Esercitazione_5
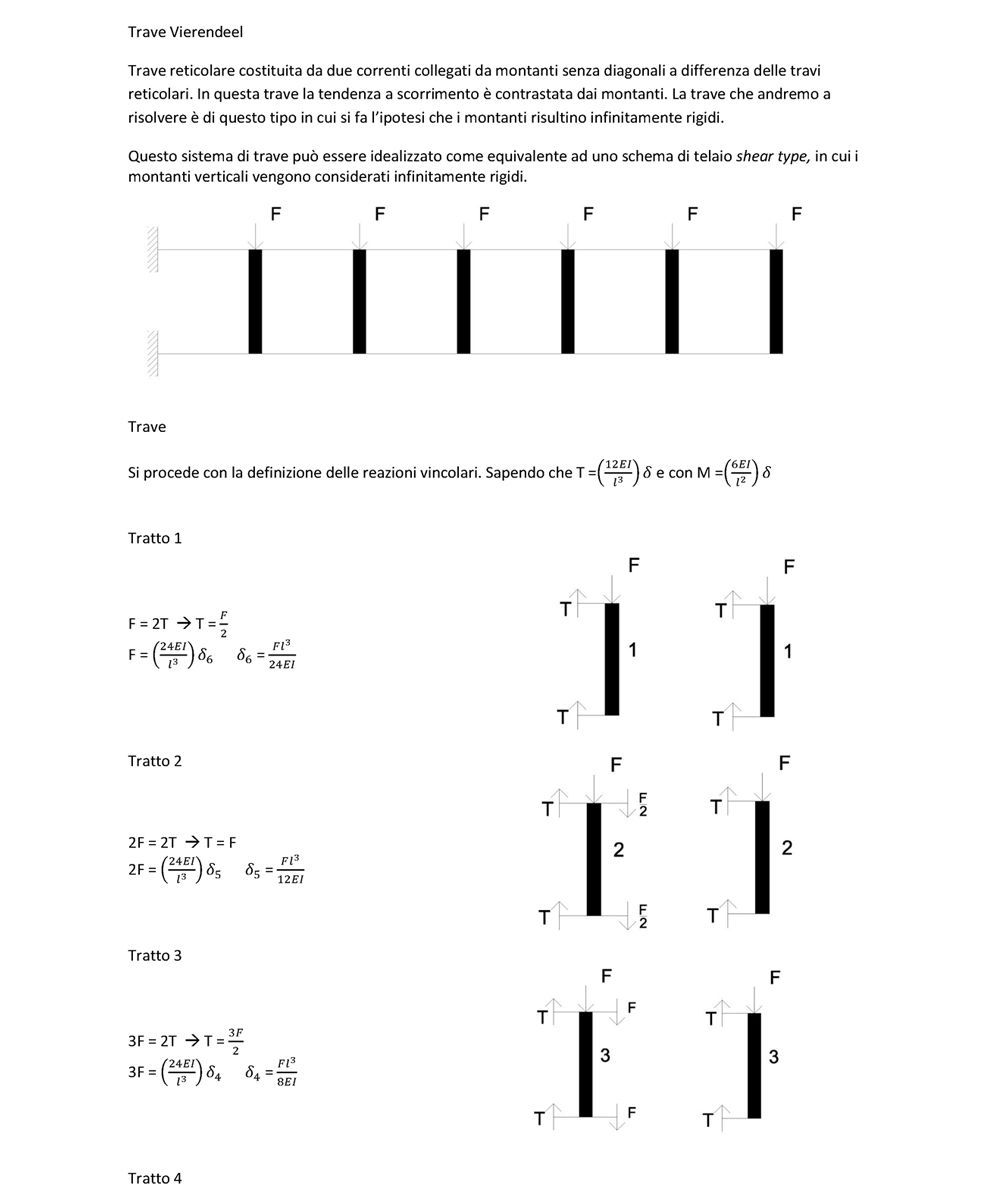
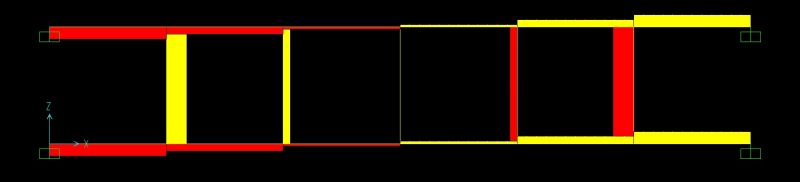
trave VIERENDEEL (metodo delle rigidezze)
1_
tipologia di esercizio
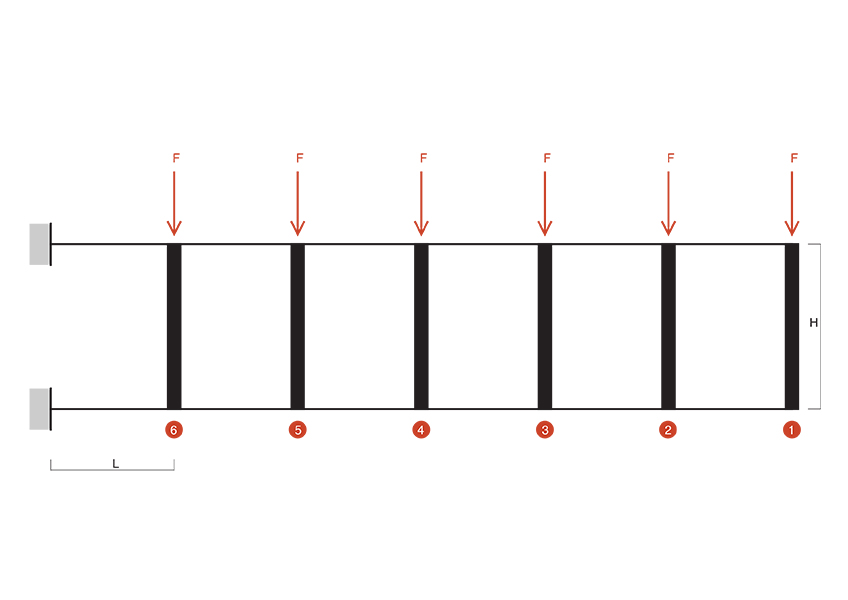
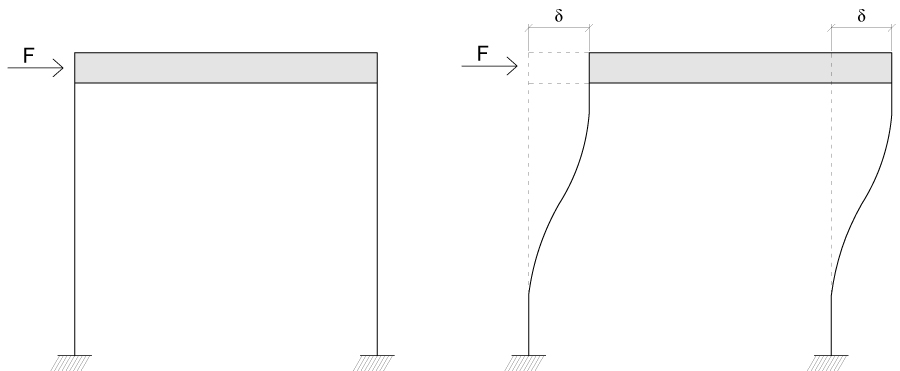
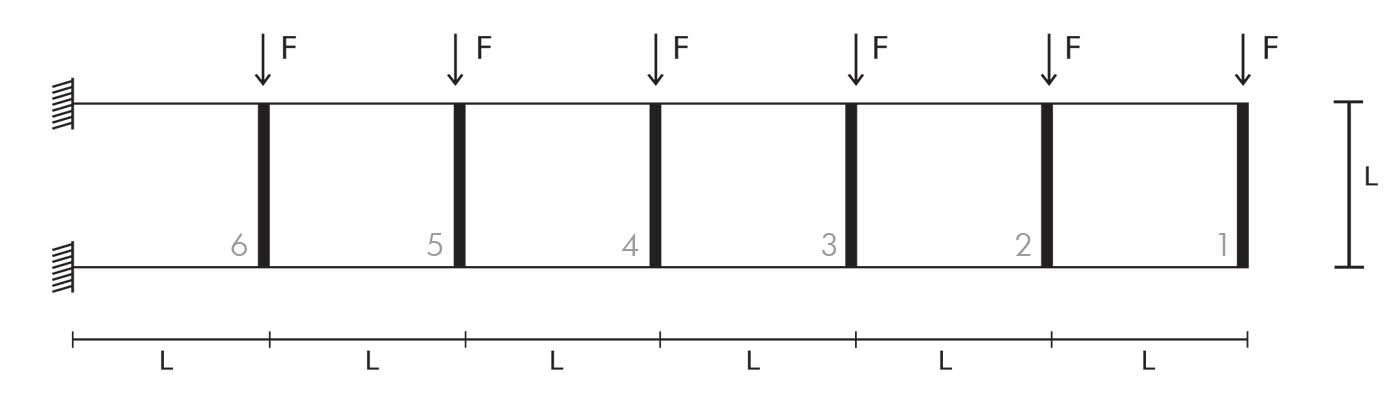
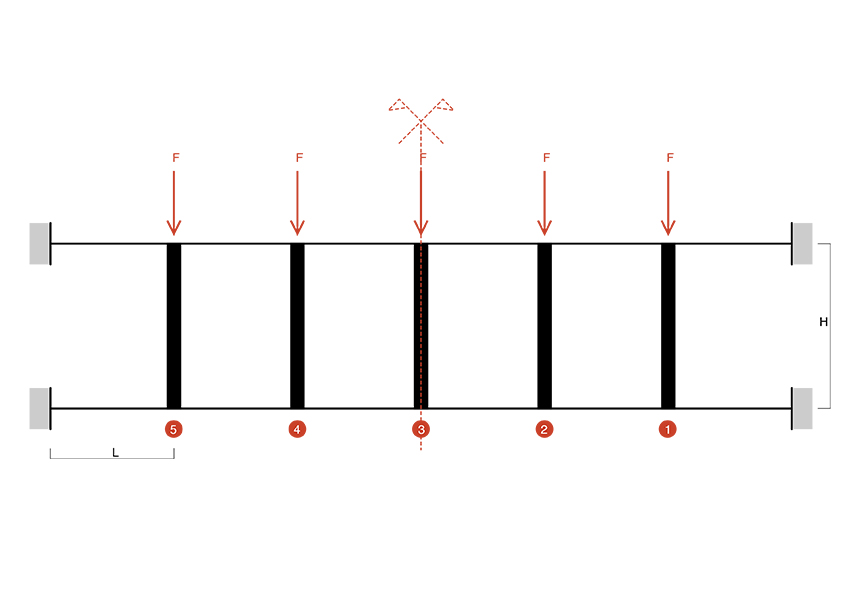
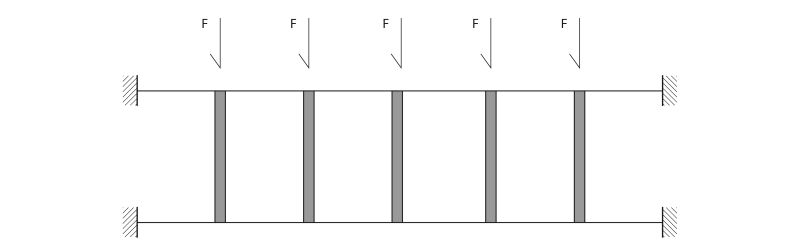
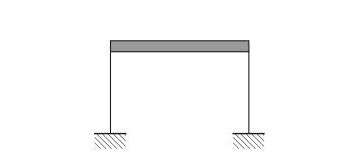
L’esercizio inquadra una struttura composta a telaio che usa lo schema del telaio Shear Type, questo tipo di analisi da come si potrà vedere, definirà valori del momento flettente molto minori rispetto al telaio con travi deformabili incernierate.
