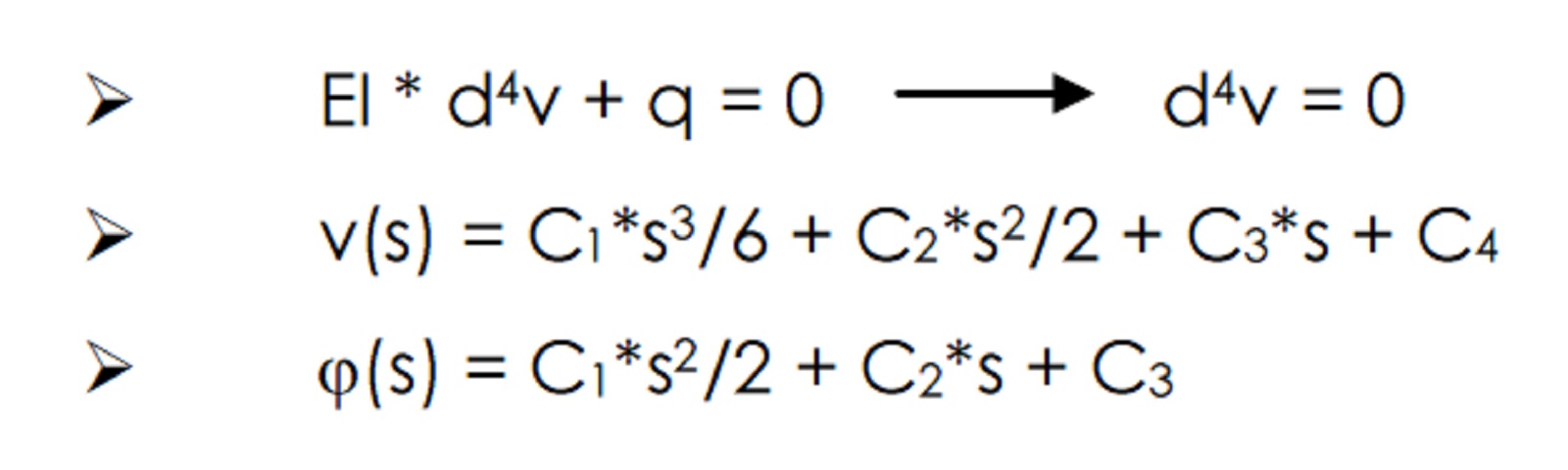
L’ultimo passaggio sfrutta la Formula di Navier, in quanto da essa possiamo ricavarci il modulo di resistenza W e, dopo aver posto la tensione sigma massima pari a quella ammissibile, anche l’altezza h che cercavamo.

NB:I primi 2 valori di h si riferiscono rispettivamente alla trave più sollecitata (i = 4,5 m) e ad una qualsiasi (i = 2,25 m), con il carico strutturale qs ; mentre gli altri 2 sono riferiti alle medesime travi, ma con un carico strutturale qs* che tiene conto del peso proprio della trave.
ACCIAIO
Per quanto concerne l’acciaio la prima parte relativa all’analisi dei carichi è identica a quella precedente. Si procede sempre alla definizione della stratigrafia e al calcolo del peso totale di ogni strato, al fine di sommarli poi per ottenere il carico totale q.
NB:dopo aver dimensionato una prima volta la trave calcolo anche il suo peso proprio, ottenendo un carico strutturale qs* maggiore di quello precedente per il quale ridimensiono la trave ottenendo un’altezza h maggiore.
Anche il calcolo del momento flettente M non riporta differenze rispetto al calcolo precedente.
Lo stesso non si può dire per la tensione: nel caso dell’acciaio abbiamo differenti valori di resistenza caratteristica fy,k, a seconda del tipo di acciaio utilizzato (nel nostro caso abbiamo usato 3 diversi acciai con fy,k pari 235, 275 e 355). La tensione sigam è uguale a quella caratteristica fy,k ridotta dividendo per il solito coefficiente di sicurezza gamma, il quale per l’acciaio da carpenteria è pari a 1,15.
Il passo finale si fonda sempre sulla Formula di Navier, ma paradossalmente è più semplice rispetto al legno: è sufficiente porre sempre la tensione sigma massima uguale a quella ammissibile e ricavarsi il modulo di resistenza Wx minimo; successivamente occorre cercare sul profilario il primo profilo con modulo di resistenza superiore a quello trovato.
