Possiamo parlare di graticcio quando vi è collaborazione tra due sistemi ortogonali di travi. Va distinto dalla gerarchia di travi, nella quale c’è sempre un’orditura principale e una secondaria.
Ne graticcio non vi sono differenze nelle sezioni degli elementi, a prescindere dalla loro orditura e per questo motivo abbiamo momenti d’inerzia pressoché identici nei due assi x e y.
Un parametro che assume notevole importanza nel graticcio è la rigidezza torsionale, dal momento che avendo flessione in una direzione, inevitabilmente avremo torsione nell’altra. Il problema della Torsione è legata principalmente alla sezione dell’elemento strutturale poiché nella formula della rigidezza compare il Momento d’inerzia Polare (Ip), diverso a seconda della sezione in esame. Per questo motivo analizziamo un graticcio semplice, comparando i valori delle rotazioni indotte da una forza concentrata a travi di sezioni differenti. Va ricordato, infatti, che la rotazione è indirettamente proporzionale alla rigidezza.

RISOLUZIONE DI UN GRATICCIO
Il nodo ha 6 gradi di libertà: esso può avere 3 differenti traslazioni, secondo i 3 assi x, y e z; inoltre, può essere soggetto a rotazioni intorno ai 3 assi. In questo caso specifico, però, la condizione di carico non genera traslazioni lungo x e lungo y, così come non vi sono rotazioni in x e in z. Le incognite, dunque, sono soltanto due, ossia lo spostamento e la rotazione.
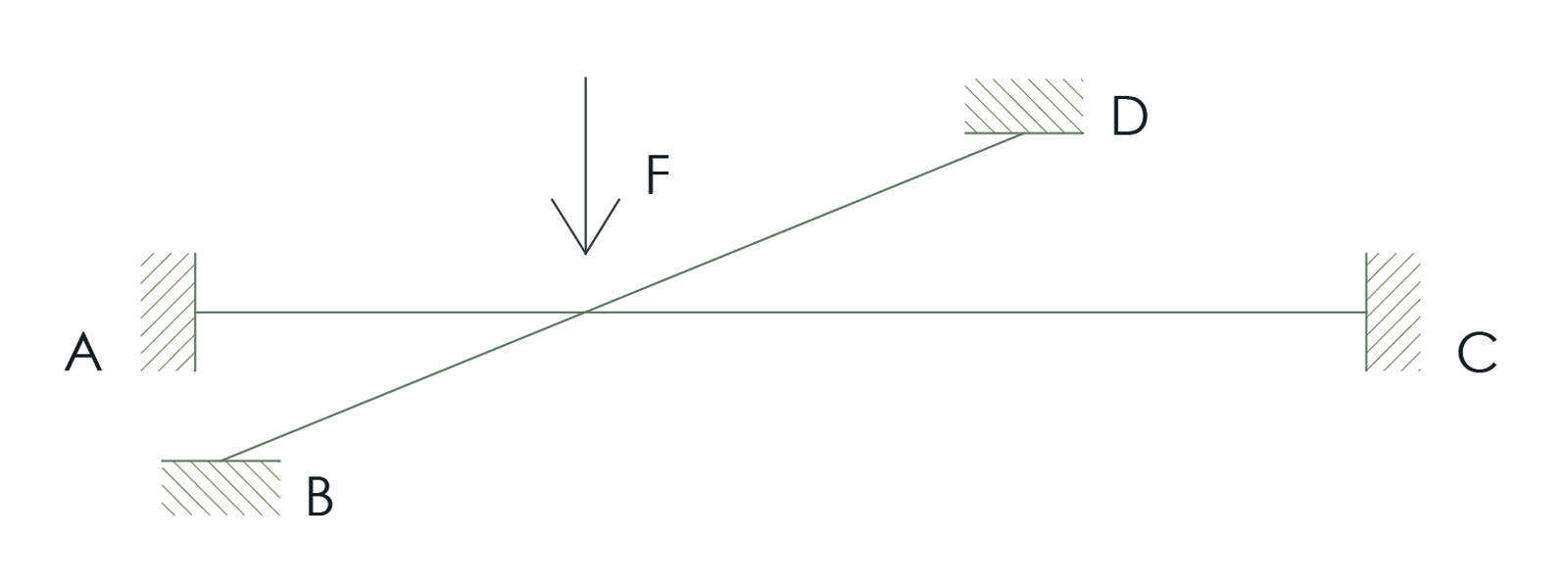
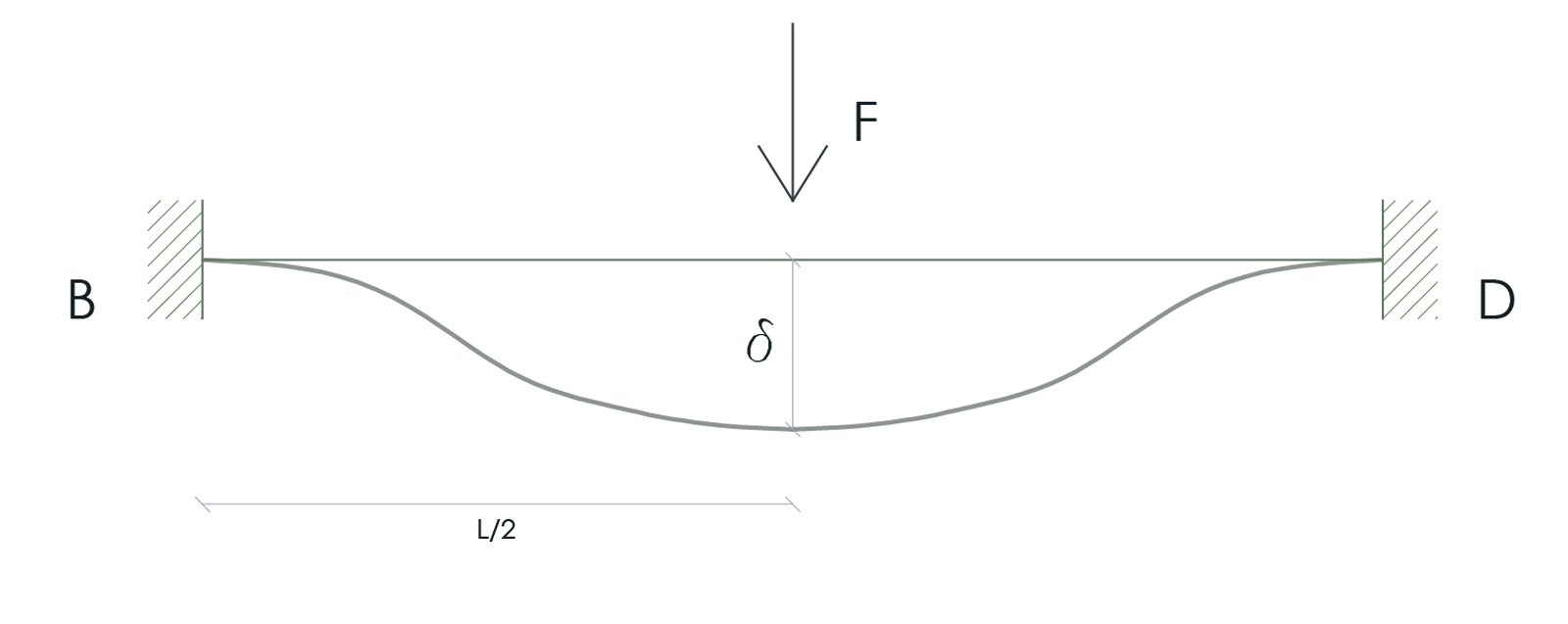
Analizziamo le deformate delle due travi separatamente:

Sulla trave BD la forza F agisce esattamente al centro, quindi la deformata è simmetrica e in quel punto abbiamo uno spostamento δ, ma nessuna rotazione della sezione essendo un punto di tangenza orizzontale. Sulla trave AC, invece, F agisce ad un terzo della lunghezza e, sebbene il punto trasli della stessa quantità lungo z, stavolta non ci troviamo nel punto a tangenza orizzontale della deformata, quindi avremo anche una rotazione della sezione intorno all’asse y.
Per questo motivo separiamo idealmente le due incognite, facendole agire separatamente e sovrapponendo poi i loro effetti.
Analizziamo innanzitutto le due deformate prodotte dalla spostamento δ:
-
deformazione dovuta solo allo spostamento δ per la trave AC:
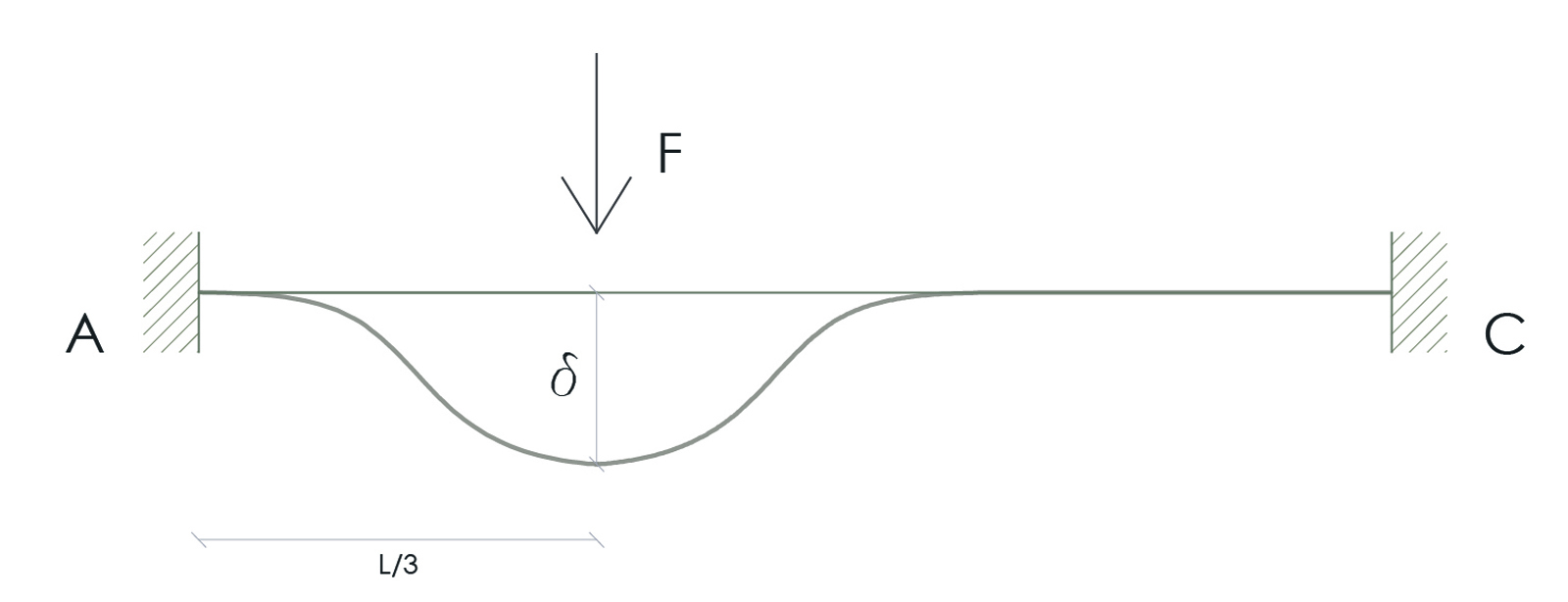
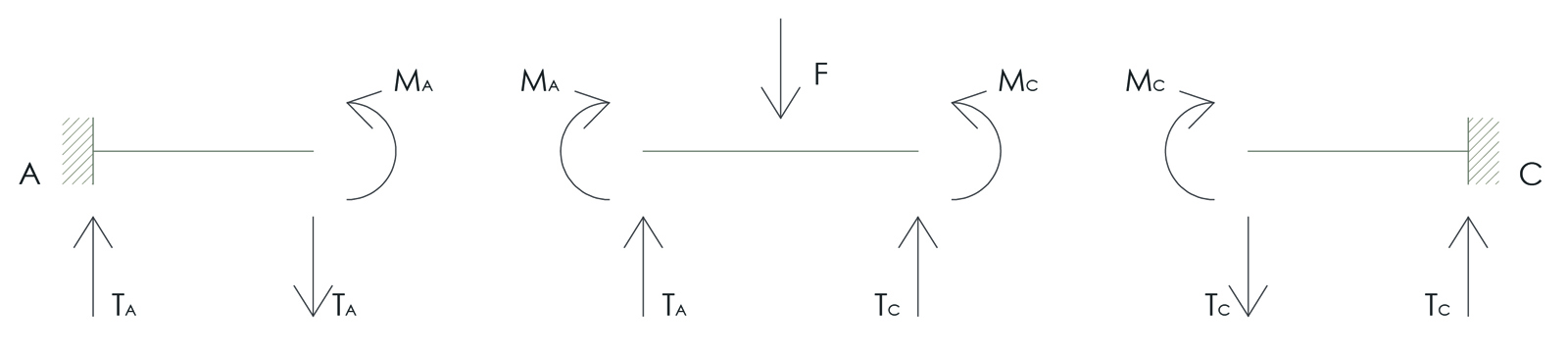
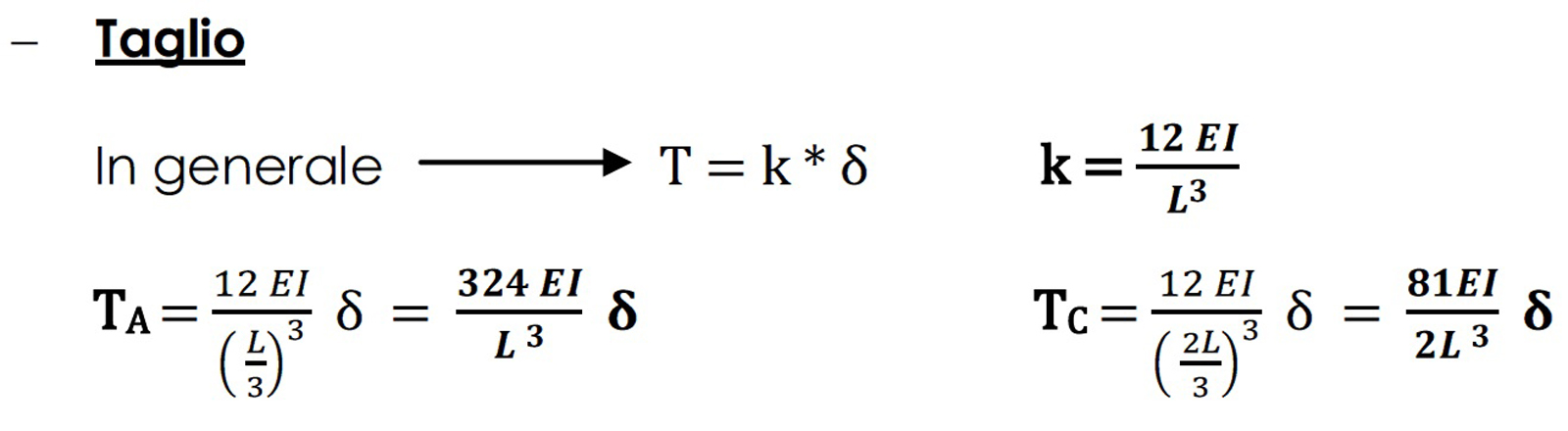
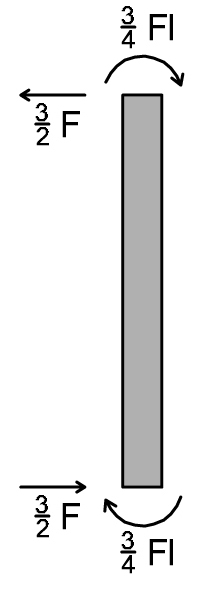
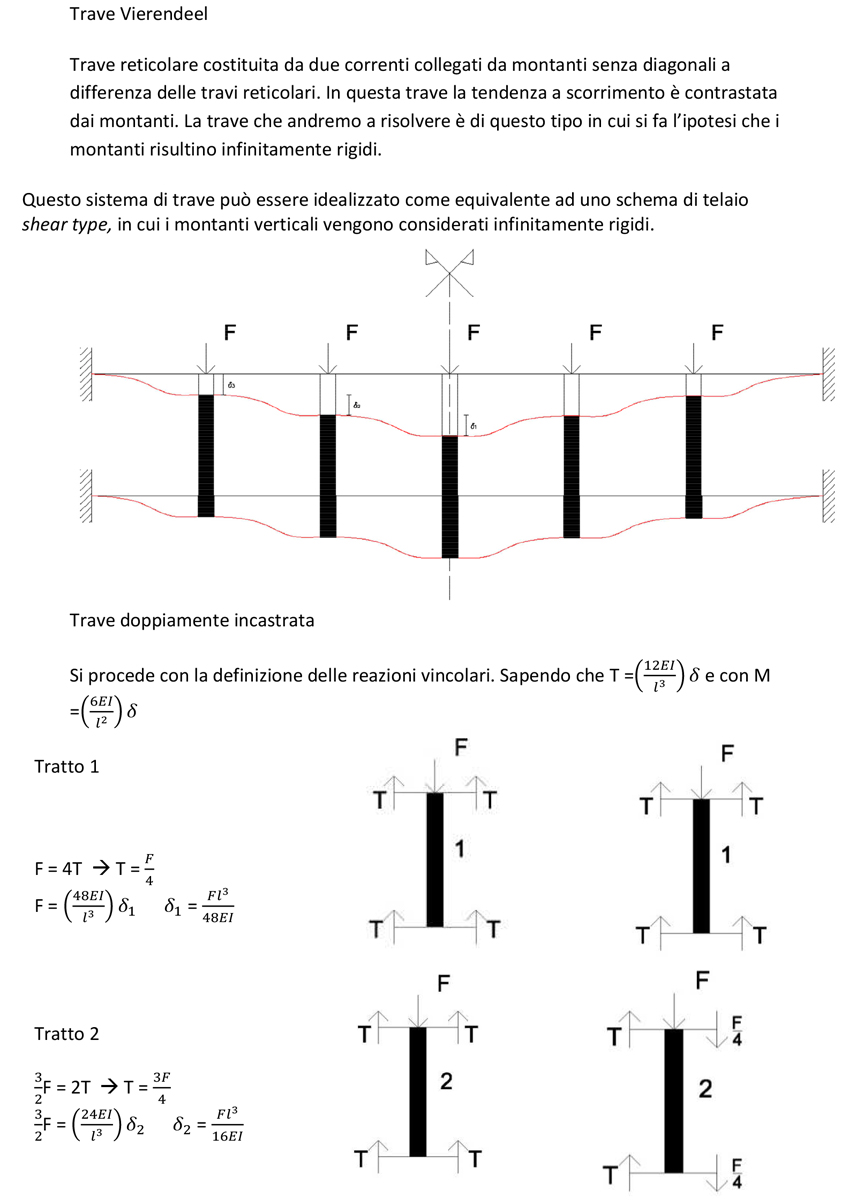
come detto in precedenza il punto soggetto alla forza F deve abbassarsi senza ruotare. Conoscendo già i valori della rigidezza in una trave doppiamente incastrata possiamo quantificare gli sforzi di Taglio e Momento flettente, concentrandoci in particolare su quelli che agiscono sul nodo:
-
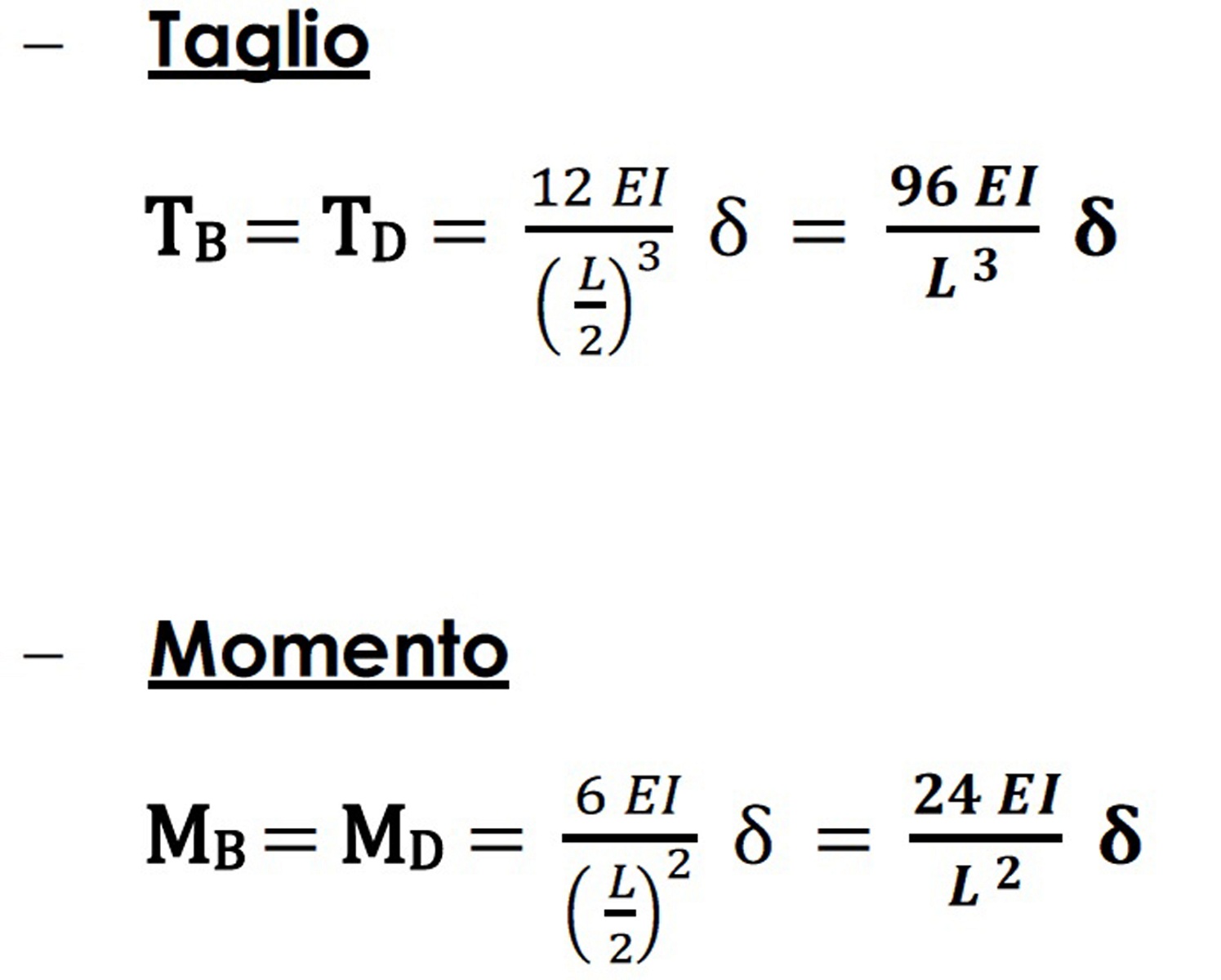
deformazione dovuta solo allo spostamento δ per la trave BD:
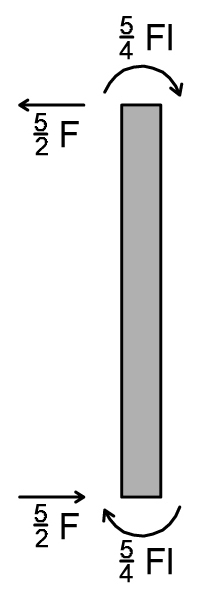
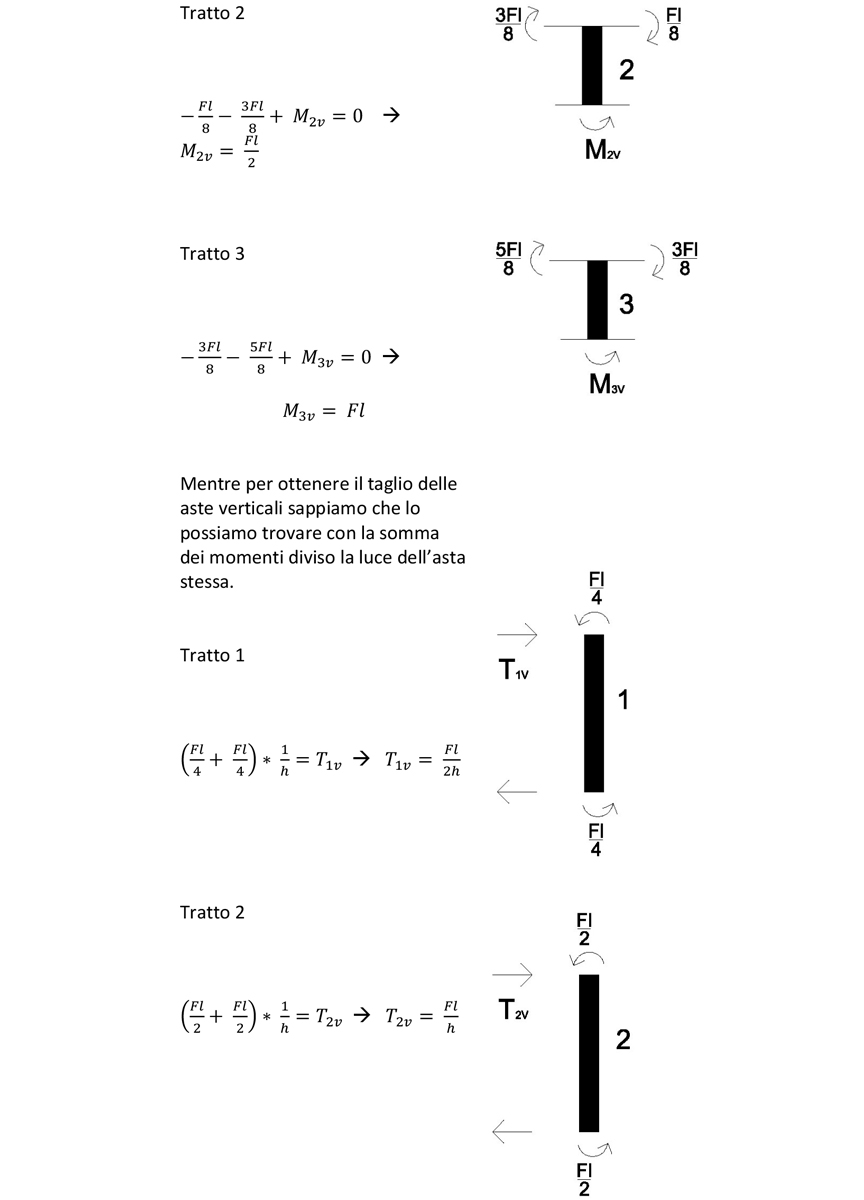
anche nell’asta BD soggetta alla sola traslazione il nodo si abbassa senza ruotare, quindi analogamente a quanto fatto in precedenza procediamo rapidamente al calcolo degli sforzi di Taglio e Momento Flettente, i quali per via della simmetria dello schema stavolta saranno identici:
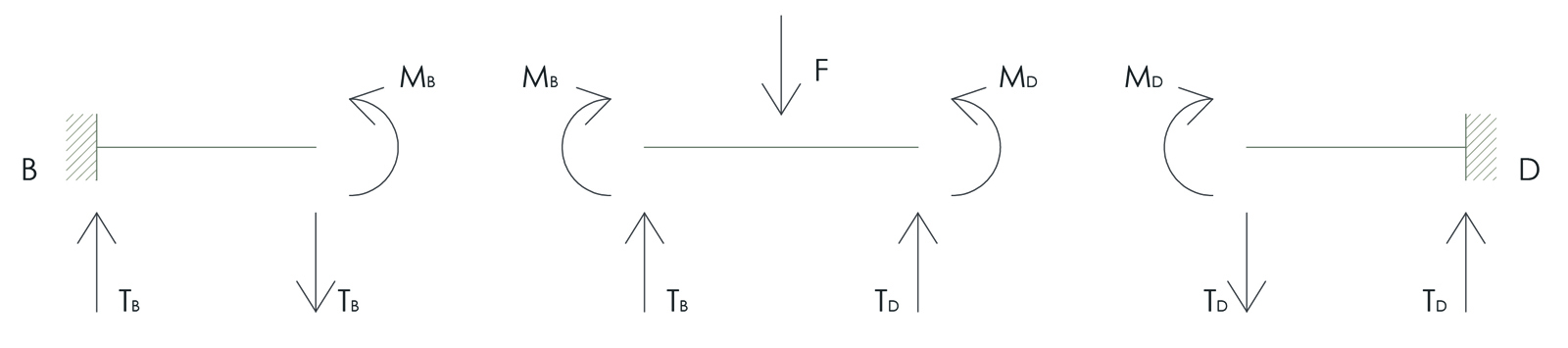
(questi due moment oltre ad elidersi perché uguali in valore assoluto e opposti nel verso, si riferiscono ad una rotazione attorno all’asse x, quindi non verranno presi in considerazione nell’equazione di equilibrio dei momenti)
A questo punto analizziamo le deformate provocate dalla sola rotazione:
-
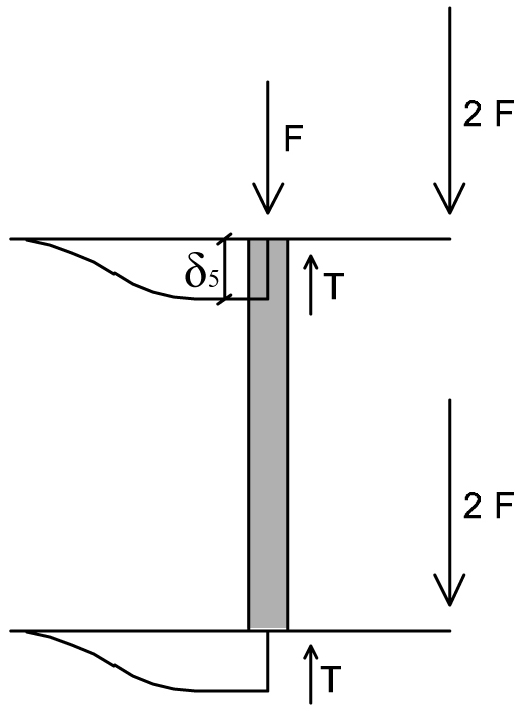
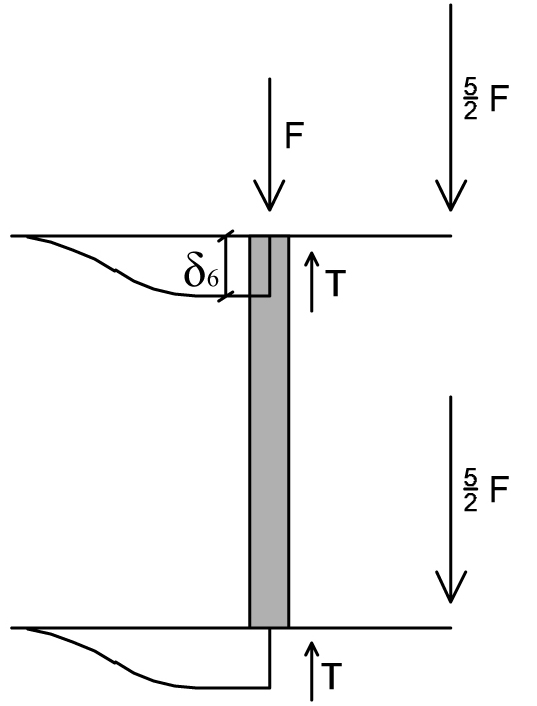
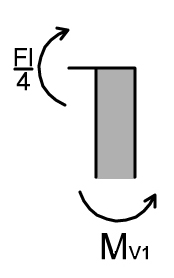
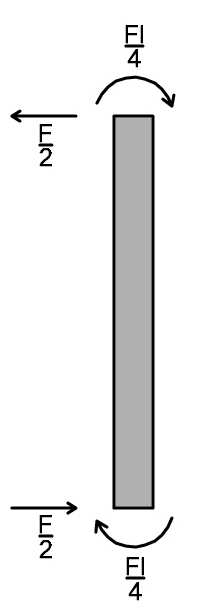
deformazione dovuta solo alla rotazione per la trave AC:
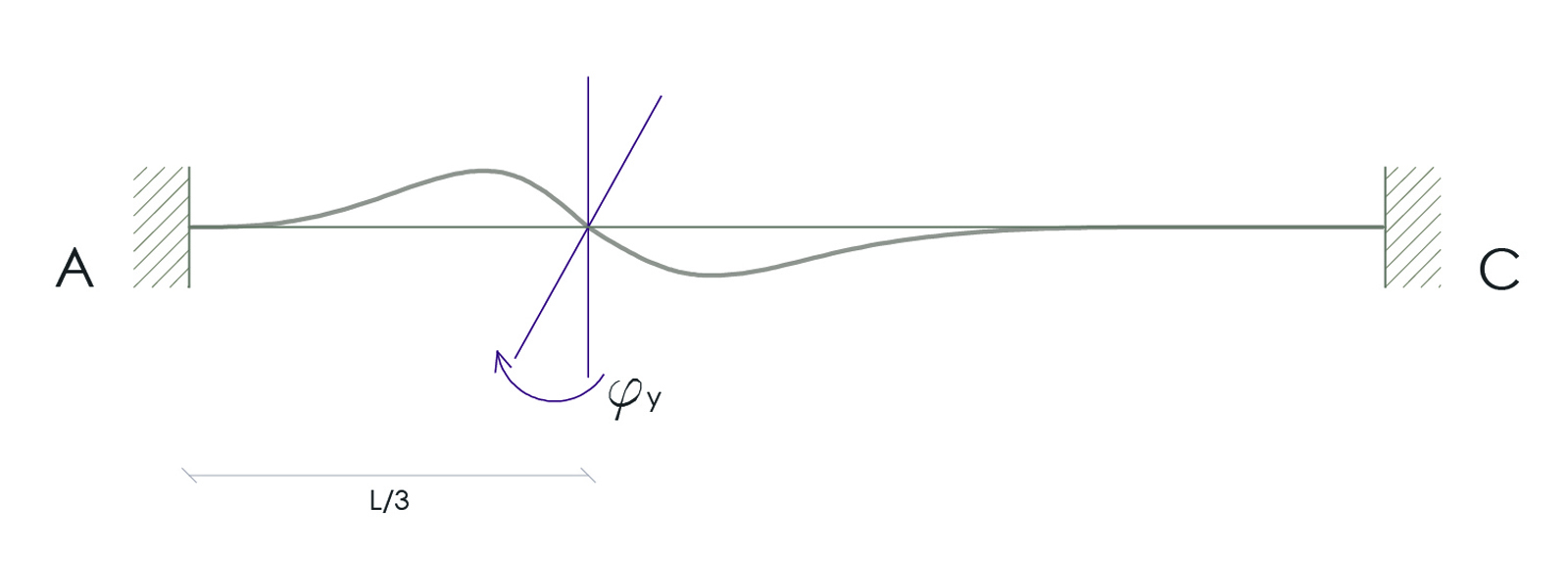
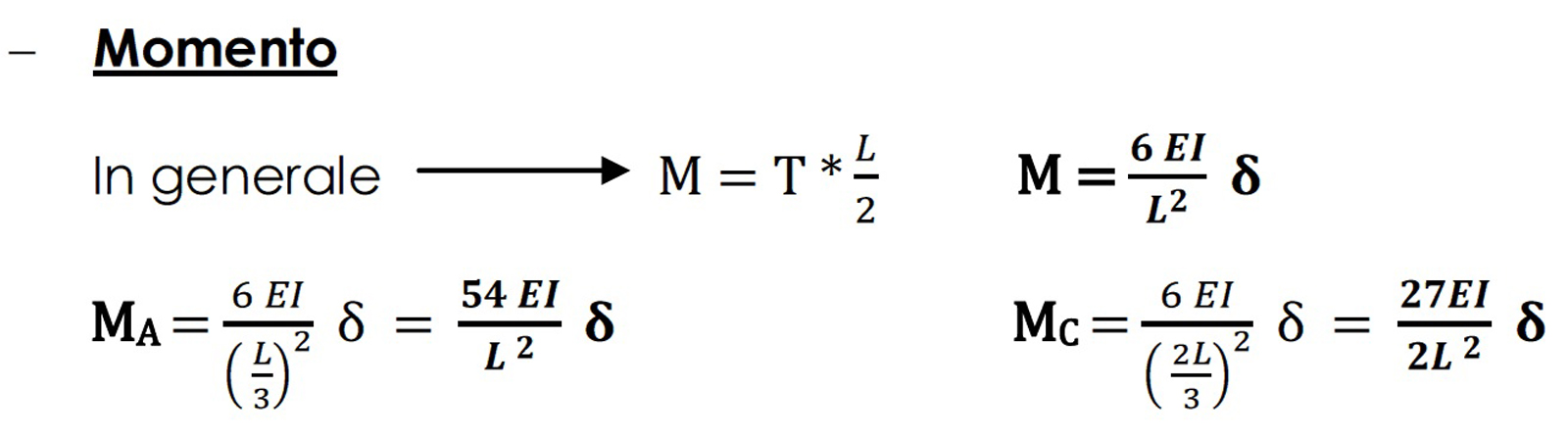
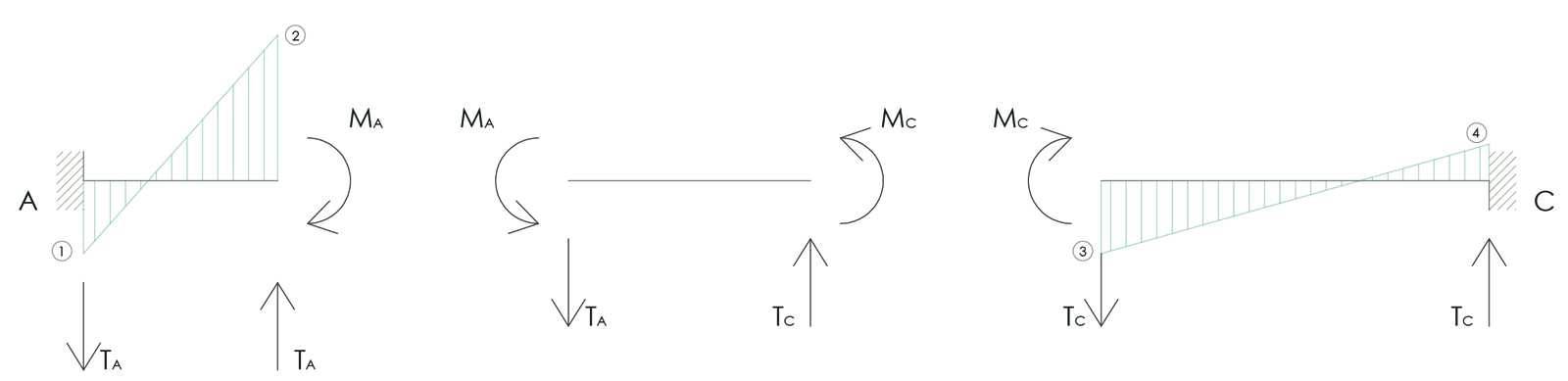
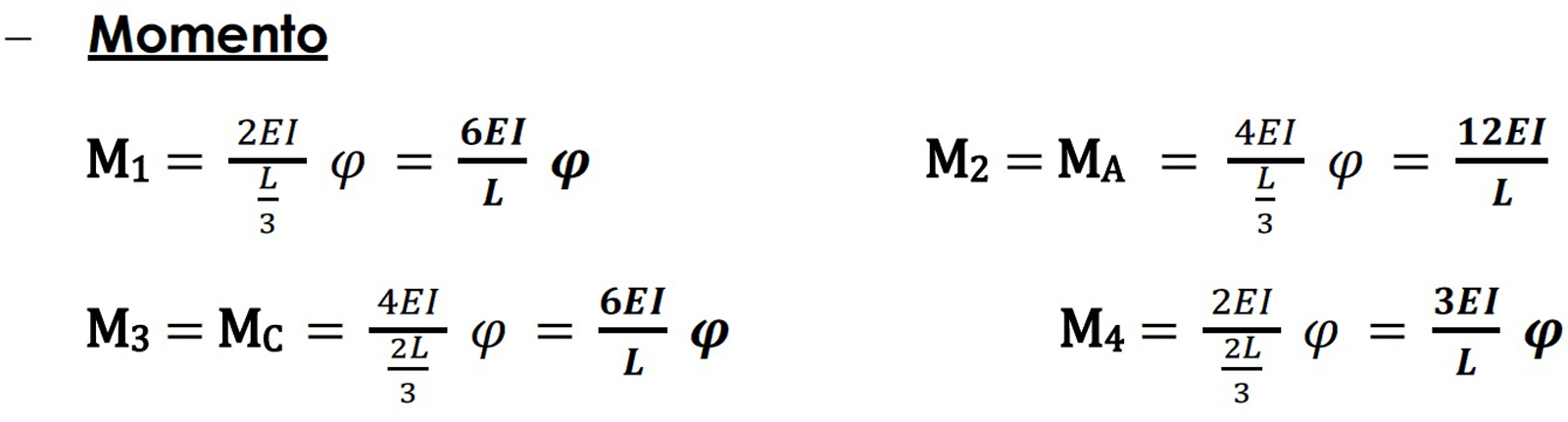
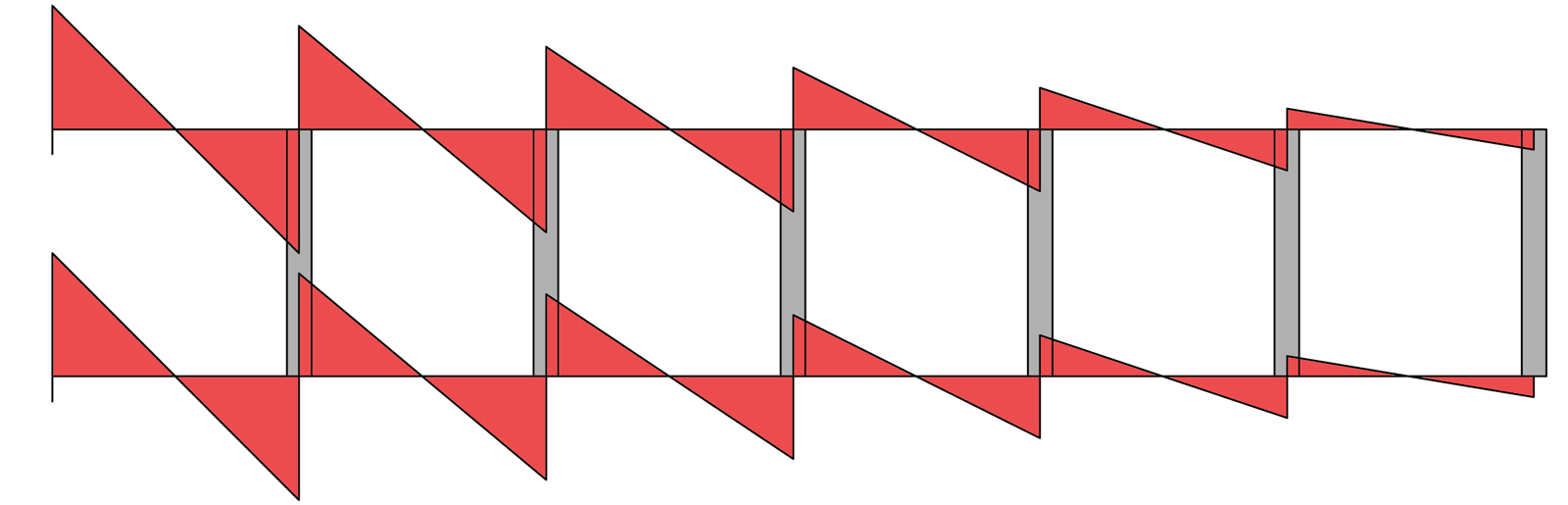
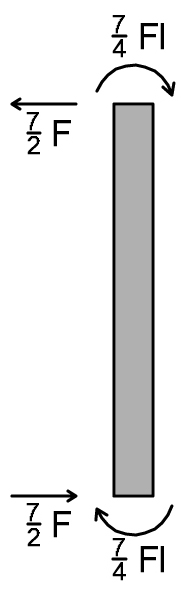
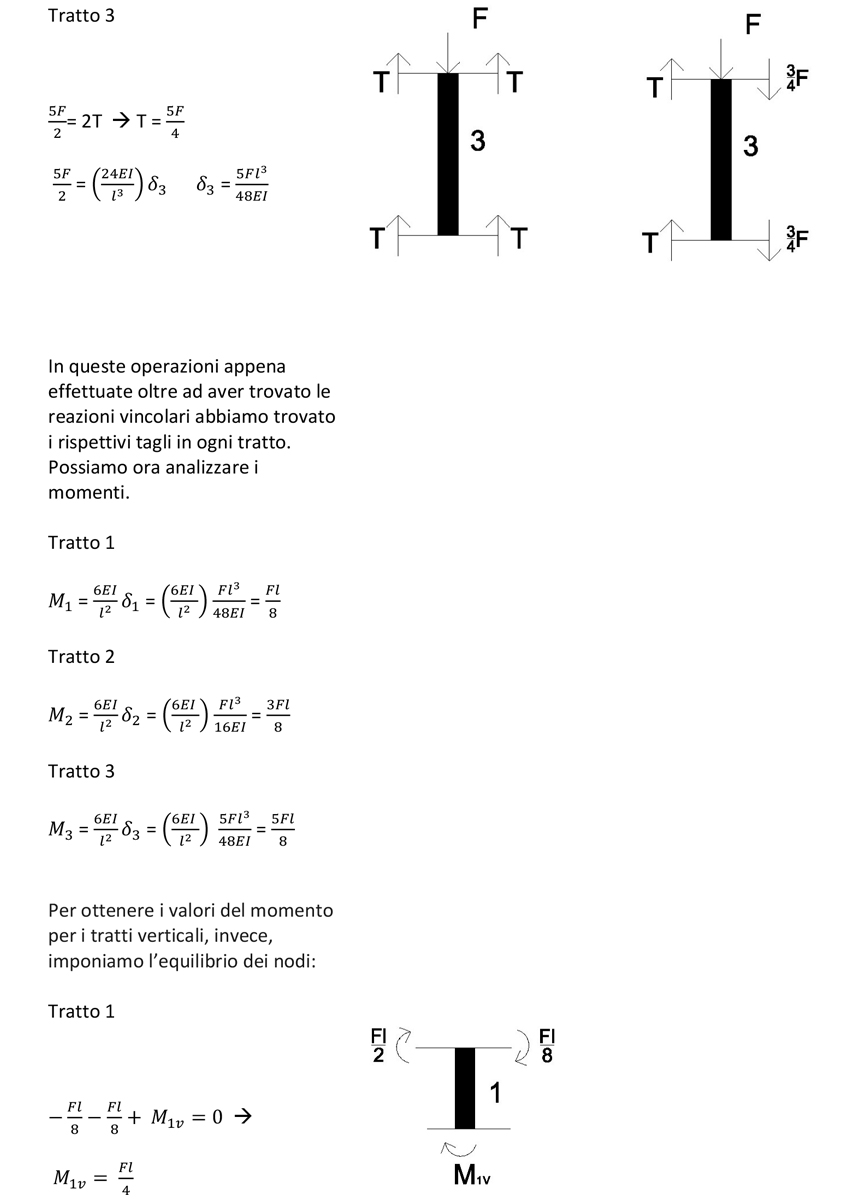
la rotazione imposta al nodo prova un’inflessione nella trave AC e il punto stesso ruota intorno all’asse y. Anche in questo caso, come in precedenza, ci affidiamo a schemi notevoli dal momento che abbiamo già affrontato la questione della rigidezza flessionale e conosciamo i valori dei momenti agli estremi in una trave doppiamente incastrata:

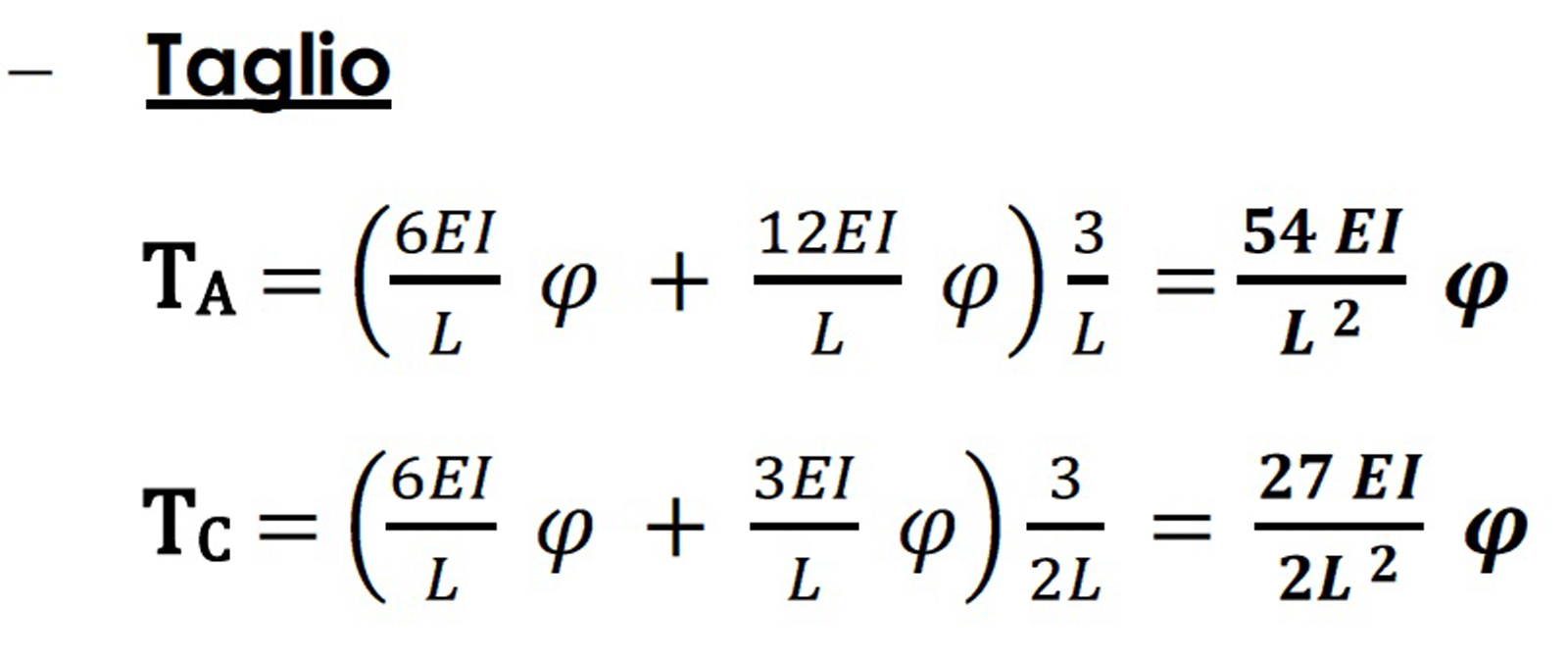
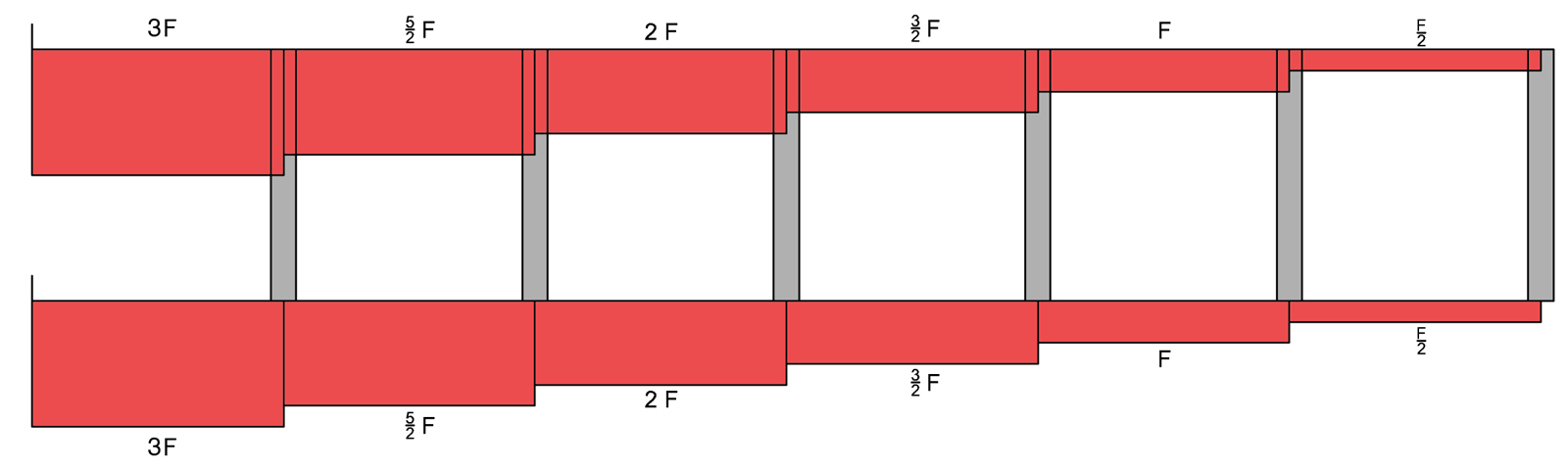
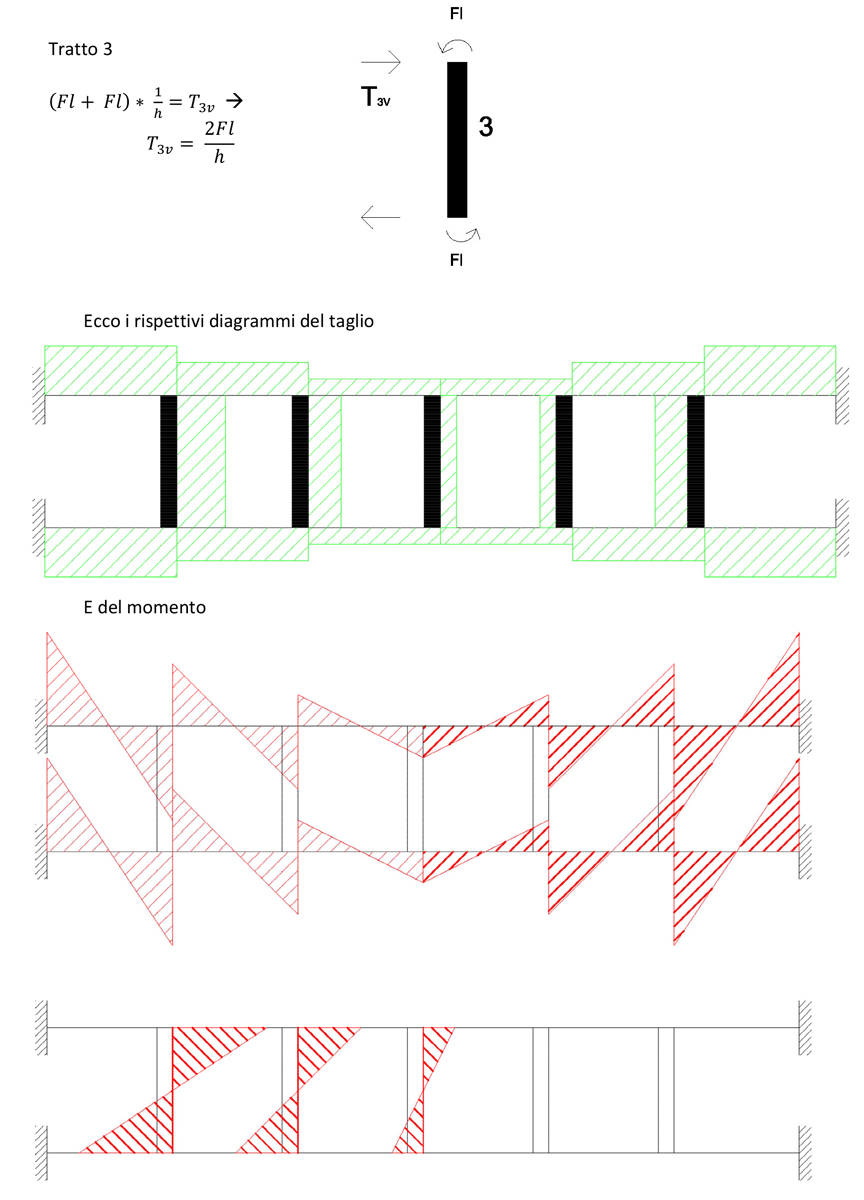
noto il diagramma dei Momenti, possiamo calcolare anche gli sforzi di Taglio:
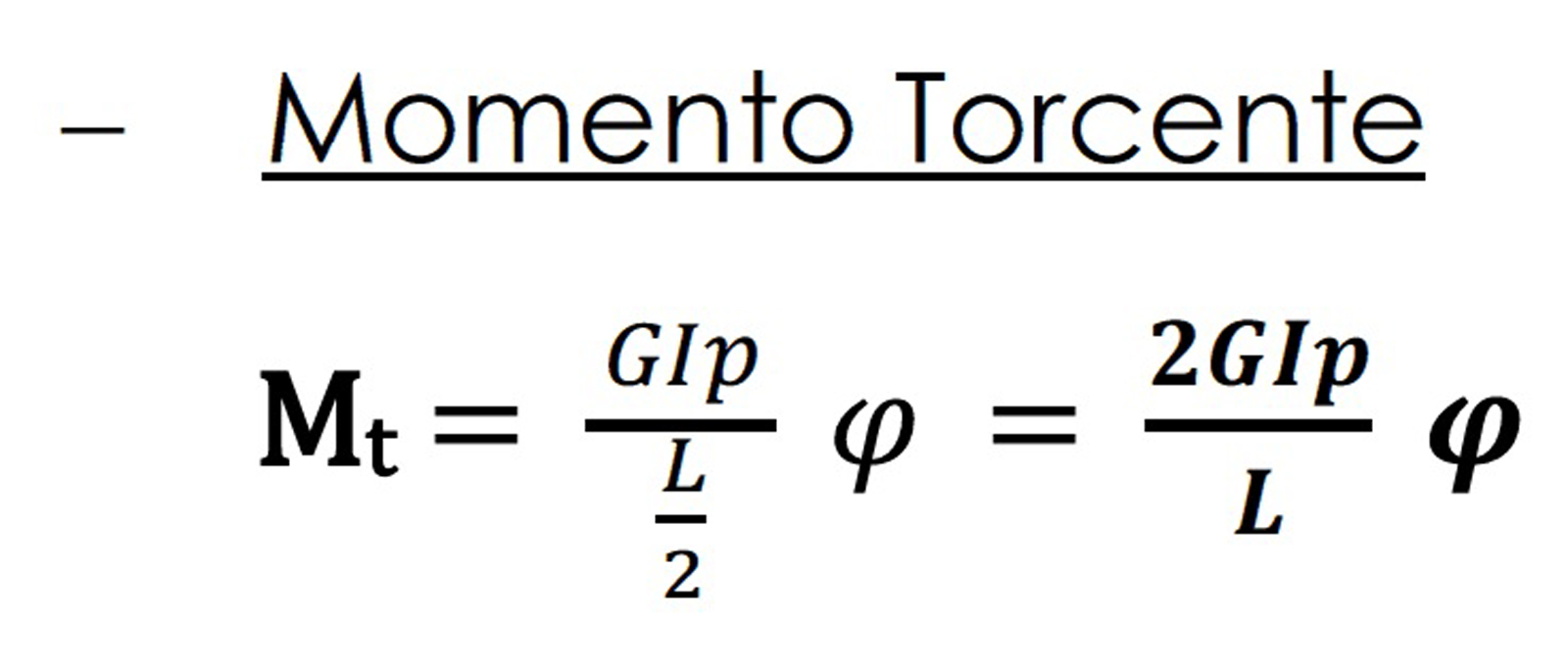
La flessione della trave AC intorno all’asse y corrisponde inevitabilmente alla torsione di quella BD:
-
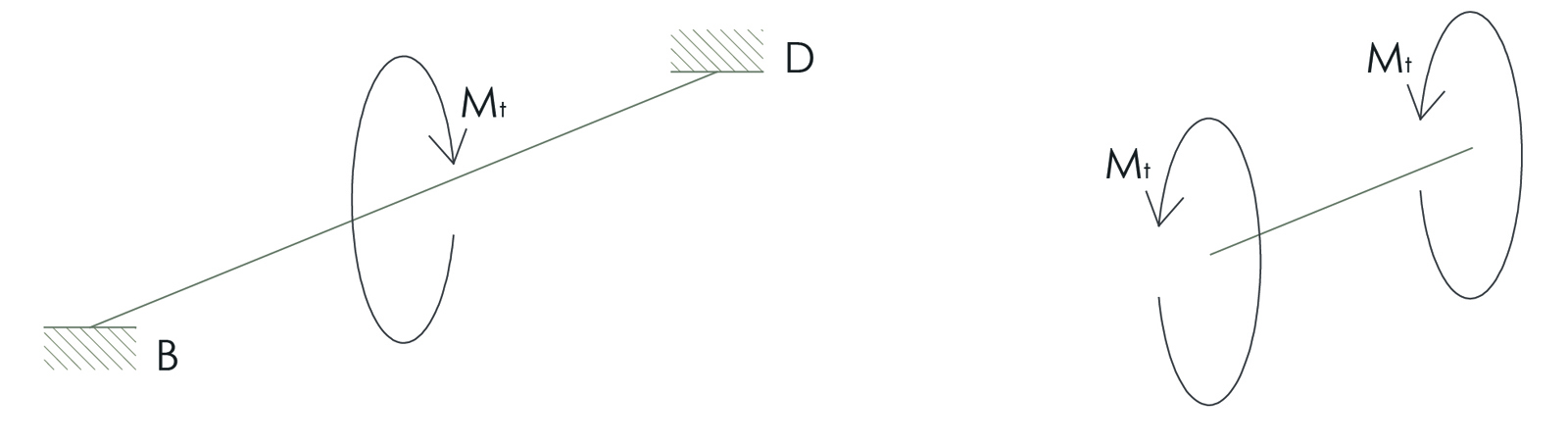
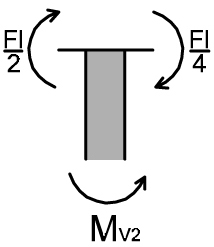