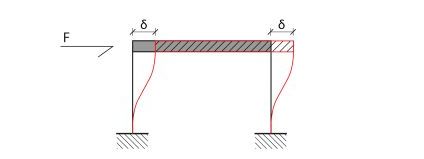
Come si potrà vedere successivamente la caratteristica principale del telaio Shear Type è quella di presentare una trave infinitamente rigida, la quale ha una rigidezza flessionale che ne impedisce la deformazione. I pilastri sono invece considerati deformabili, trascurandone però l’allungamento (il che avrebbe potuto generare una rotazione rigida della trave).
Fatta questa premessa sul sistema, si può comprendere come l’unico movimento che questo elemento può fare sia quello di traslare orizzontalmente.
2_
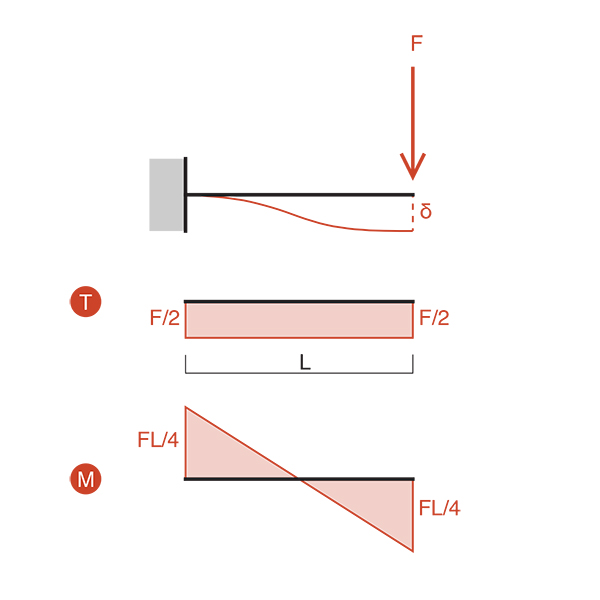
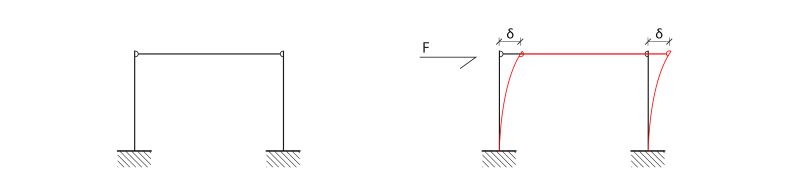
analisi tramite l’integrazione della linea elastica
Si procede quindi con l’analisi dello spostamento δ ipotizzando un cedimento vincolare elastico in uno dei due estremi e analizzando la curvatura (in una struttura iperstatica un cedimento provoca una curvatura e di conseguenza una tensione) ed il momento flettente (analizzando la deformata e definendone il punto di flesso, possiamo dire che in quel punto il grafico del momento si annullerà).