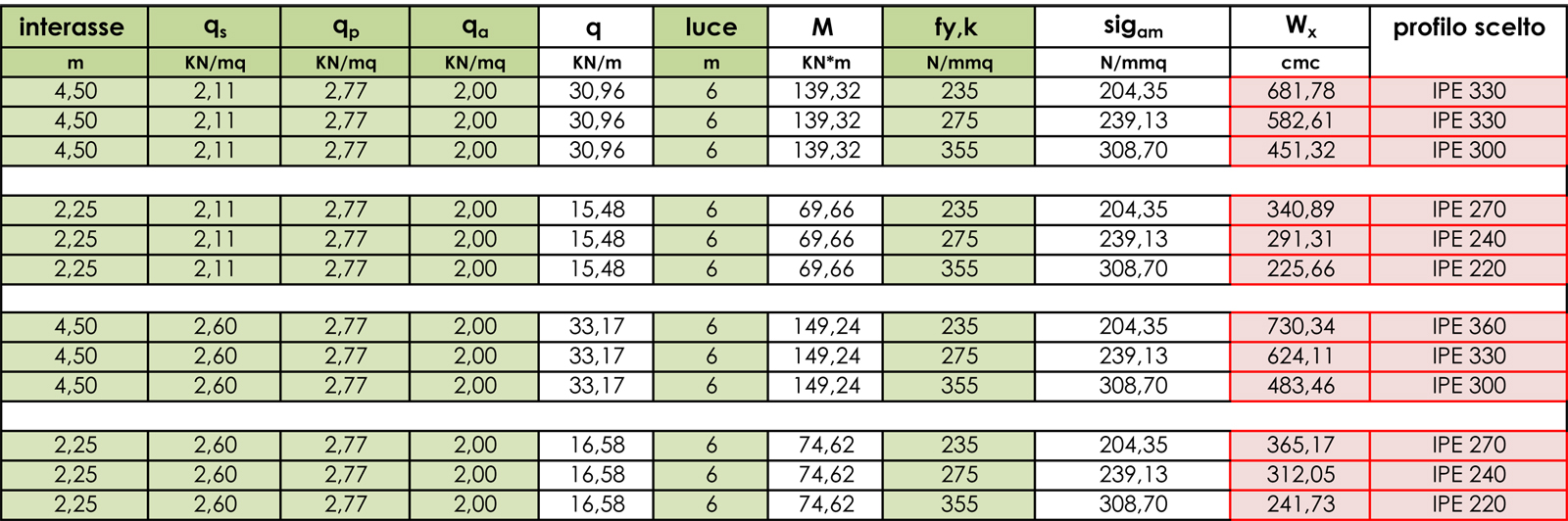
NB:I primi 3 valori di Wx con relativo profilo IPE si riferiscono alla trave più sollecitata (i = 4,5 m), con il carico strutturale qs e tensioni fy,k crescenti; mentre i successivi 3 sono riferiti ad una trave qualsiasi (i = 2,25 m), sempre un carico strutturale qs e tensioni crescenti; i 3 seguenti si riferiscono alla trave più sollecitata, con carico strutturale qs* che tiene conto del carico proprio della trave, e gli ultimi 3 ad una trave qualsiasi sempre con carico strutturale qs*.
CEMENTO ARMATO
Anche per il cemento armato la parte relativa alla stratigrafia del solaio e all’analisi dei carichi non subisce variazioni.
NB:dopo aver dimensionato una prima volta la trave calcolo anche il suo peso proprio, ottenendo un carico strutturale qs* maggiore di quello precedente per il quale ridimensiono la trave ottenendo un’altezza h maggiore.

Anche il calcolo del momento flettente M non riporta differenze rispetto al calcolo precedente.
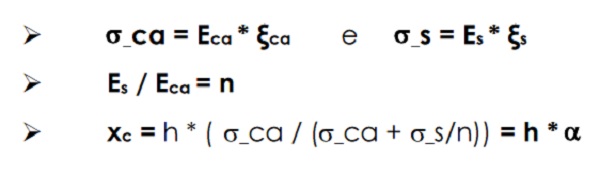
Per quanto riguarda la tensione, a seconda del cls precelto, avremo una tensione sig_ca data dalla resistenza caratteristica fy, moltiplicata per un coefficiente riduttivo alfacc pari a 0,85 e divisa per il coefficiente riduttivo gamma pari a 1,5.