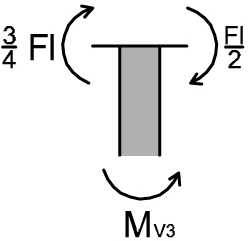
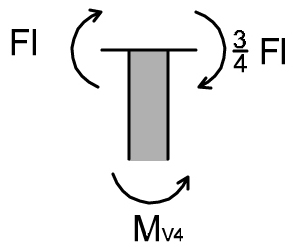
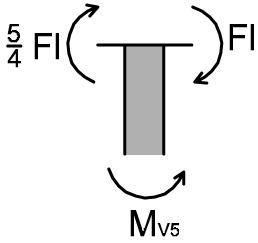
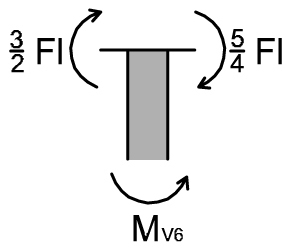
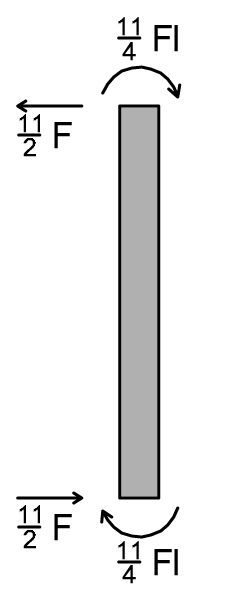
deformazione dovuta solo alla rotazione per la trave BD (TORSIONE):
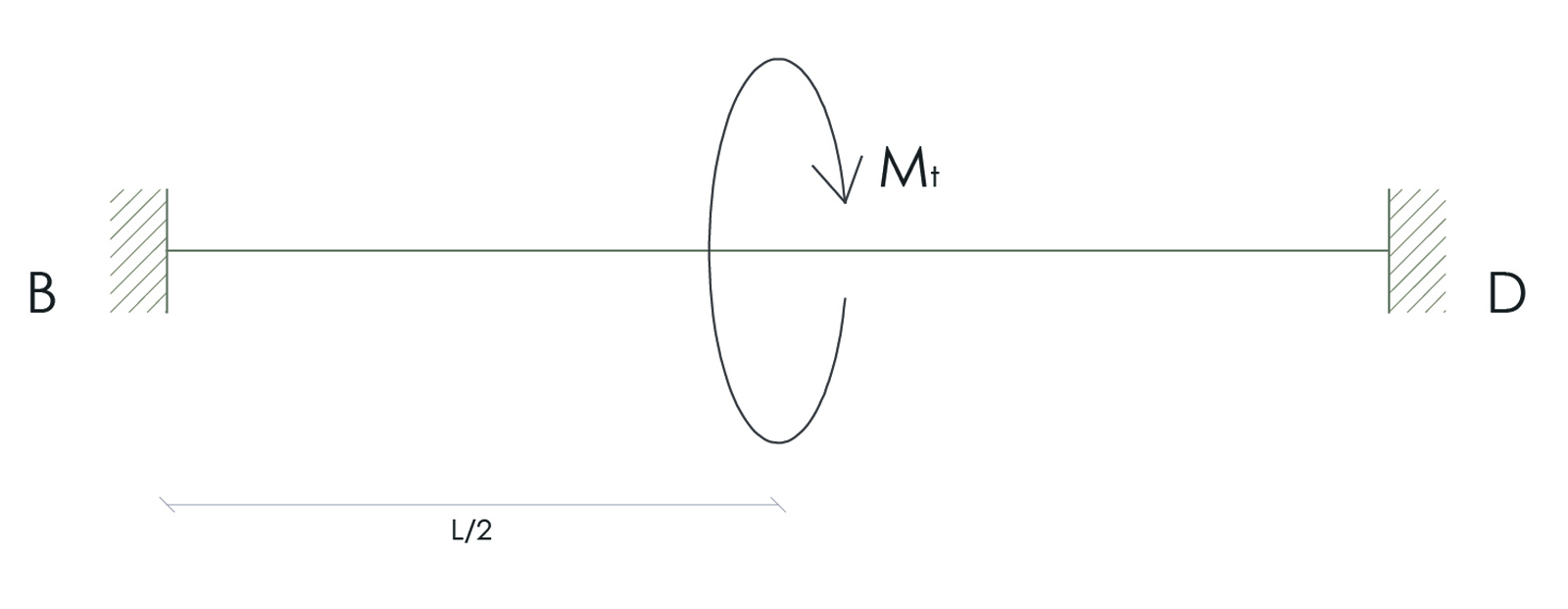
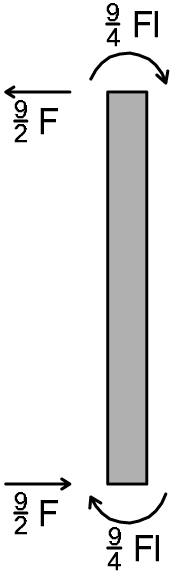
il Momento Torcente agente sulla trave genera due momenti reagenti di verso opposto, cosa non trascurabile per determinare poi il segno di questi due contributi nell’equazione di equilibrio dei momenti:
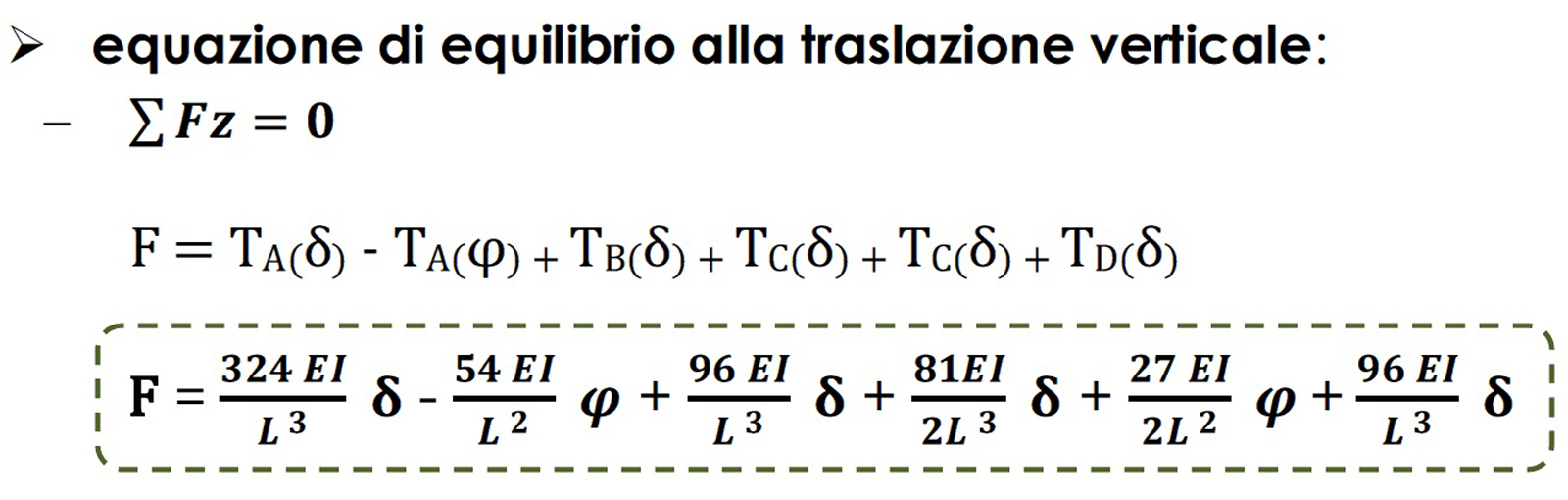
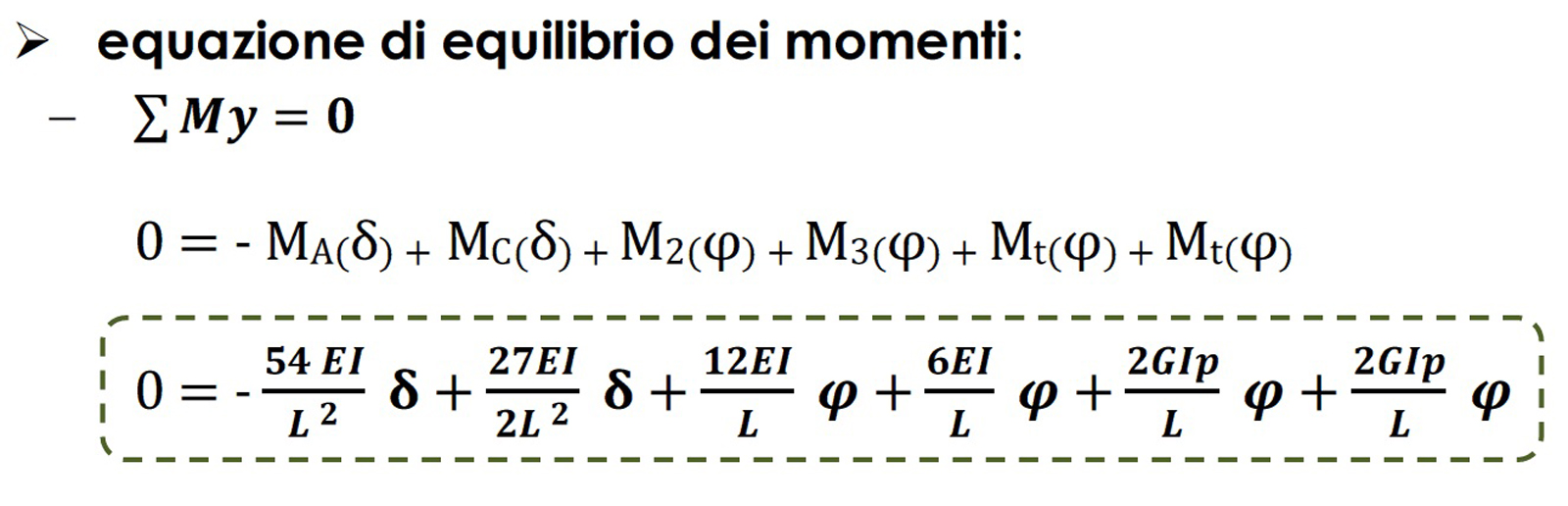
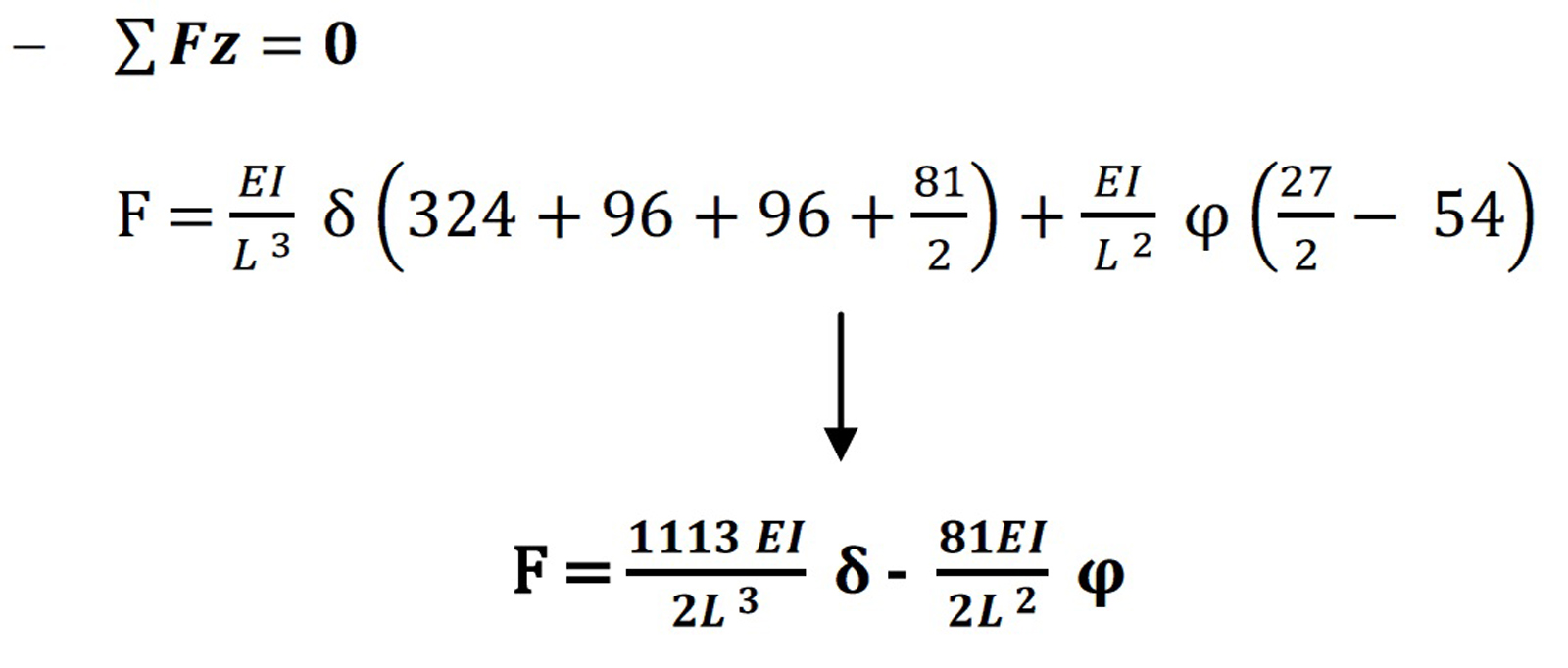
A questo punto conosciamo tutti i contributi degli sforzi di Taglio e Momento Flettente agenti sul nodo e generati sia dalla traslazione che dalla rotazione. Possiamo, quindi, scrivere le due equazioni di equilibrio:
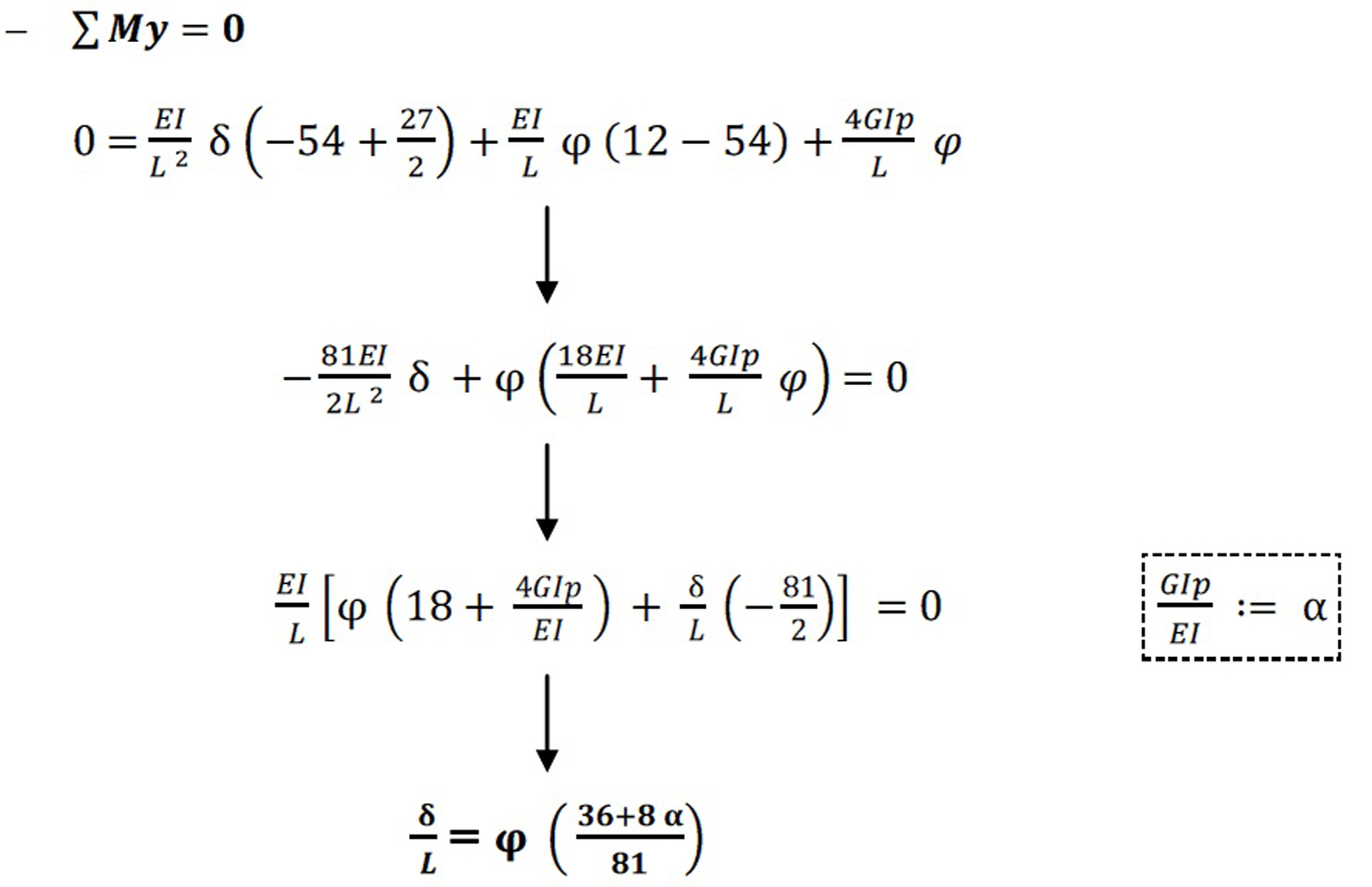
Risoluzione delle equazione distinte:
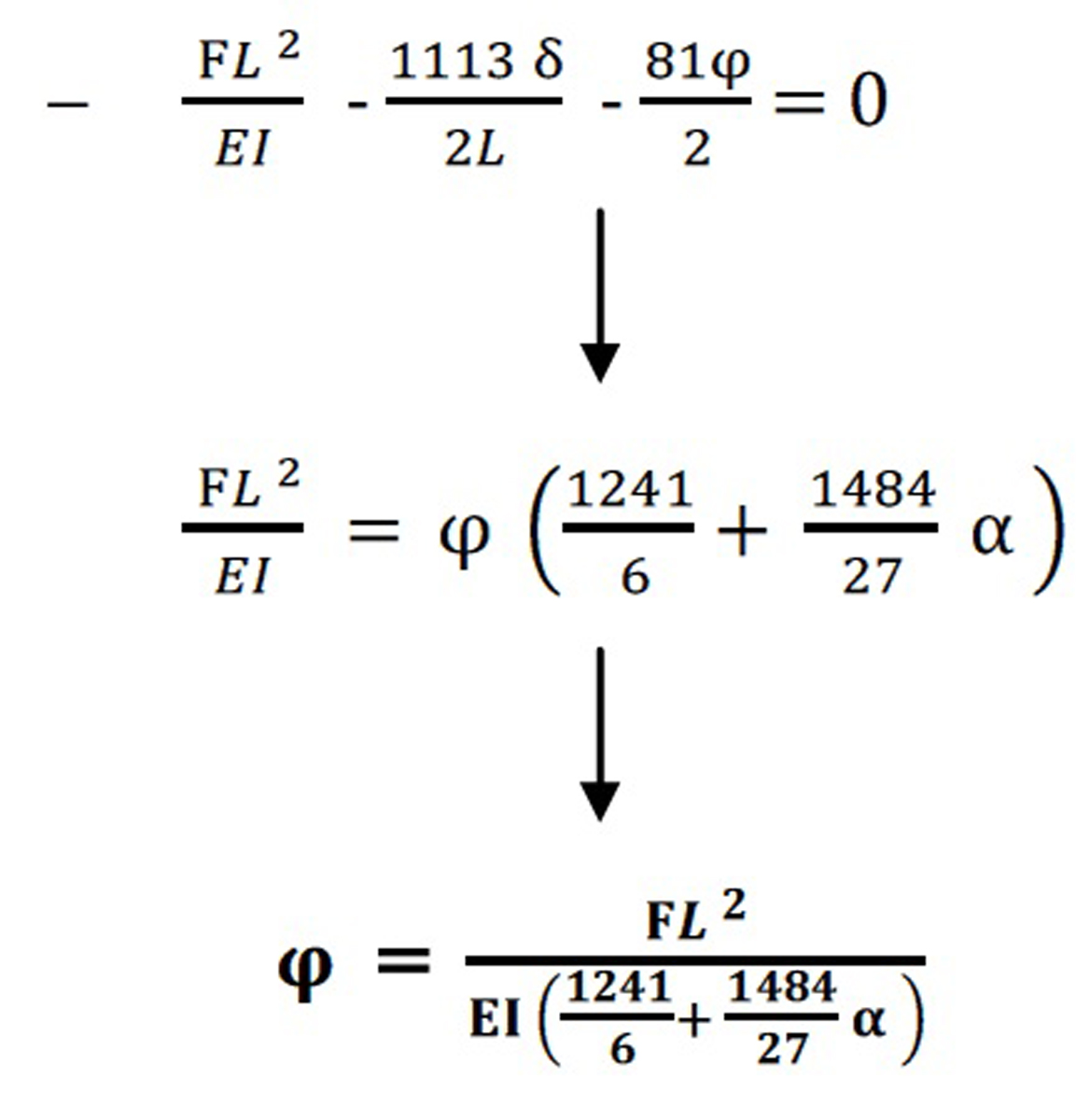
Sostituzione di δ/L all’interno della prima equazione e ricerca dell’incognita rotazione:
VERIFICA DEL GRATICCIO SU SAP
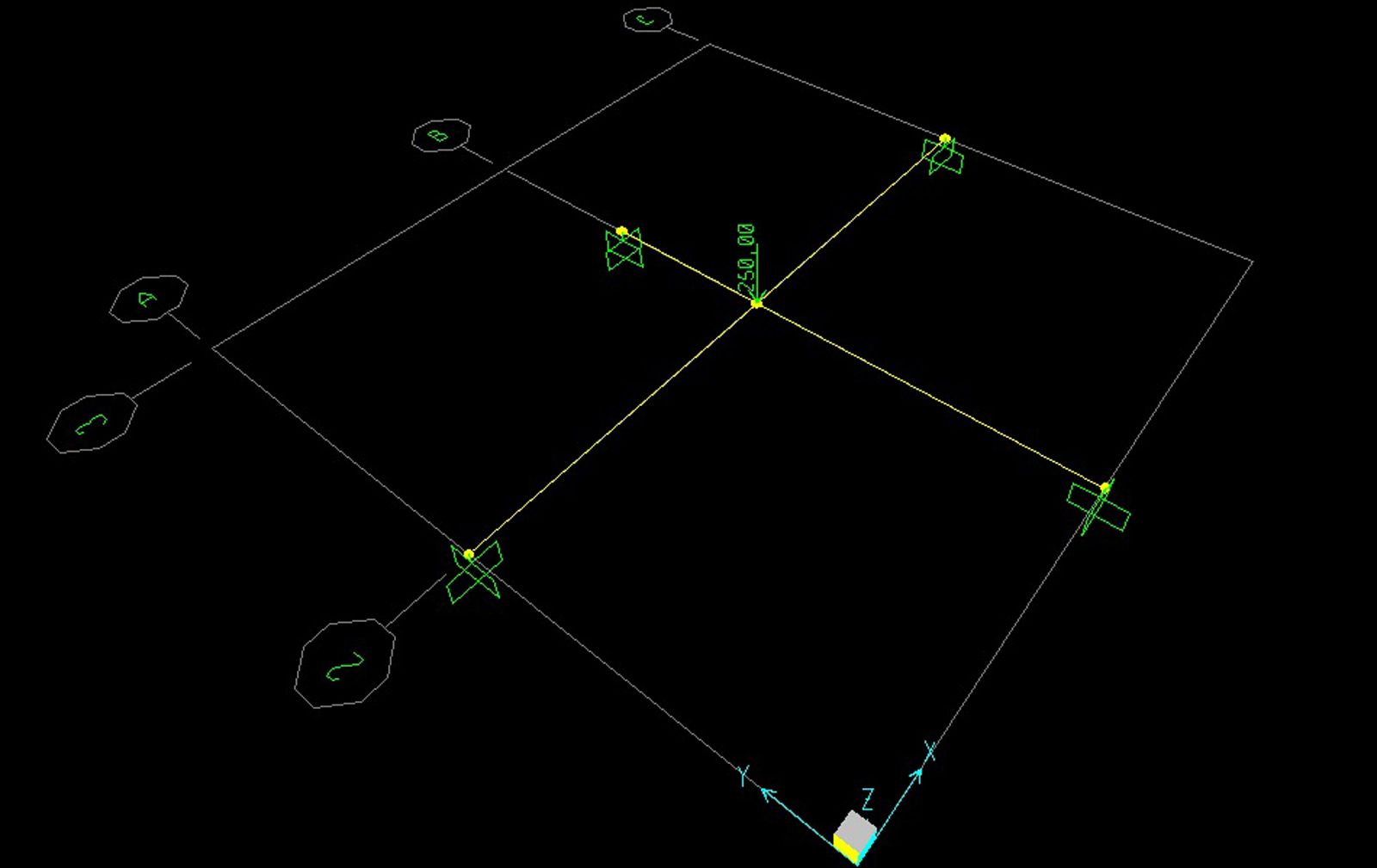
Scopo di questo esercizio è quantificare le variazioni degli abbassamenti e delle rotazioni relativi al nodo, punto d’incontro delle 2 travi doppiamente incastrate, al variare delle proporzioni di lunghezza e delle sezioni assegnate agli elementi strutturali. Infatti, come già sottolineato in precedenza, la rigidezza torsionale è direttamente proporzionale al Momento d’inerzia Polare, il quale dipende dal tipo di sezione.