Si procede quindi all’applicazione del metodo della linea elastica:
vs= (C₁*s³/6) + (C₂*s²/2) + (C₃*s) + C₄
φ(s)= (C₁*s²/2) + (C₂*s) + C₃
3_
analisi della deformata
Successivamente definisco le condizioni al bordo:
_estremo sinistro - incastro: s= 0
In questo punto lo spostamento verticale e la rotazione della sezione della trave risultano essere pari a zero, quindi abbiamo:
v(0)= 0
φ(0)= 0
Sostituendo le due condizioni risultanti nelle rispettive equazioni, derivate sempre dall’integrazione dell’equazione della linea elastica per lo spostamento verticale a cui facciamo riferimento (q(s)= (d⁴v/ds⁴)*E*J) si può constatare che C₃ e C₄ sono nulle.
v(0)= 0 ⇒ C₄= 0
φ(0)= 0 ⇒ C₃*s = 0
_estremo destro - incastro: s= L
In questo punto lo spostamento verticale e la rotazione della sezione della trave risultano essere pari a zero, quindi abbiamo:
v(L)= 0
φ(L)= 0
Sostituendo le due condizioni risultanti nelle rispettive equazioni, derivate sempre dall’integrazione dell’equazione della linea elastica per lo spostamento verticale a cui facciamo riferimento (q(s)= (d⁴v/ds⁴)*E*J) si può constatare che C₃ e C₄ sono nulle.
v(L) = -δ ⇒ C₂= -((6/L²)*δ)
φ(L) = 0 ⇒ C₁= ((12/L³)* δ)
4_
equazione di spostamento e rotazione
Sostituendo i valori definiti dall’analisi delle condizioni al bordo della trave possiamo definire le equazioni di spostamento e rotazione:
vs= (C₁*s³/6) + (C₂*s²/2) + (C₃*s) + C₄
⇒ C₁= ((12/L³)* δ) ⎫
⎬ ⇒ vs= (((12/L³)* δ)*s³/6) - (((6/L²)*δ)*s²/2)
⇒ C₂= -((6/L²)*δ) ⎭
φ(s)= (C₁*s²/2) + (C₂*s) + C₃
⇒ C₁= ((12/L³)* δ) ⎫
⎬ ⇒ φ(s)= (((12/L³)* δ)*s²/2) + (((6/L²)*δ)*s) + C₃
⇒ C₂= -((6/L²)*δ) ⎭
Si procede derivando l’equazione della rotazione per ottenere la curvatura, ricavandoci il momento flettente e derivando l’equazione del momento flettente ricavandoci il valore del taglio:
φ(s)’= χ ⇒ χ= (((12/L³)* δ)* s) - ((6/L²)*δ)
M= E*J*χ ⇒ M= (E*J)*((((12/L³)* δ)* s) - ((6/L²)*δ))
T= -Ms‘ ⇒ T= -((E*J)*(12/L³)* δ)
5_
calcolo dello spostamento e della rigidezza
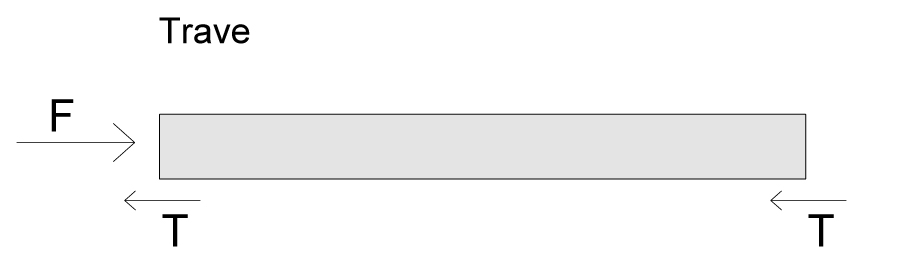
Attraverso l’equilibrio alla traslazione orizzontale si arriva a definire la relazione che lega lo spostamento δ con lo sforzo di taglio a cui sono soggetti i pilastri. Infatti questi sono legati da una proporzionalità diretta tramite un fattore k definito come rigidezza del pilastro.