L’ultimo passaggio in questo caso è più complicato poiché bisogna tener conto del fatto che il materiale non è omogeneo, ma è composto da due materiali diversi (cls e acciaio) con tensioni e deformazioni differenti. Il tutto va, quindi, “omogeneizzato”, mediante un coefficiente di omogeneizzazione n.
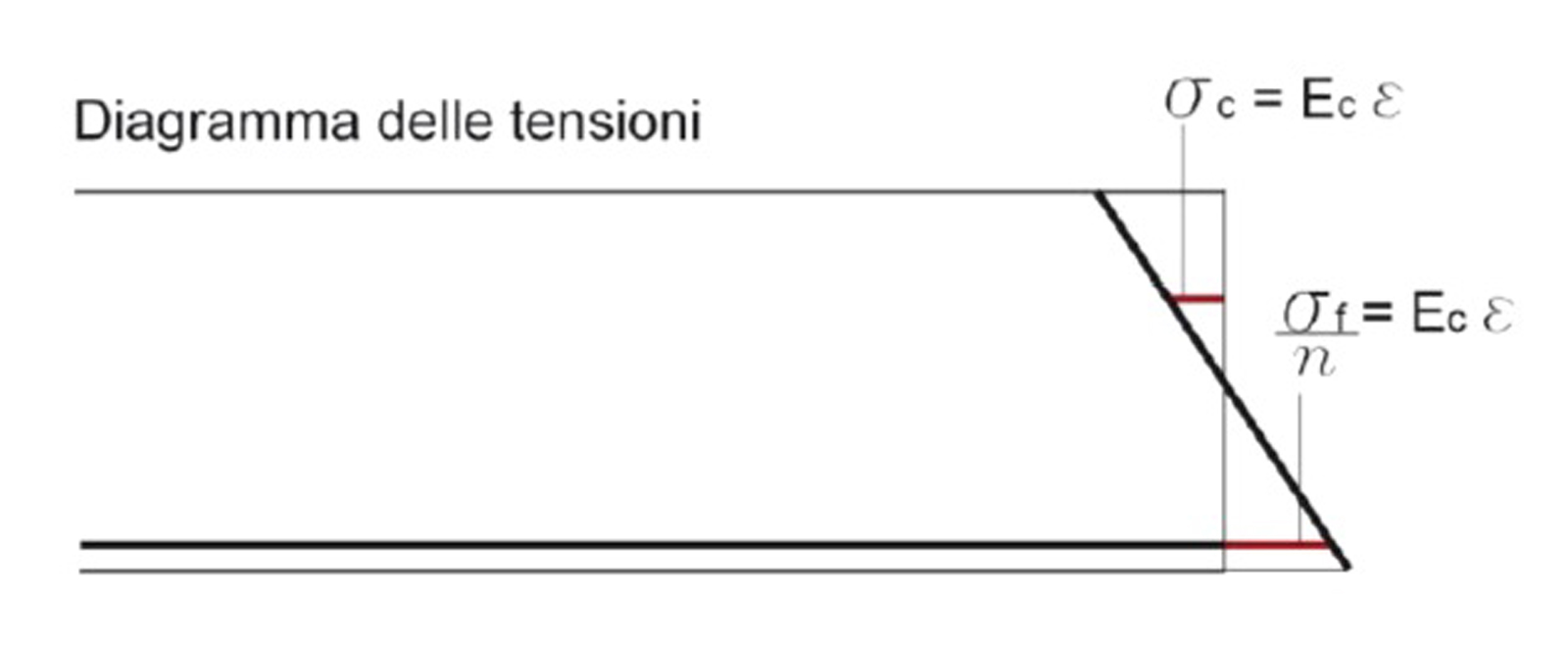
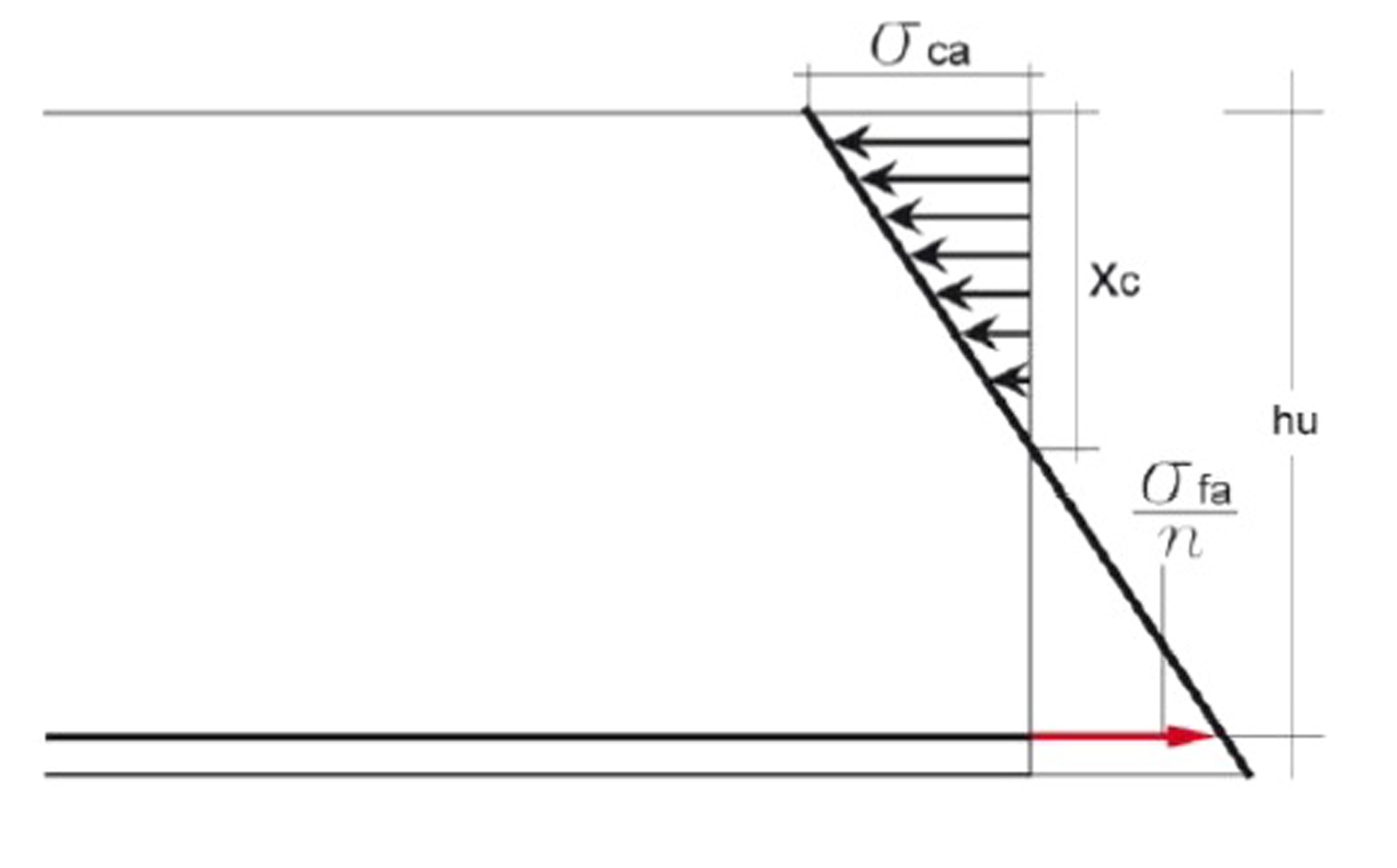
Una volta omogeneizzati i materiali e le rispettive tensioni, poniamo queste uguali alla tensione ammissibile e esplicitiamo xc in funzione della nostra incognita h, sfruttandoproprietà dei triangoli simili. Così facendo ci imbattiamo in un altro parametro fondamentale, ossia alfa.
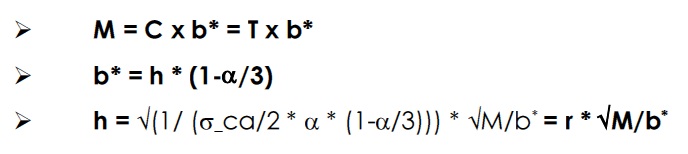
A questo punto sappiamo che il momento flettente M è dato da una coppia: la compressione C relativa al calcestruzzo e la trazione T relativa all’armatura d’acciaio.