-
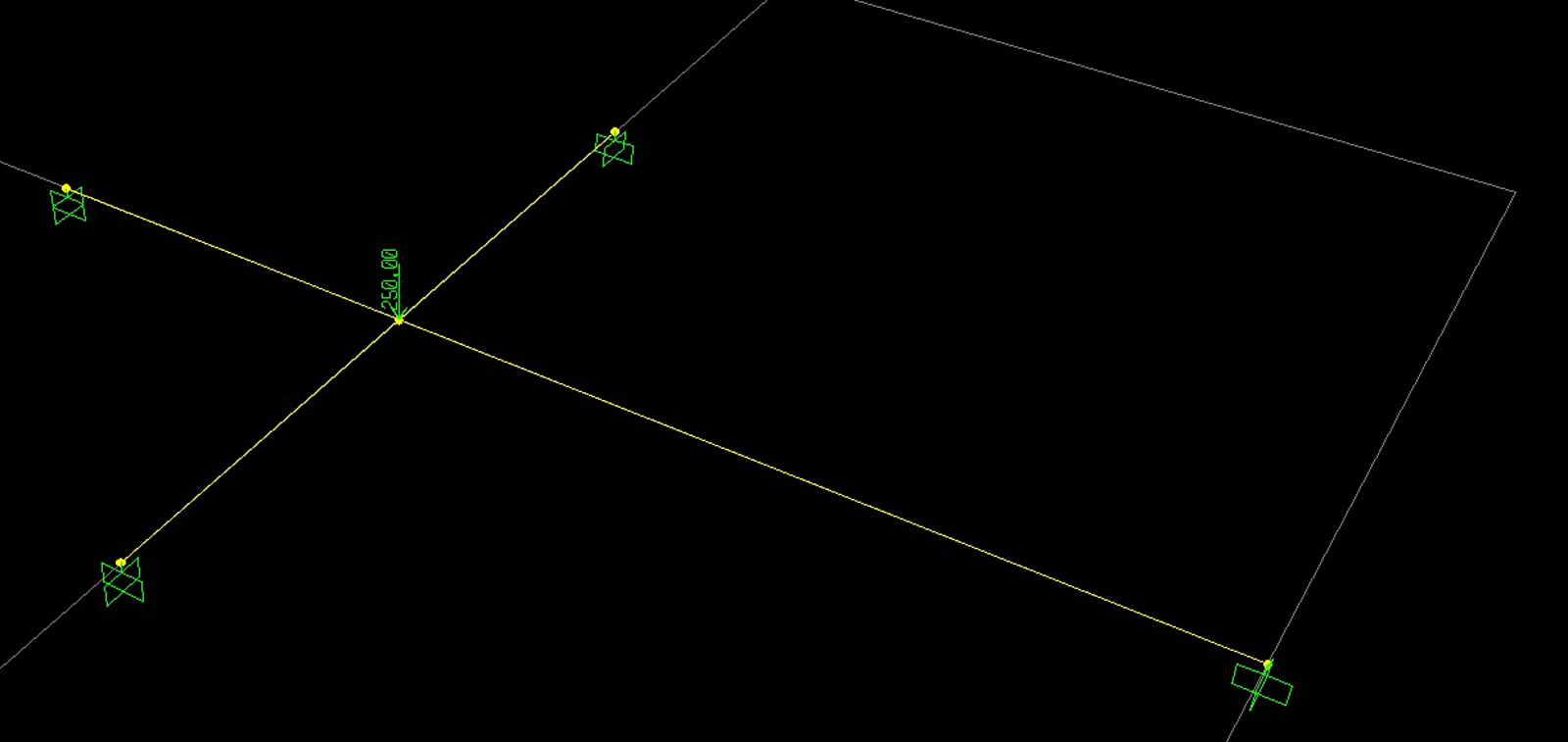
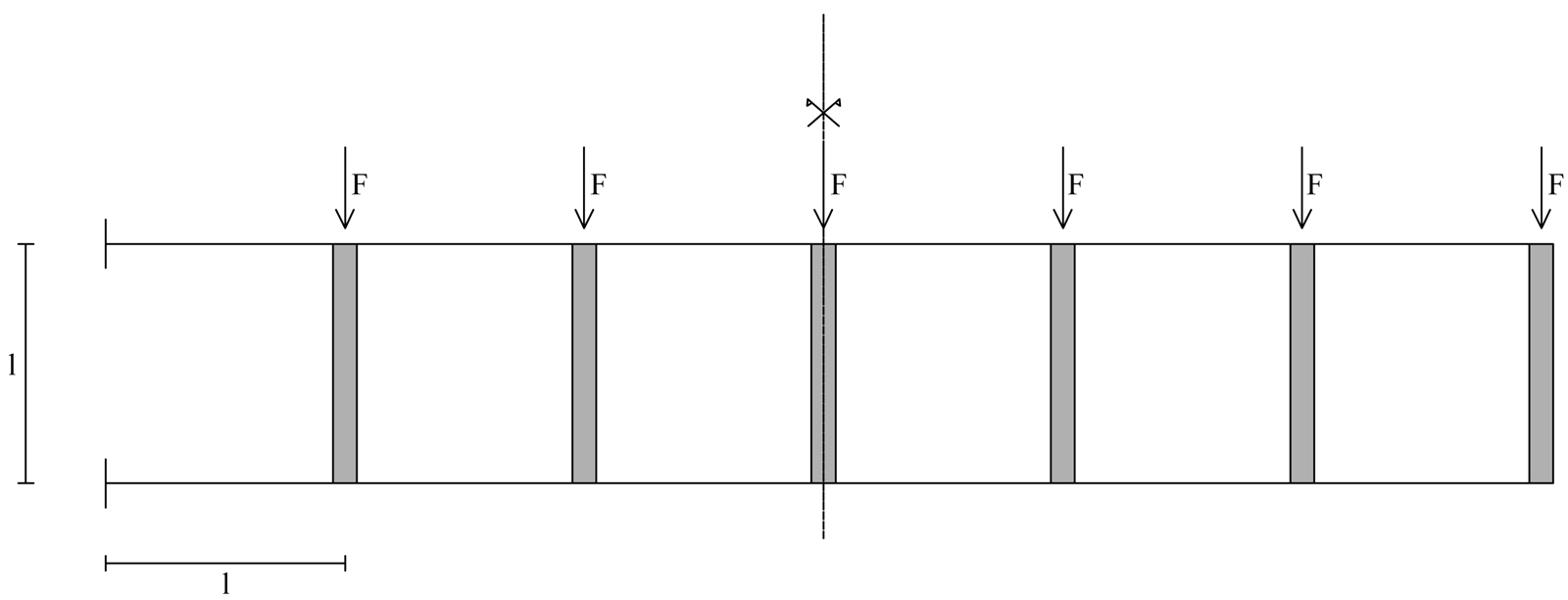
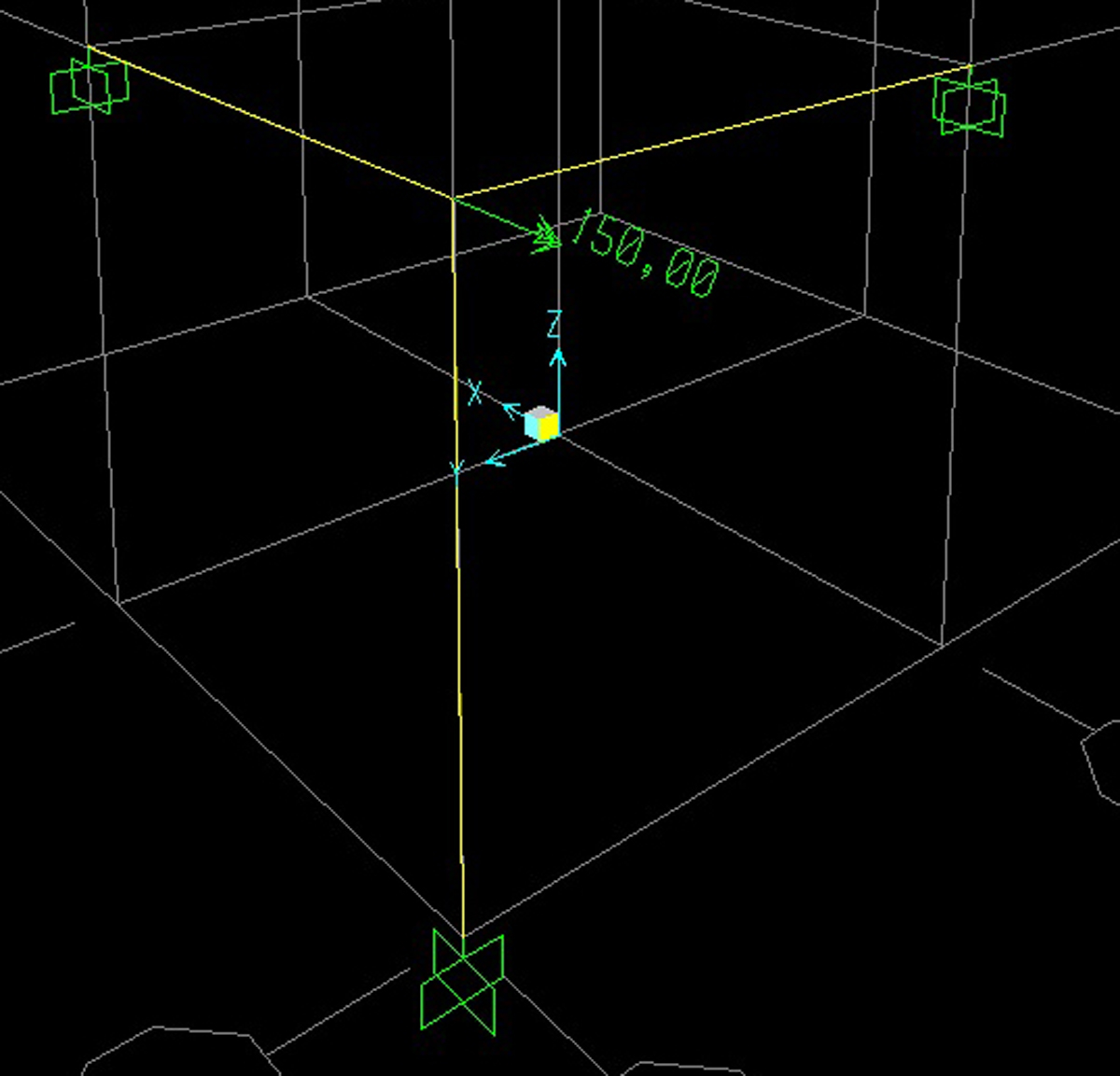
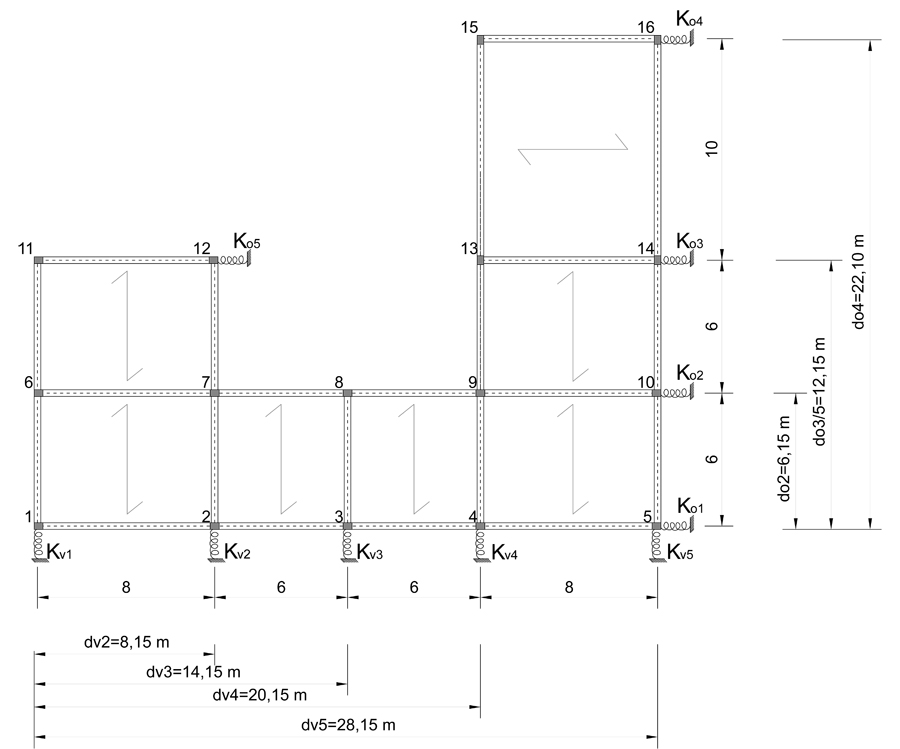
Immagine dello schema di partenza
-
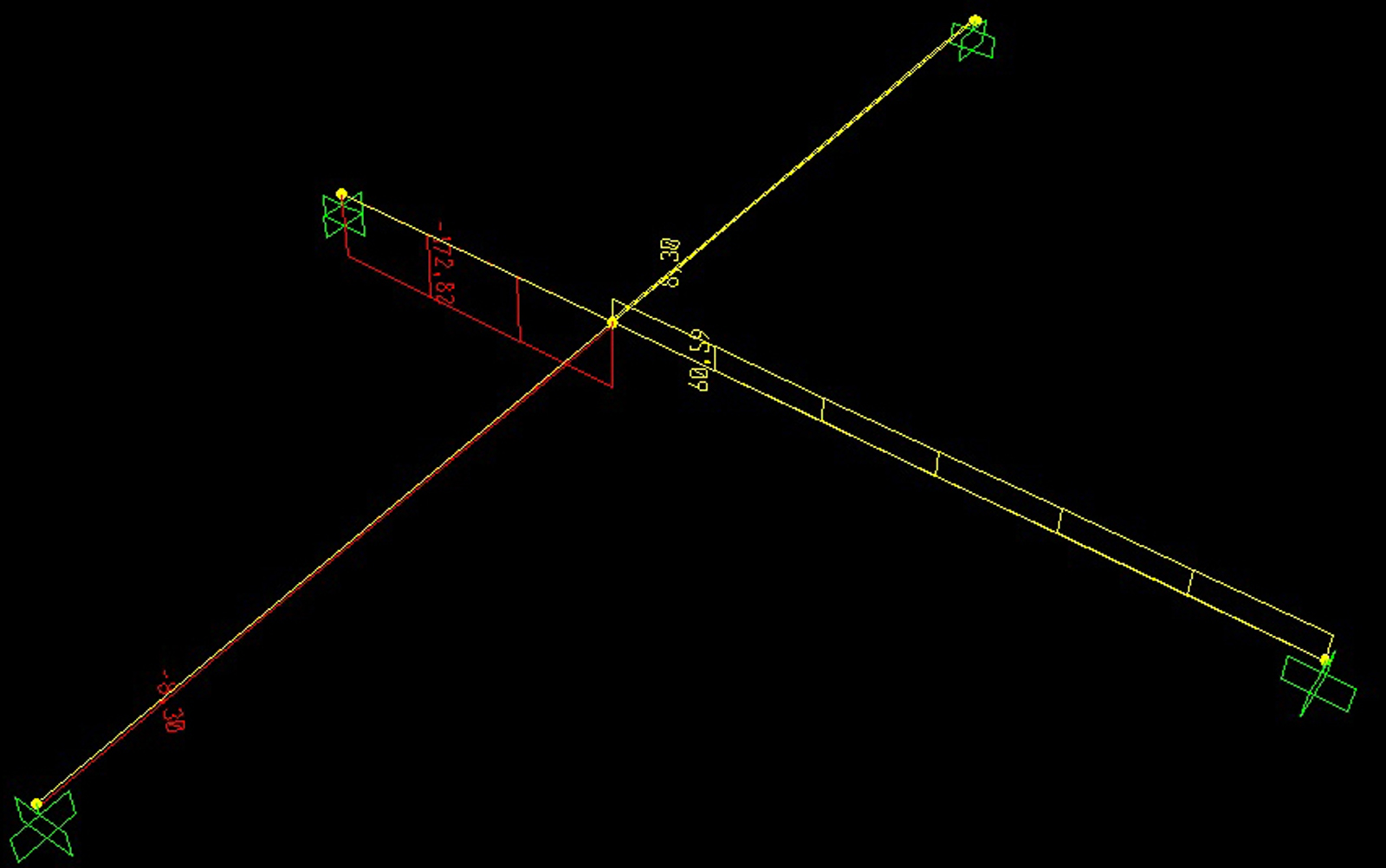
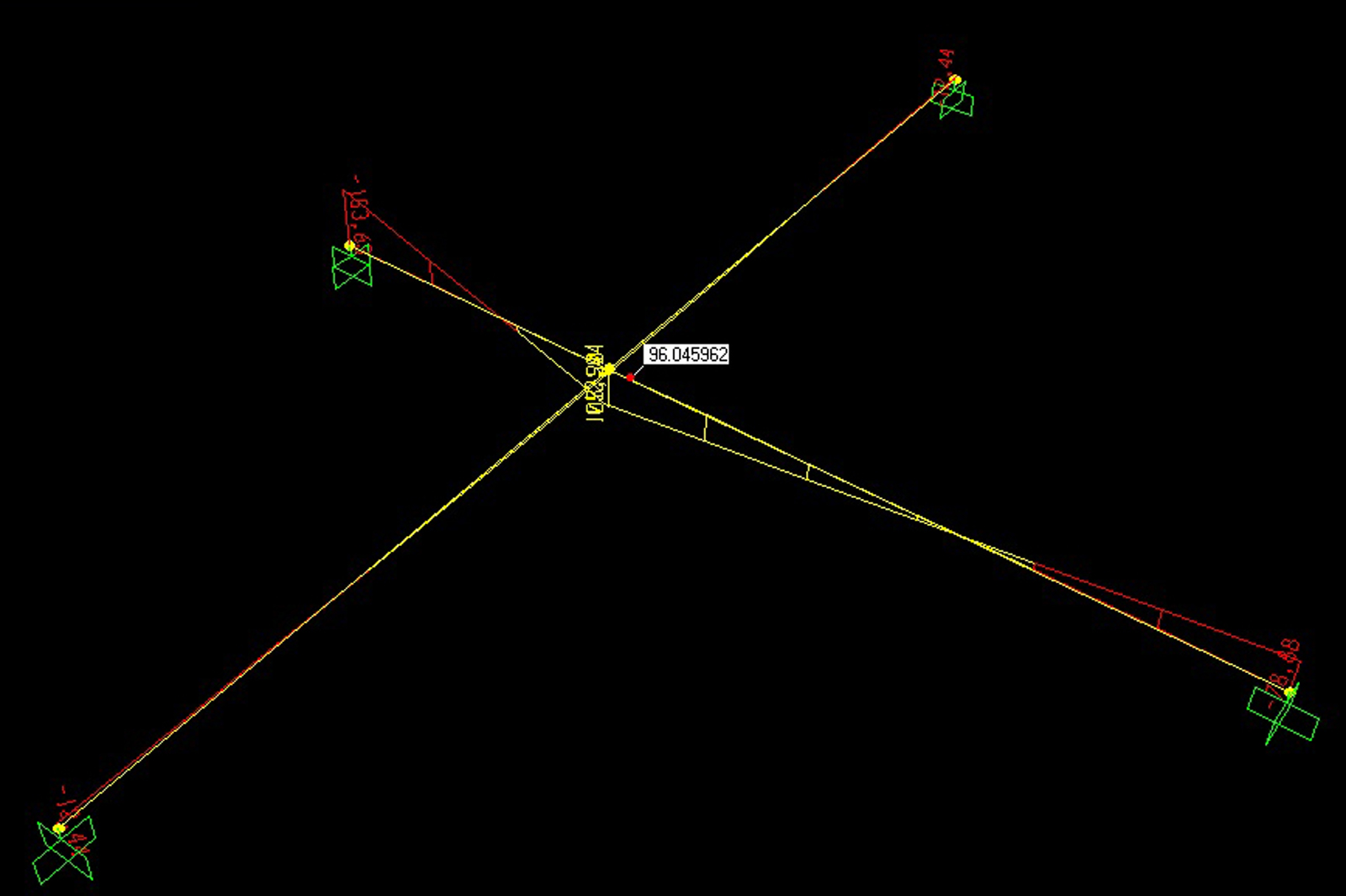
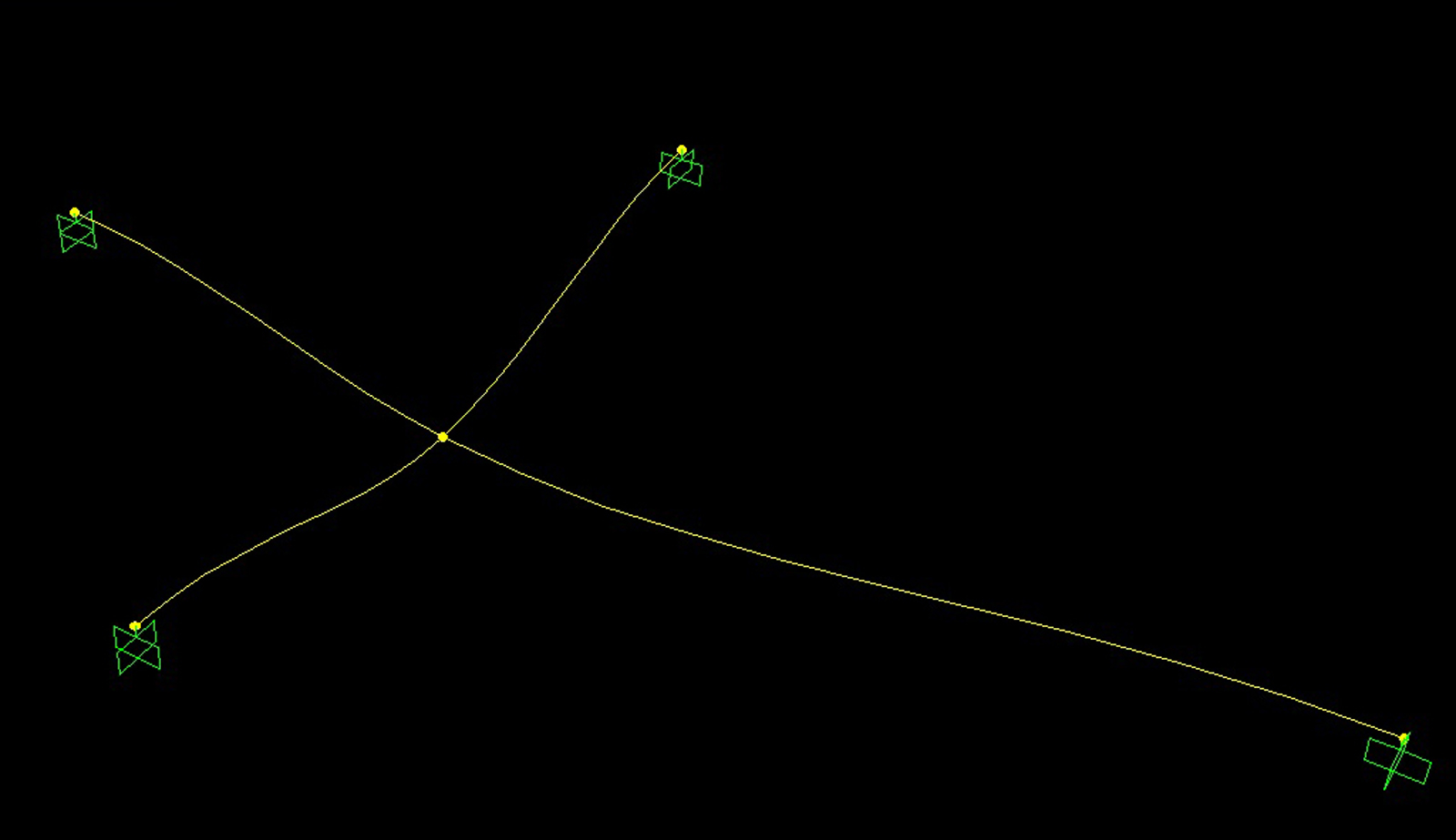
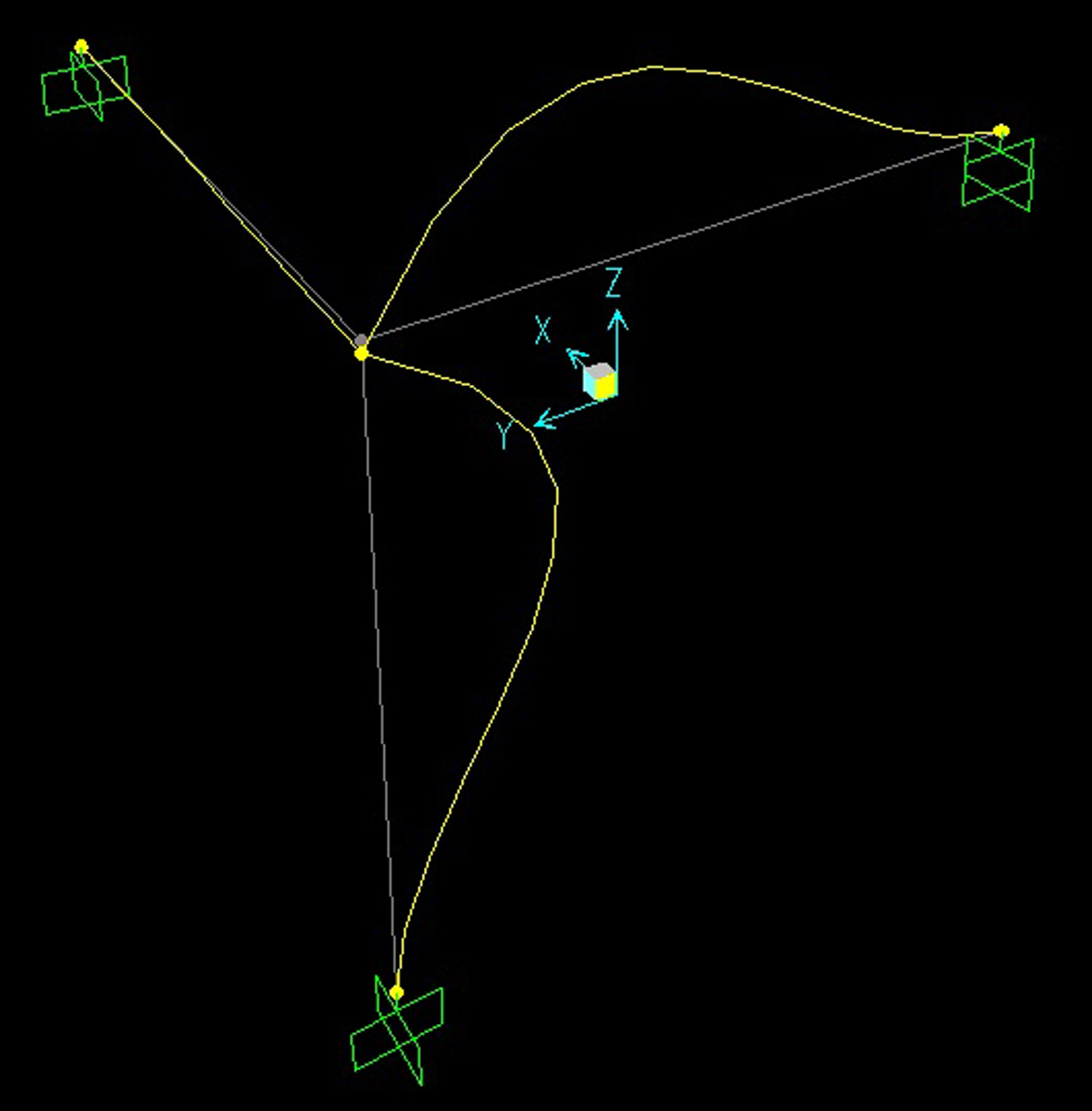
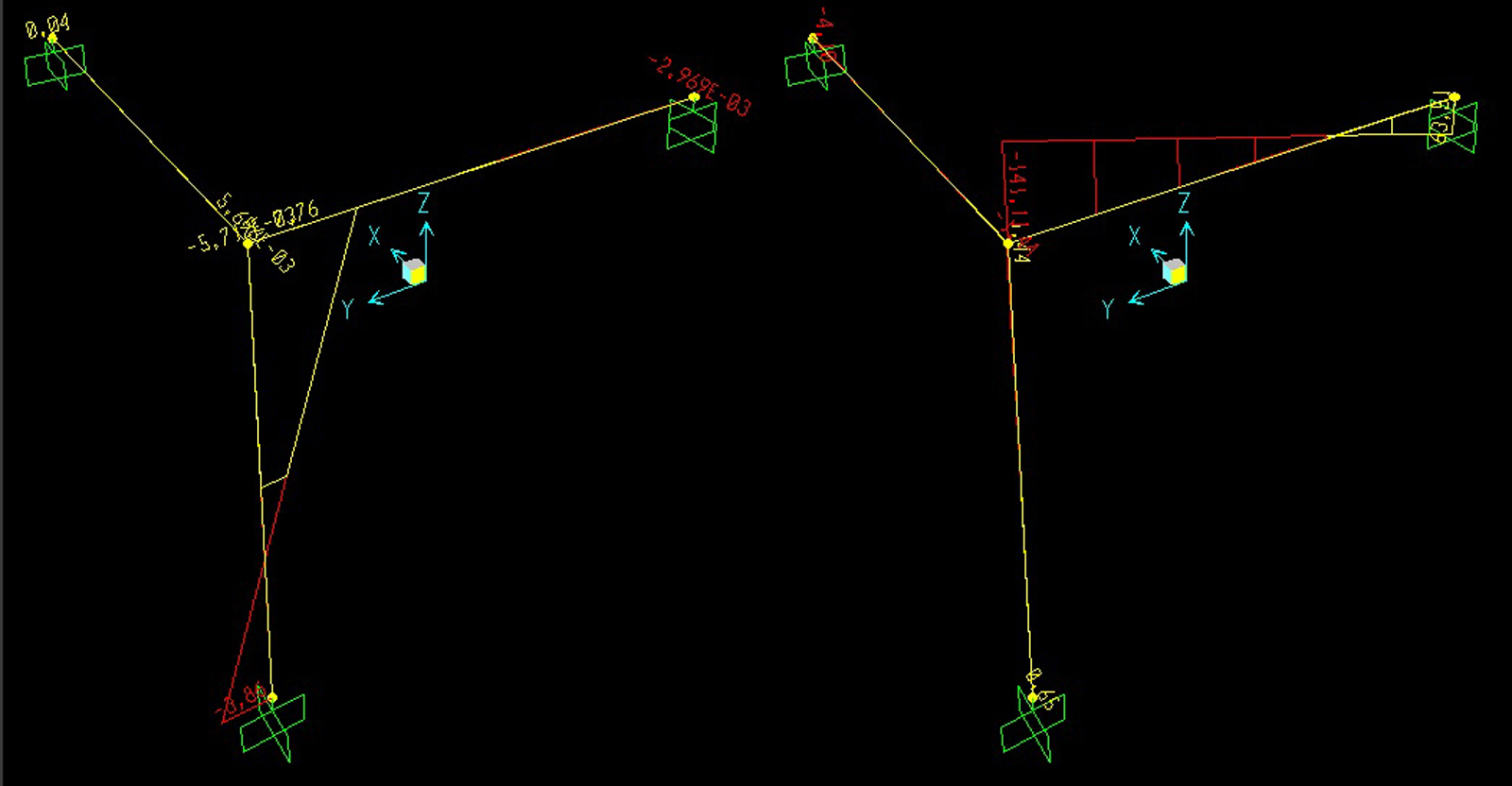
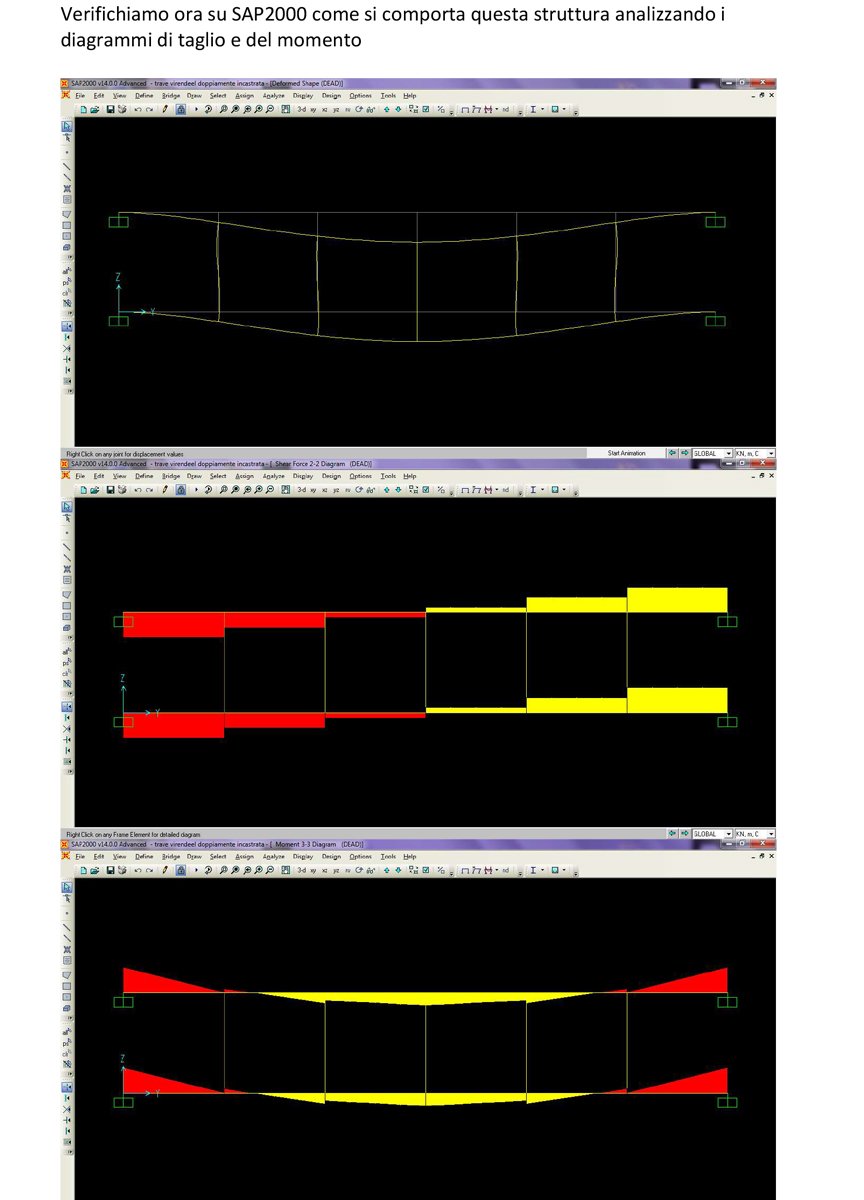
la forza F agente sul nodo provoca le deformate qualitativamente descritte precedentemente nella risoluzione a mano:

-
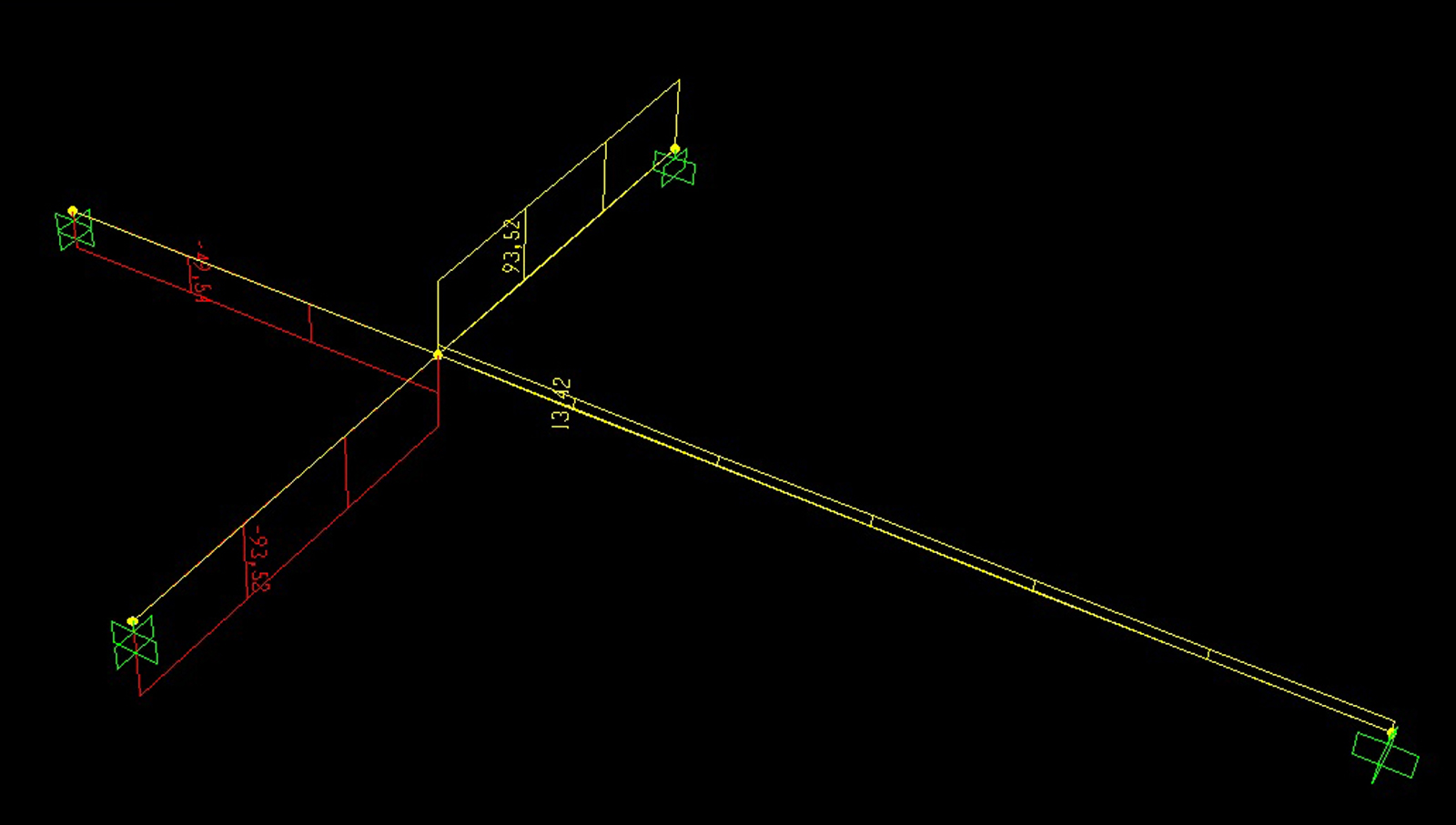
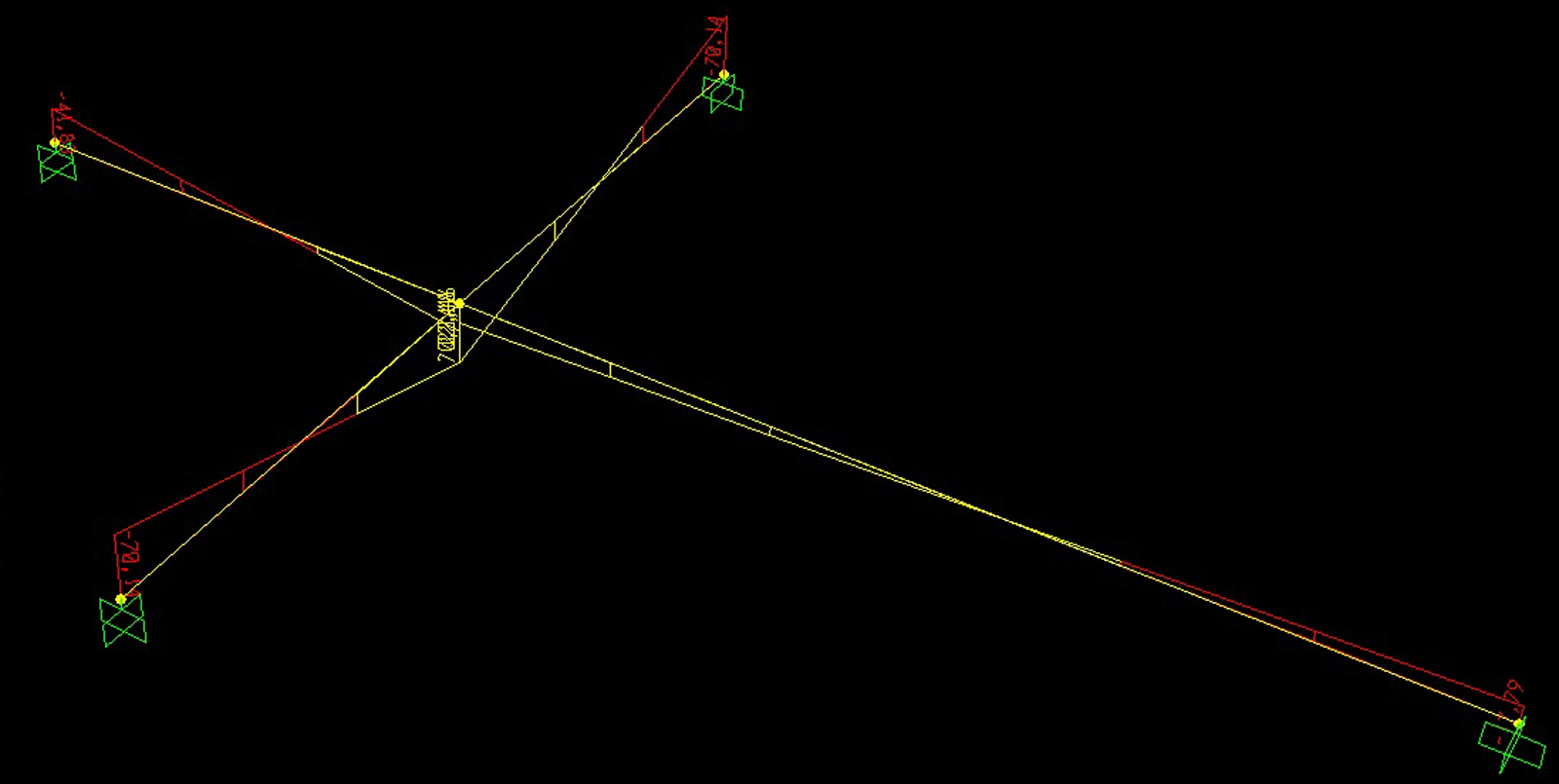
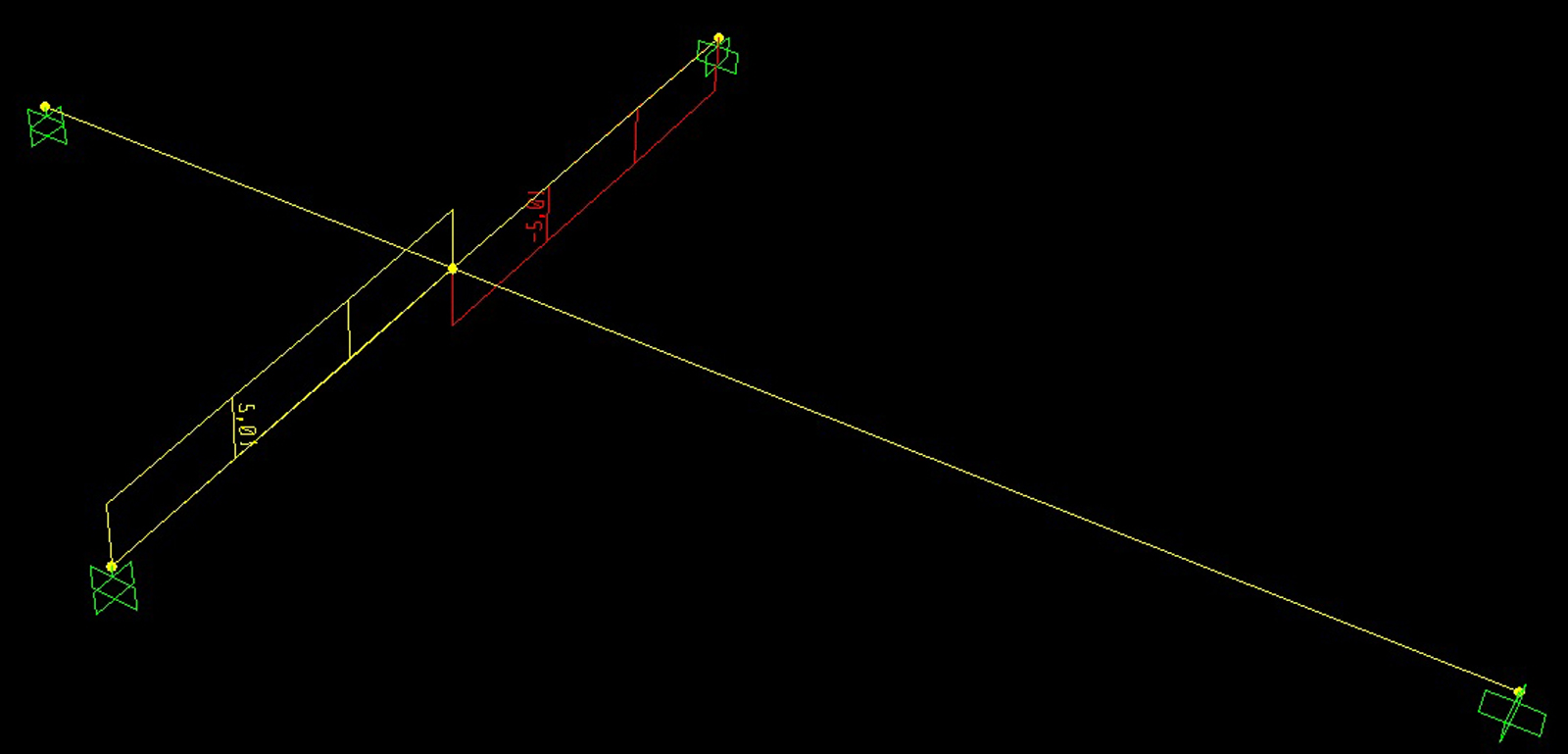
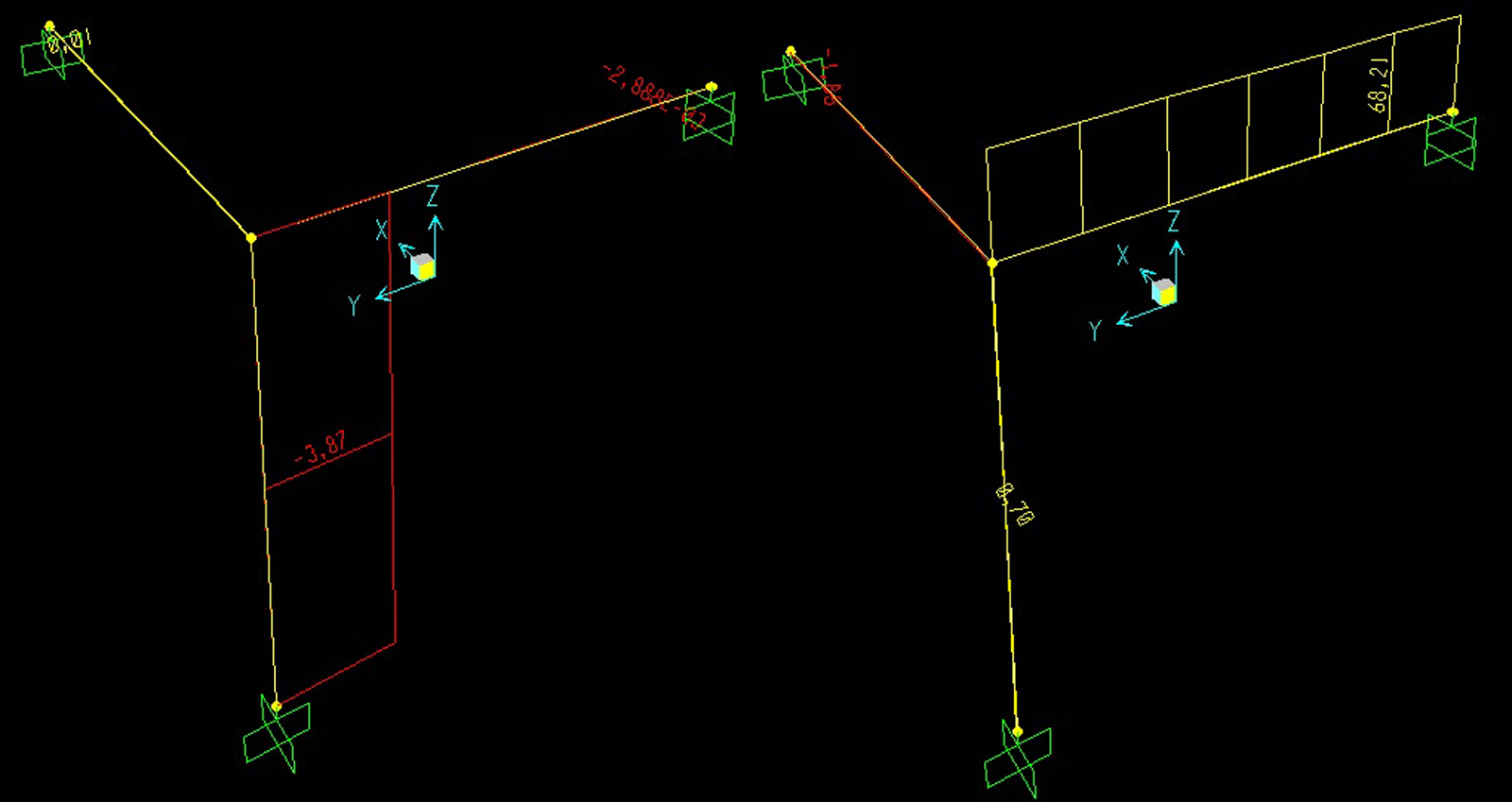
Questi sono i rispettivi diagrammi di Taglio, Momento flettente e Momento torcente:

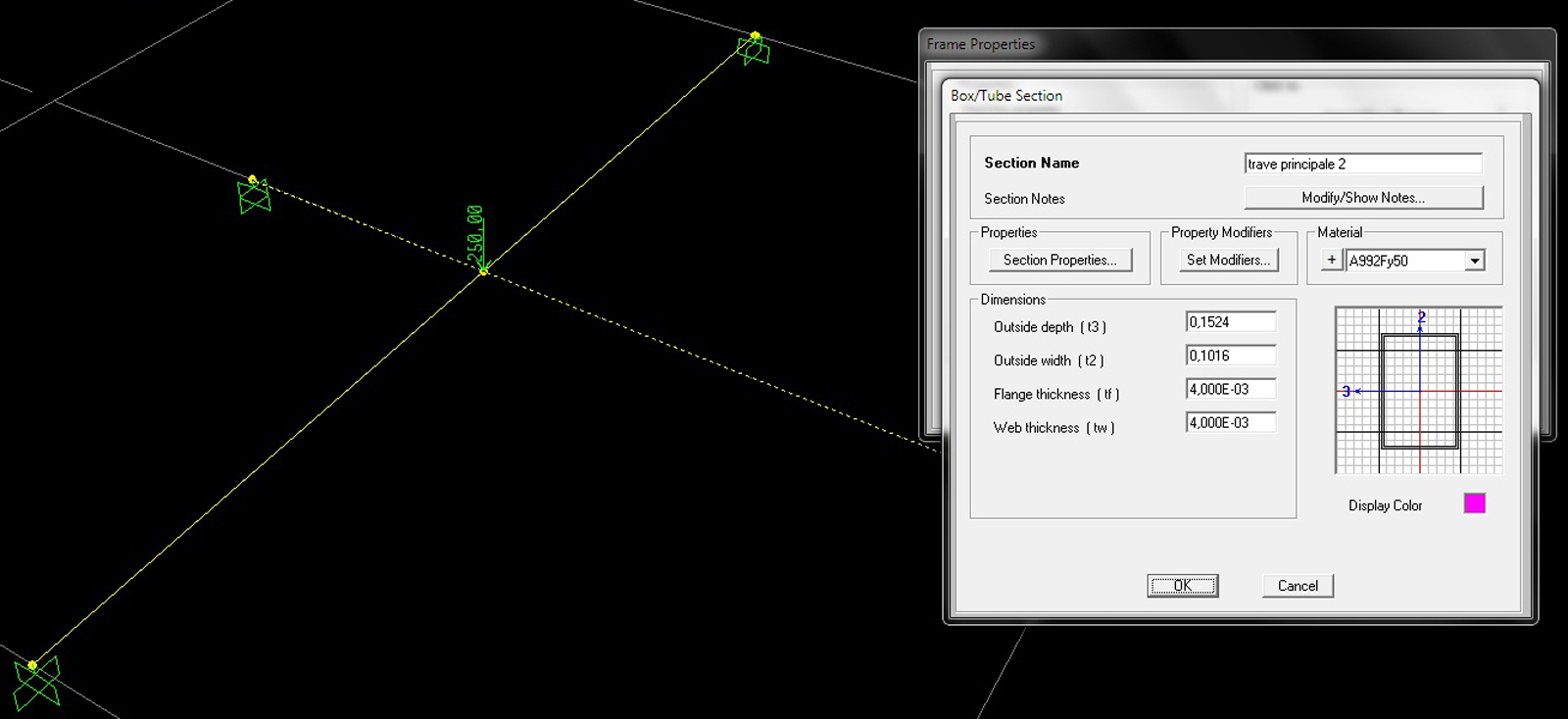
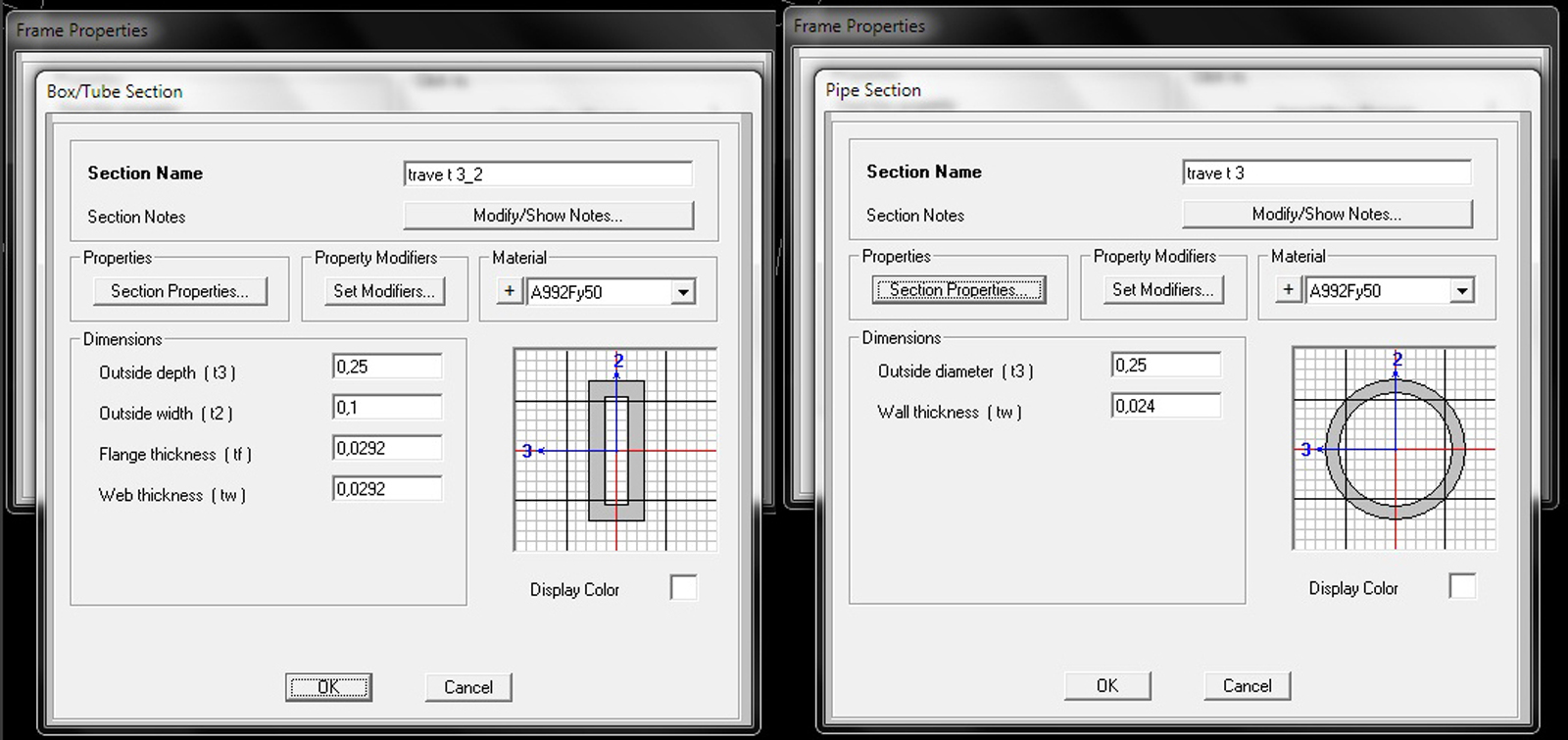
Ad una delle due travi, quella con la forza applicata ad un terzo della luce, è stata associata una sezione costante in acciaio di tipo scatolare, con spessori ridotti in modo da consentire abbassamenti sensibili che mettessero in evidenza il contributo dell’altra trave. Inoltre, così facendo essa mantiene costante la sua rigidezza flessionale, quindi le differenze nei valori delle rotazioni finali tra i diversi casi studio saranno dovute soltanto al contributo della rigidezza torsionale.
A quest’ultima state assegnate 3 sezioni differenti con due condizioni di luce distinte, in modo da avere una gamma di risultati relativamente ampia che consentisse un qualunque discorso comparativo.