F= 2T ⇒ F= (2* (E*J)*(12/L³)* δ)
F= ((E*J)*(24/L³)* δ) ⇒ δ= ((F*L³)/(24*E*J))
⇒ k= ((24*E*J)/L³)
6_
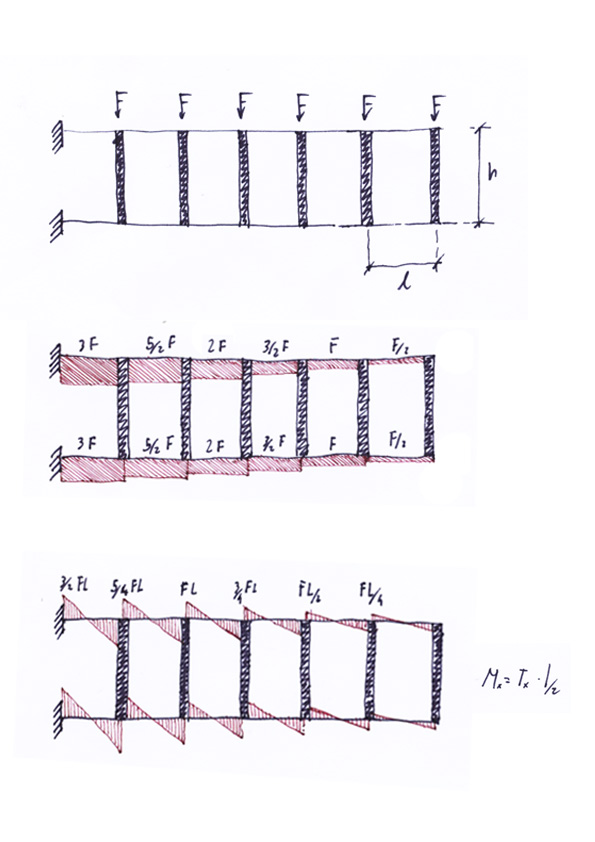