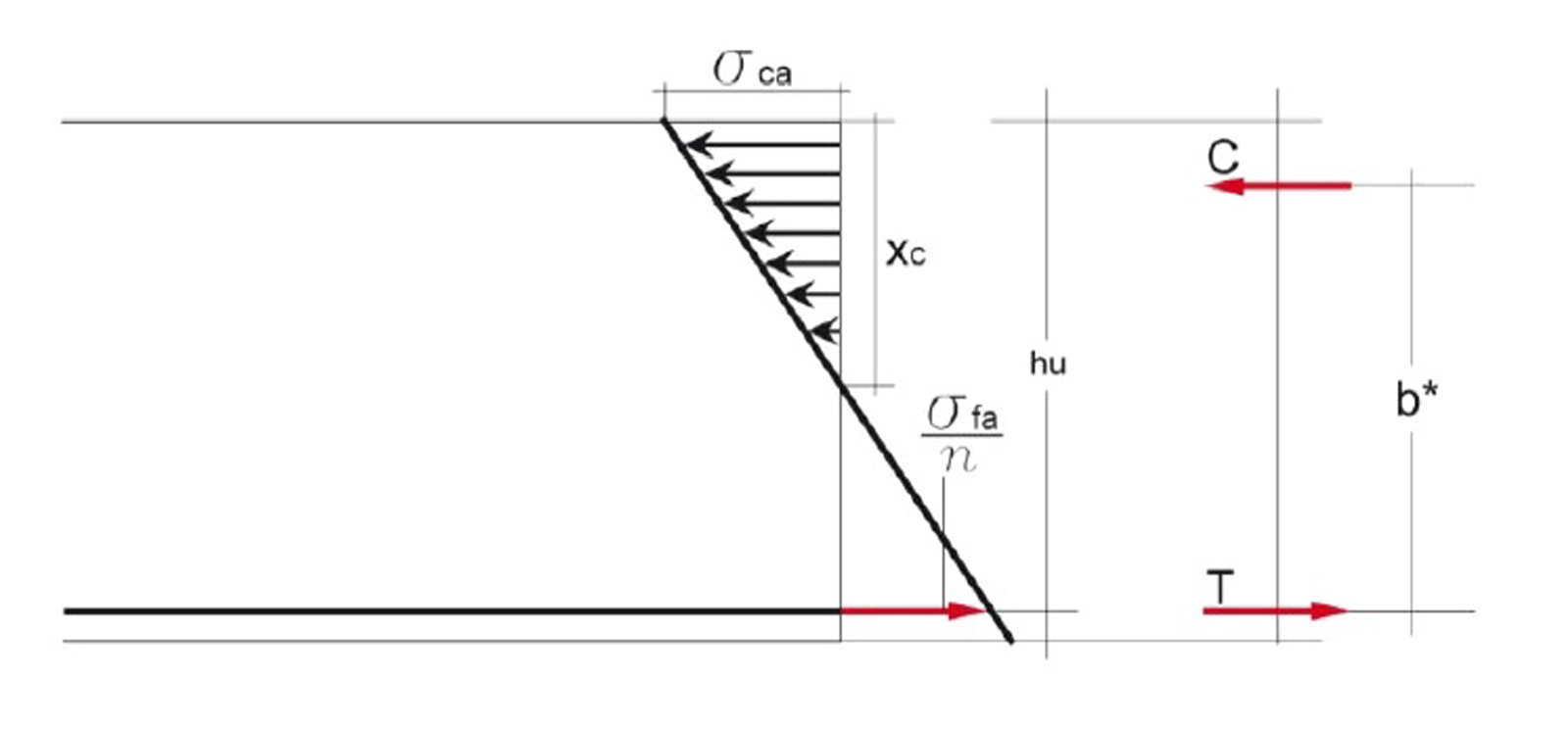
Eguagliando i momenti dati dal prodotto di queste due forze con il braccio b* possiamo esplicitare l’altezza h (hu nell’immagine sopra) che stiamo cercando.

NB:I primi 3 valori di H si riferiscono alla trave più sollecitata (i = 4,5 m), con il carico strutturale qs e tensioni Rck crescenti; mentre i successivi 3 sono riferiti ad una trave qualsiasi (i = 2,25 m), sempre un carico strutturale qs e tensioni crescenti; quello seguente si riferisce alla trave più sollecitata, con Rck pari a 50 e carico strutturale qs* che tiene conto del carico proprio della trave, mentre l’ultimo ad una trave qualsiasi sempre con carico strutturale qs* e Rck 50.

































.jpg)
Commenti recenti