-
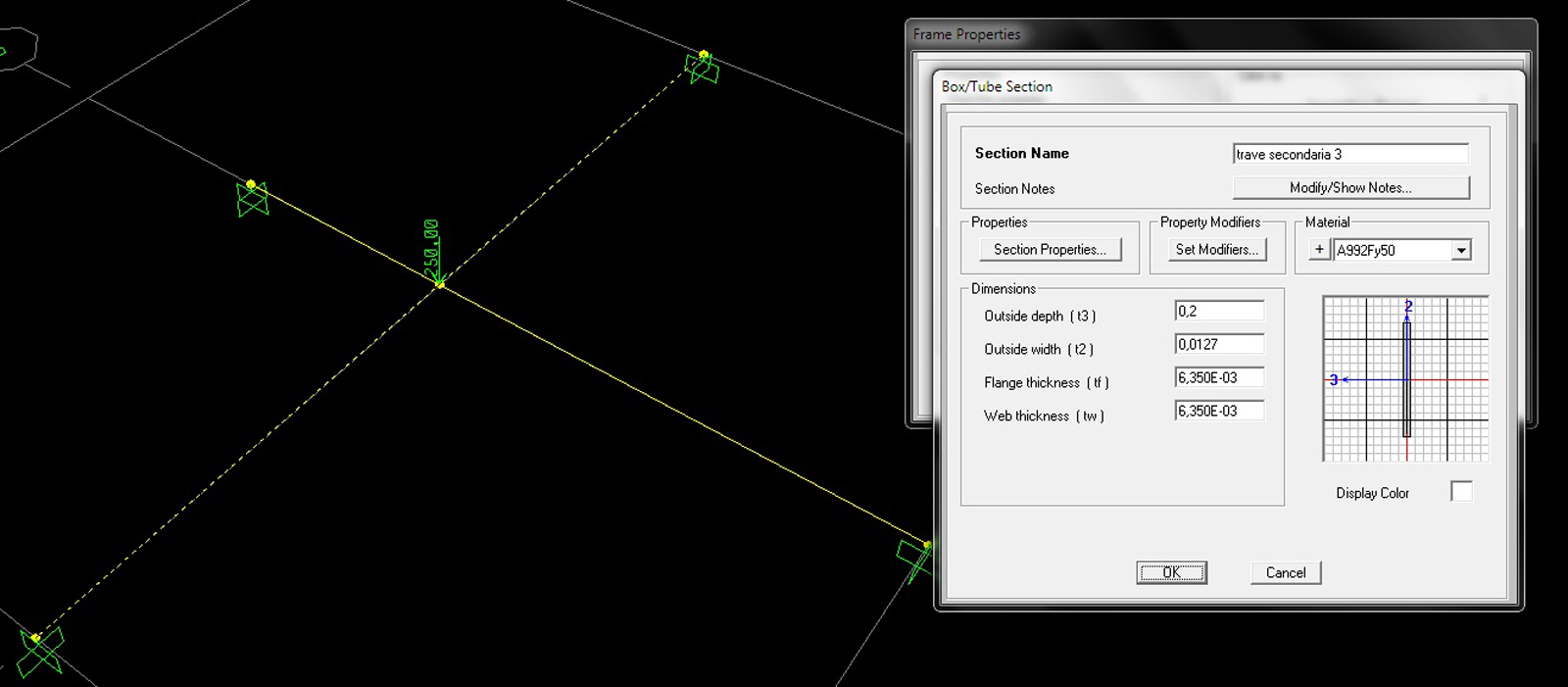
La prima è una sezione scatolare in acciaio:

-
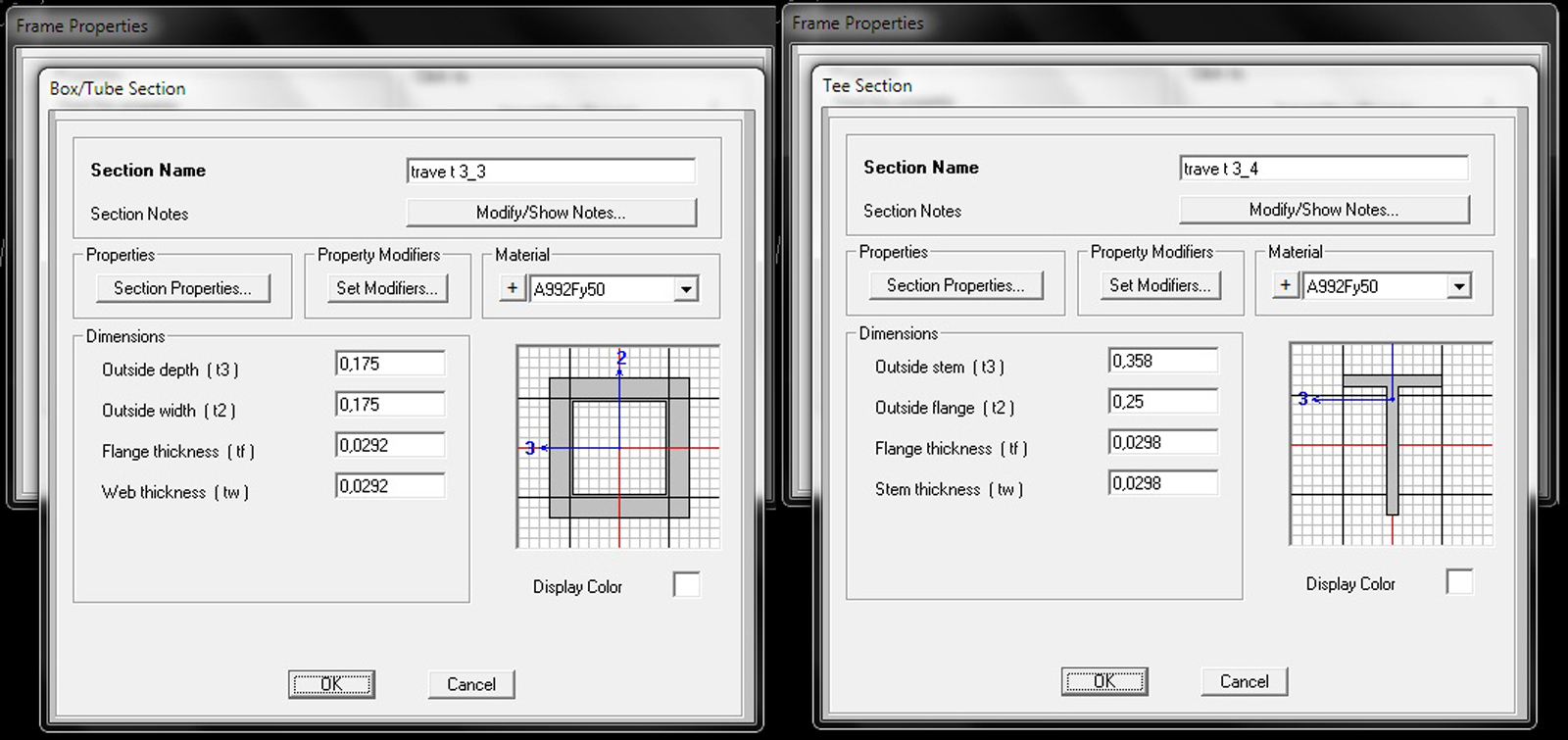
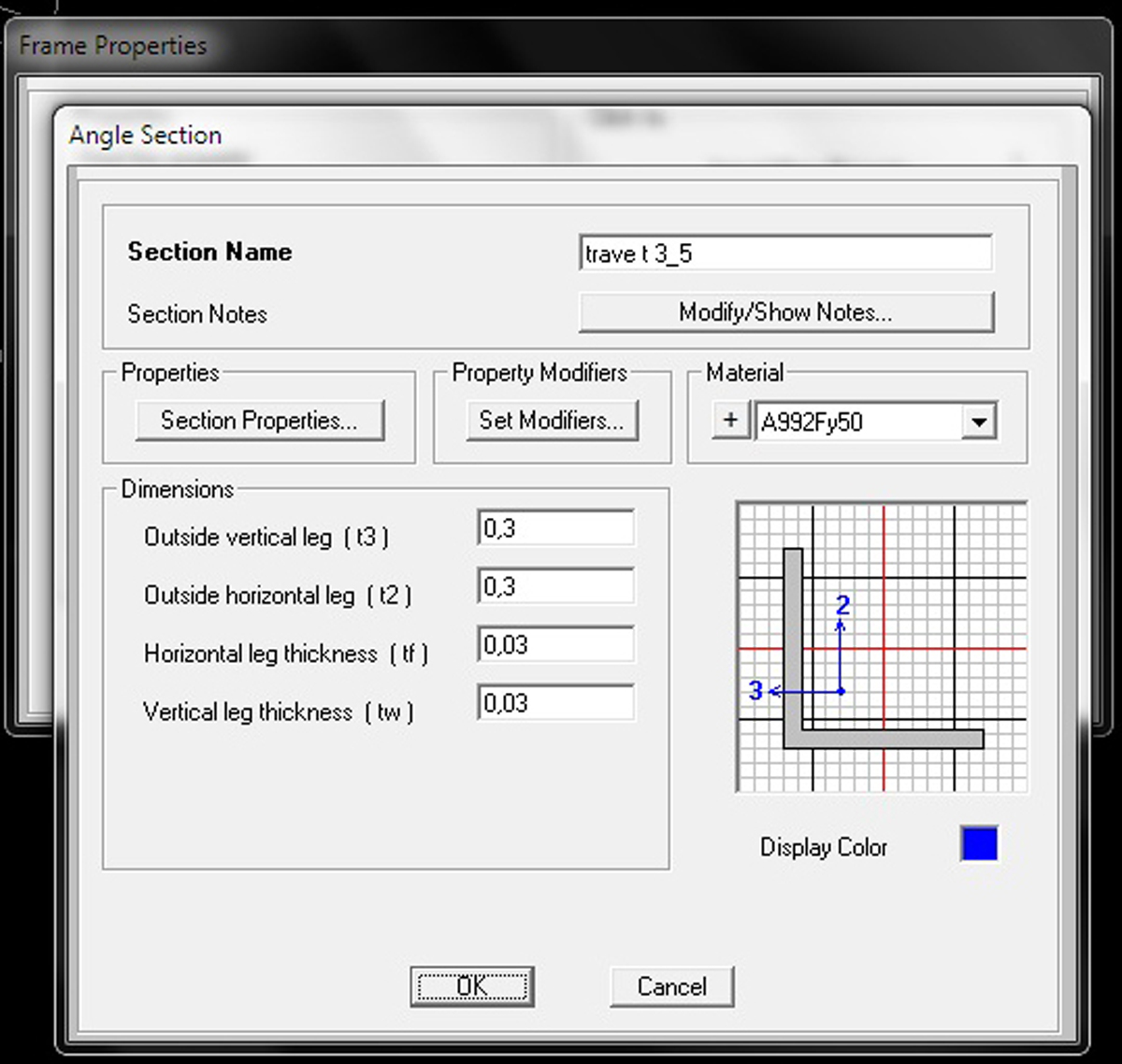
La seconda è una sezione rettangolare con la base molto minore dell’altezza:
-
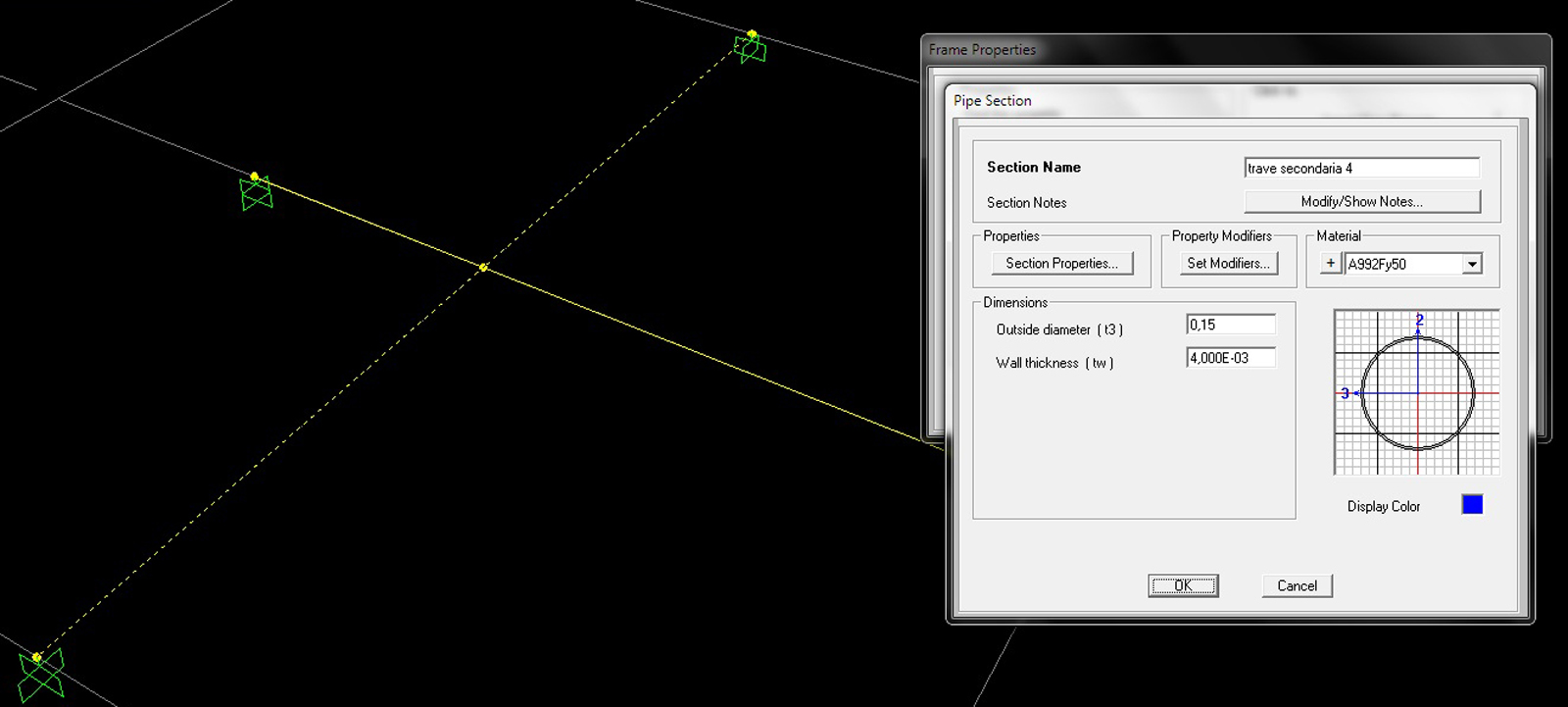
La terza e ultima è una sezione tubolare:
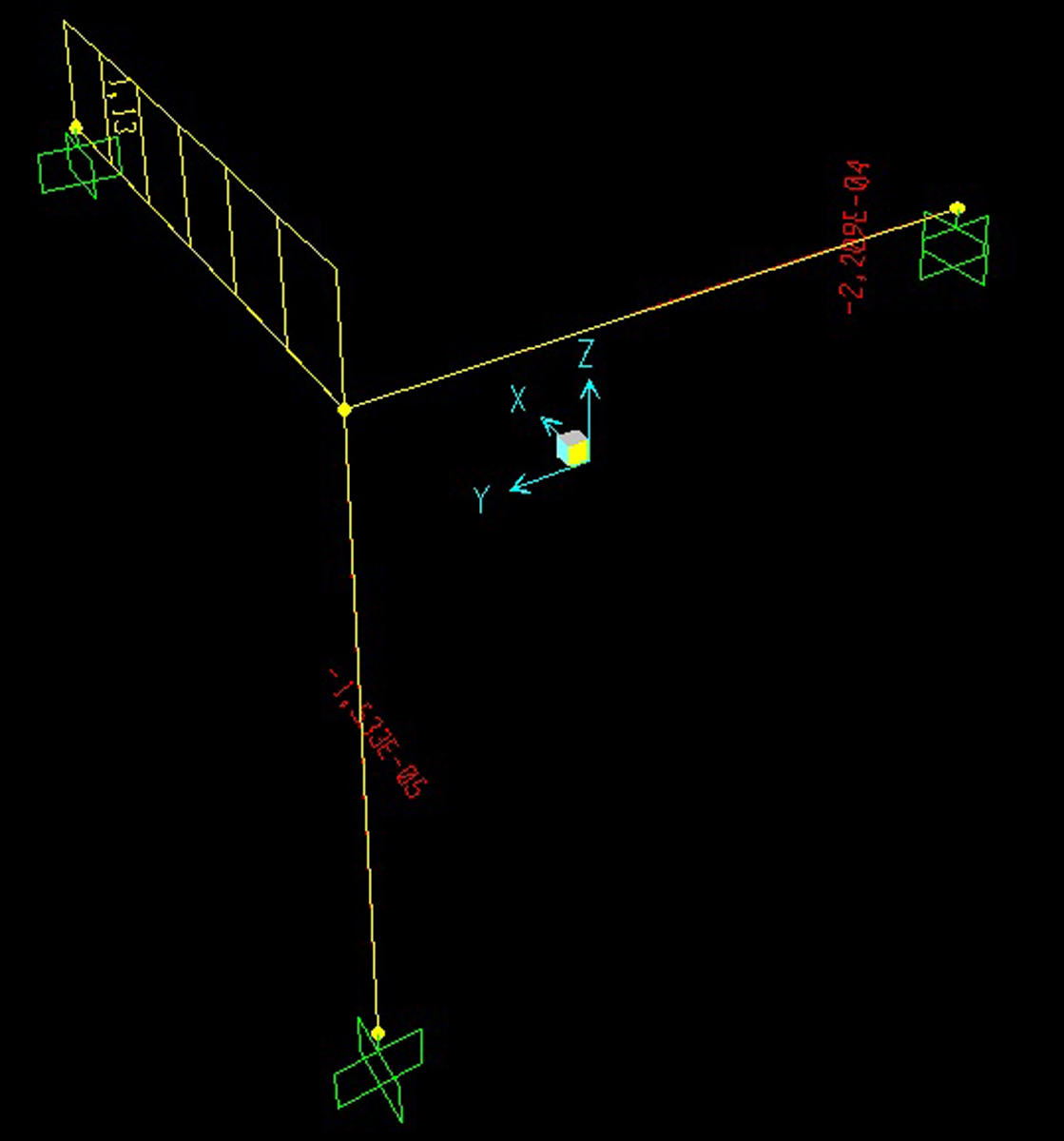
Le stesse sezioni sono state applicate dopo aver dimezzato la luce della trave. Di seguito lo schema iniziale e la deformata:
-
Questi sono i rispettivi diagrammi di Taglio, Momento flettente e Momento torcente:
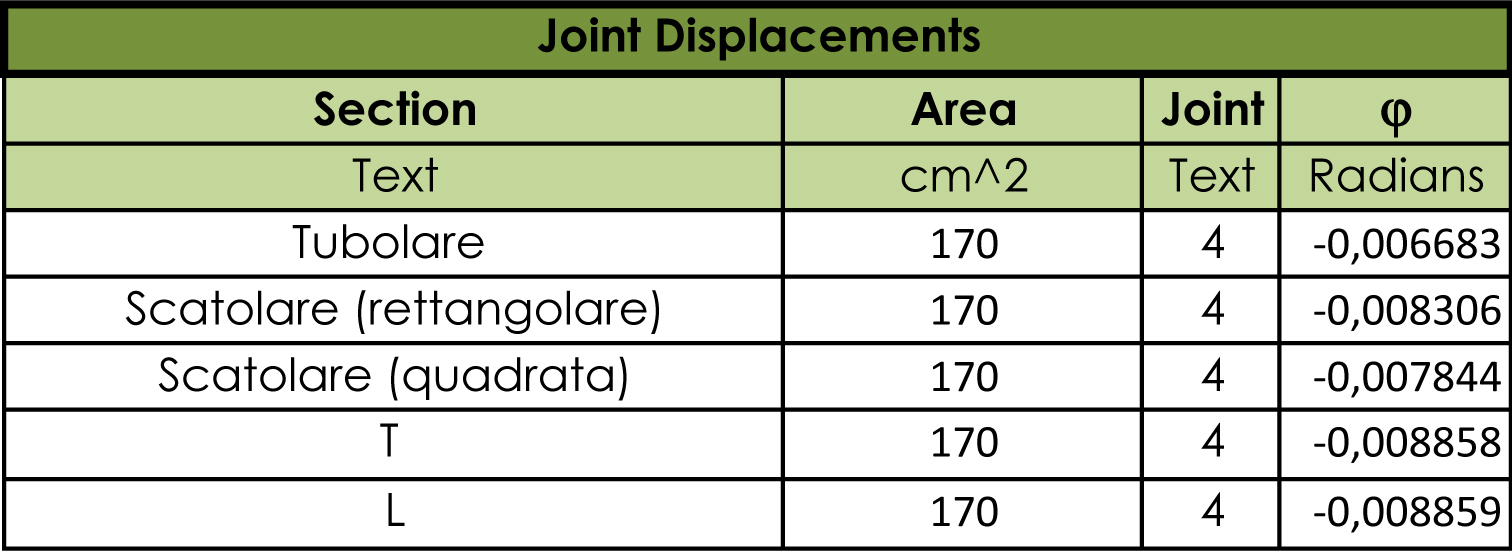
In queste tabelle sono riassunti i dati esportati da SAP relativi all’abbassamento  e alla rotazione jdel punto in comune alle 2 travi, nel quale viene applicata la forza agente F.
e alla rotazione jdel punto in comune alle 2 travi, nel quale viene applicata la forza agente F.
Le tabelle di sinistra fanno riferimento al caso di luce pari a 6 m, mentre quelle di destra al caso con luce pari a 3 m.

Come prevedibile, nei casi in cui alla trave soggetta a torsione sono stati associati profili chiusi (gli scatolari e i tubolari) essa ha garantito una maggiore rigidezza torsionale, limitando la rotazione del punto d’incontro delle travi.
Ricordiamo che la rotazione è inversamente proporzionale alla rigidezza del sistema, la quale in questo caso è data dalla somma della rigidezza flessionale della trave AC (mantenuta costante) e di quella torsionale della trave BD che abbiamo fatto variare per quantificare il suo contributo ai fini della rigidezza totale.











Commenti recenti