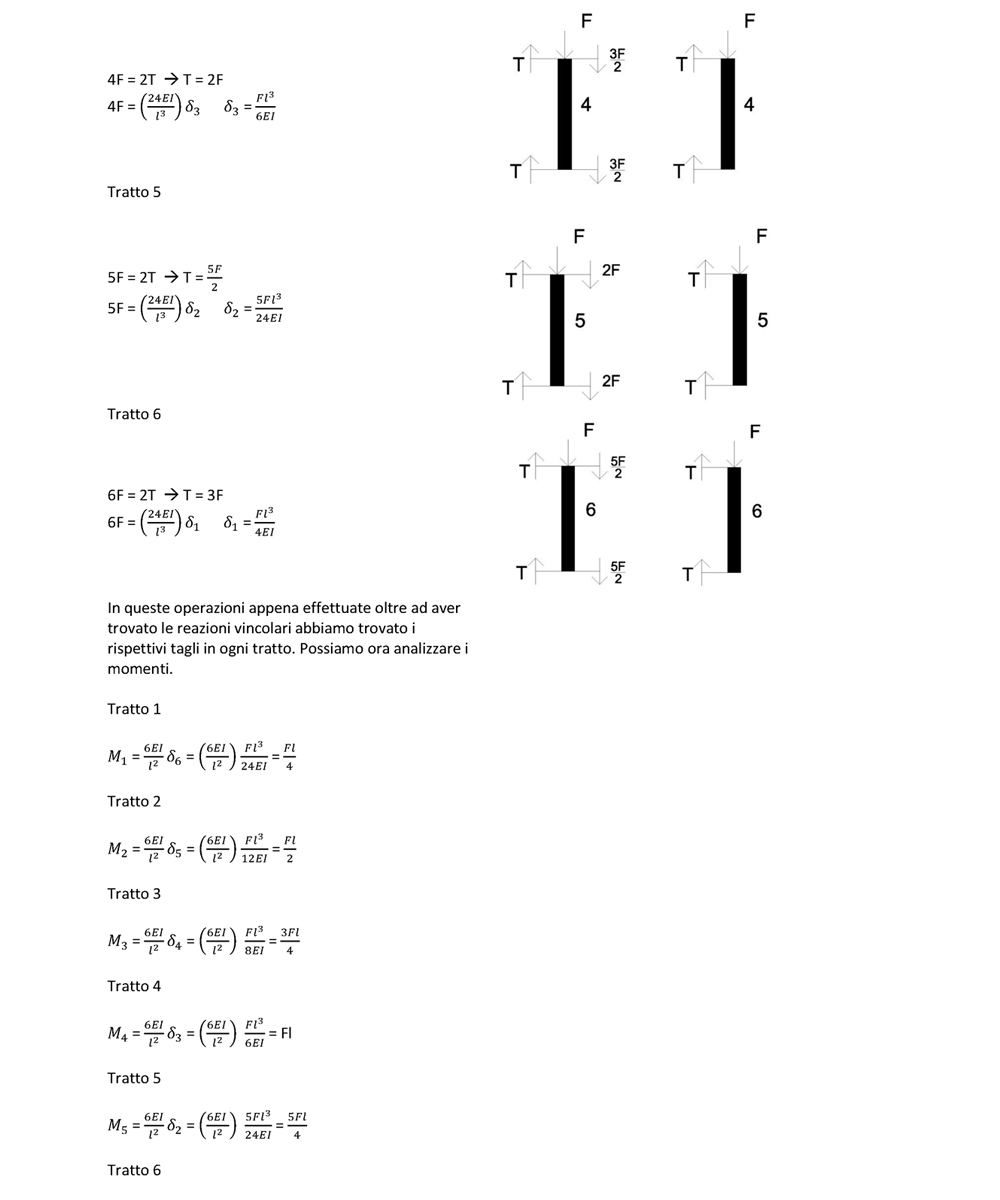
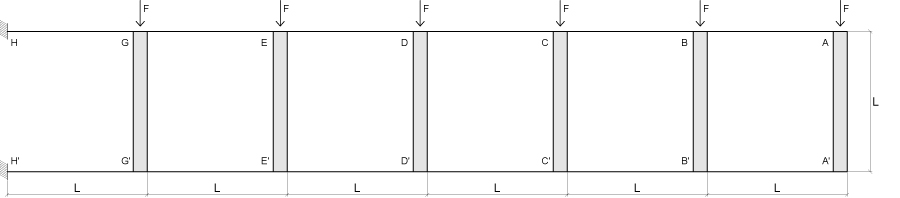
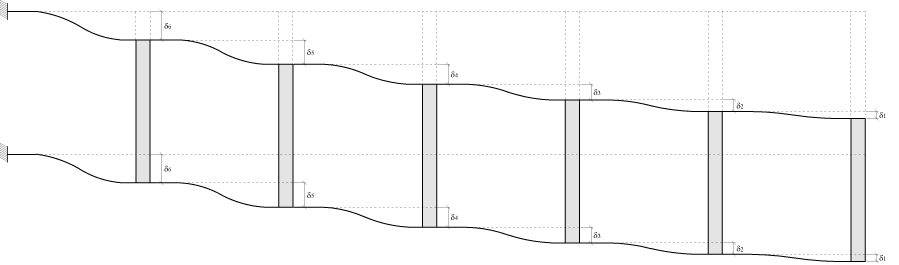
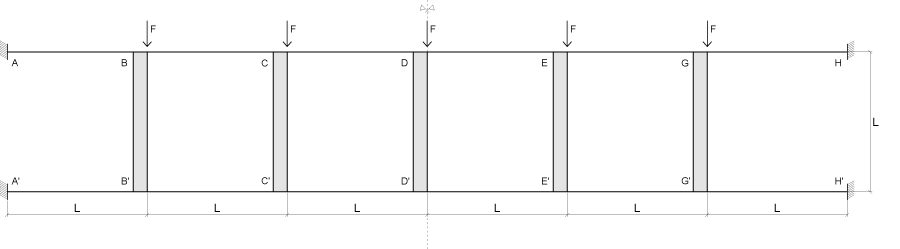
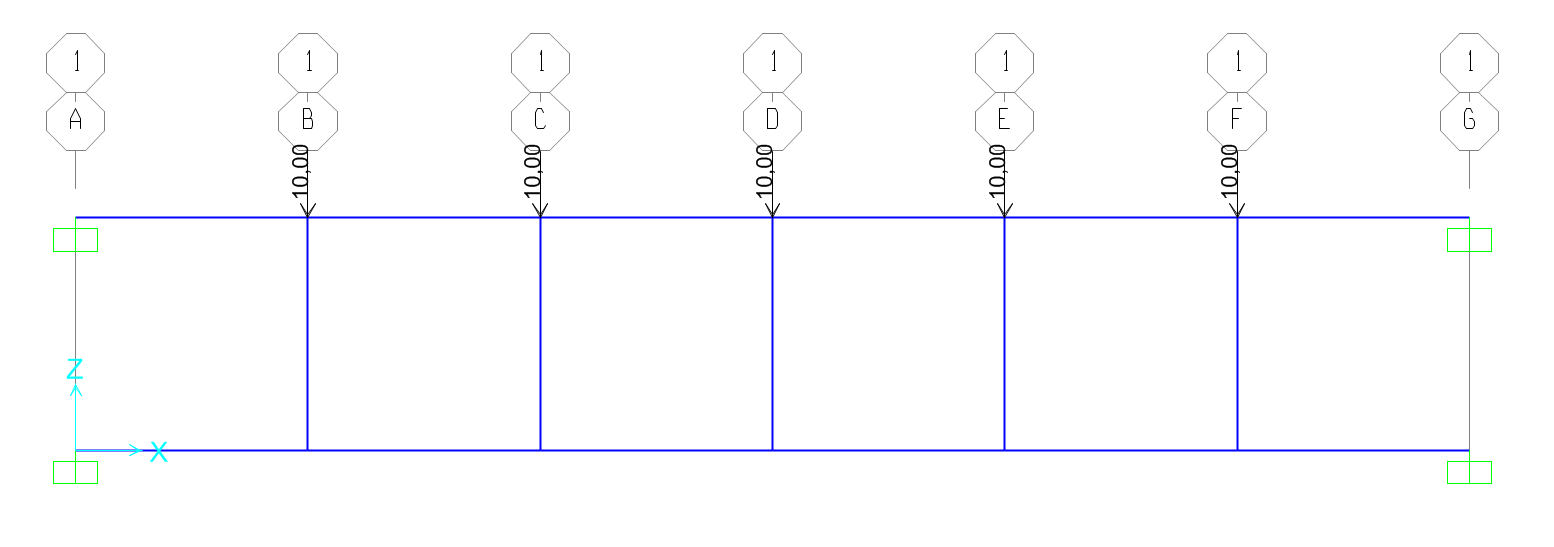
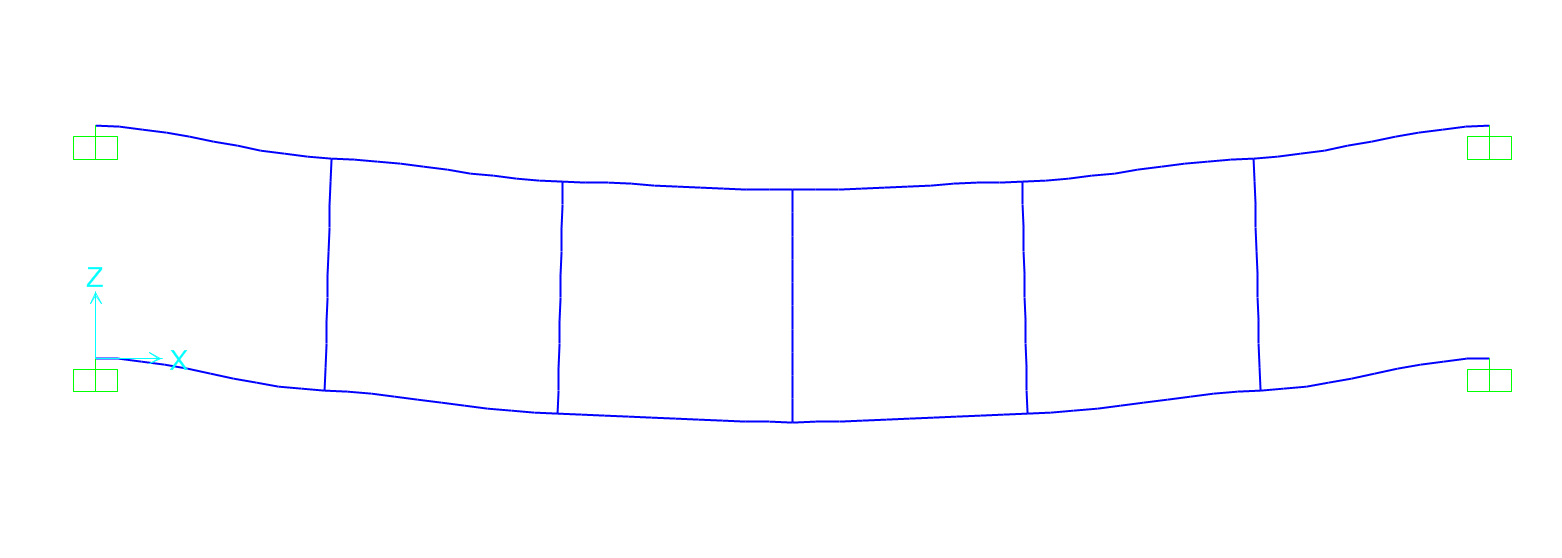
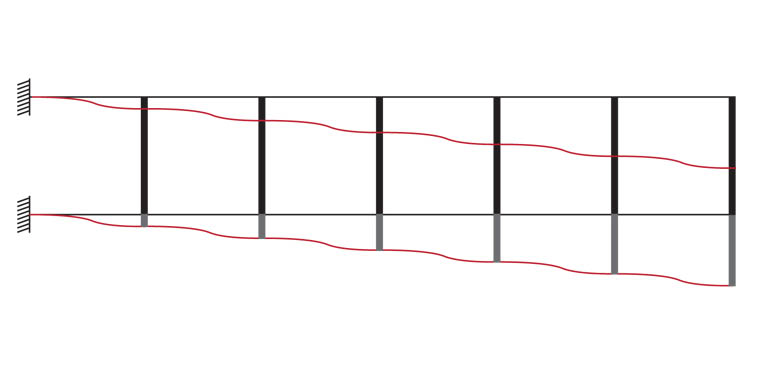
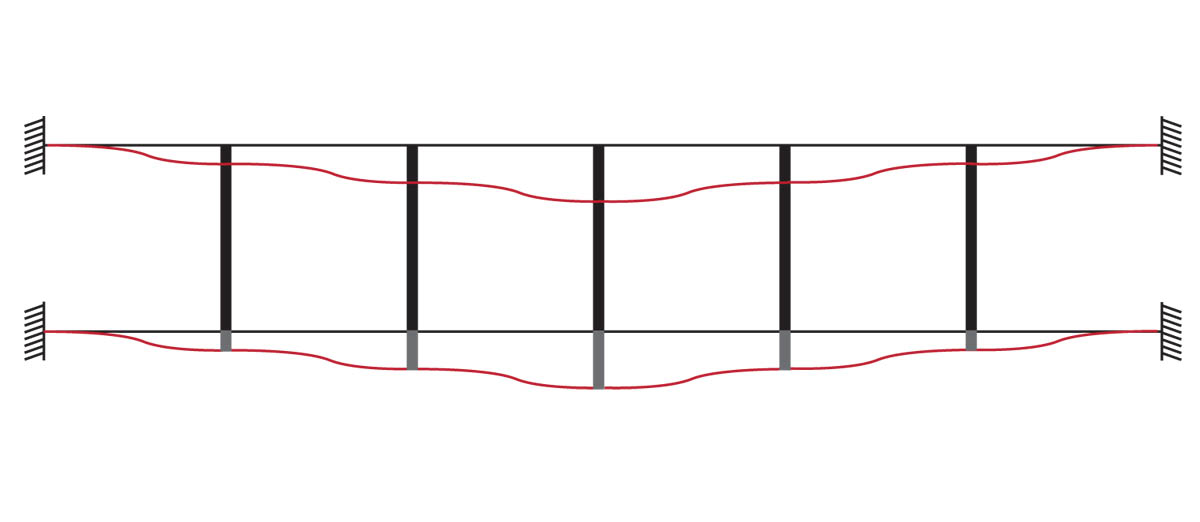
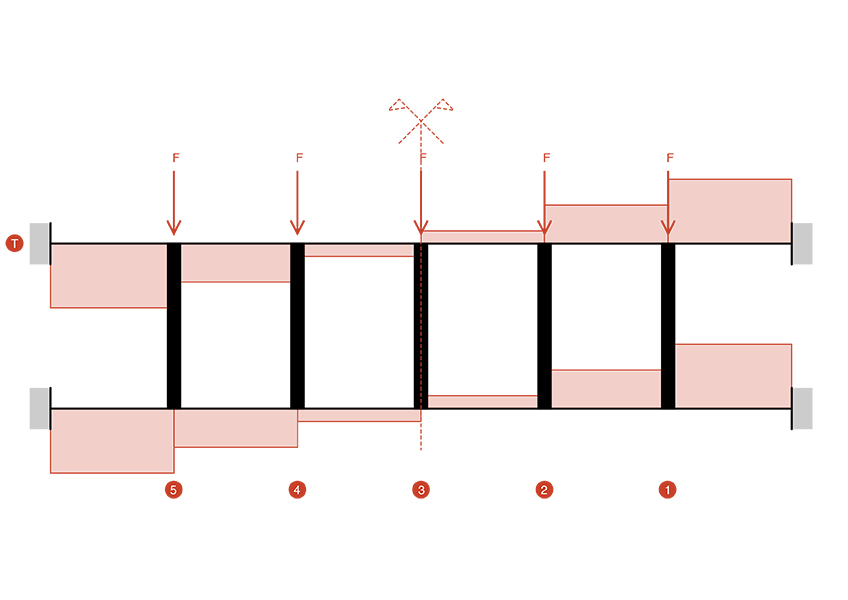
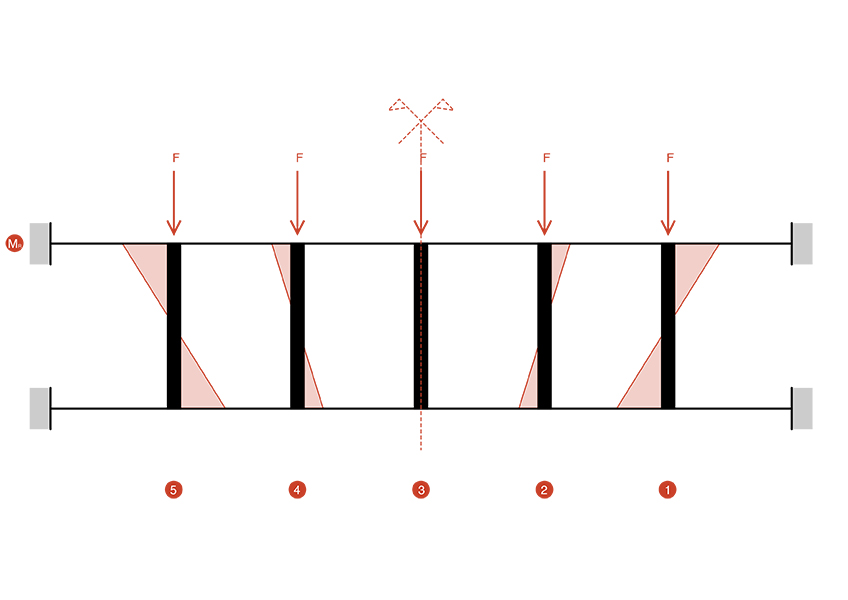
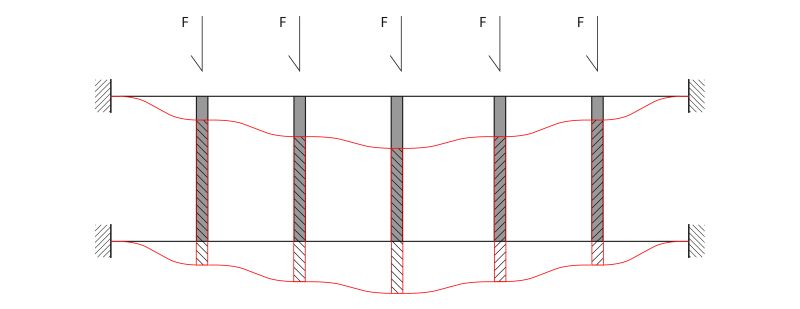
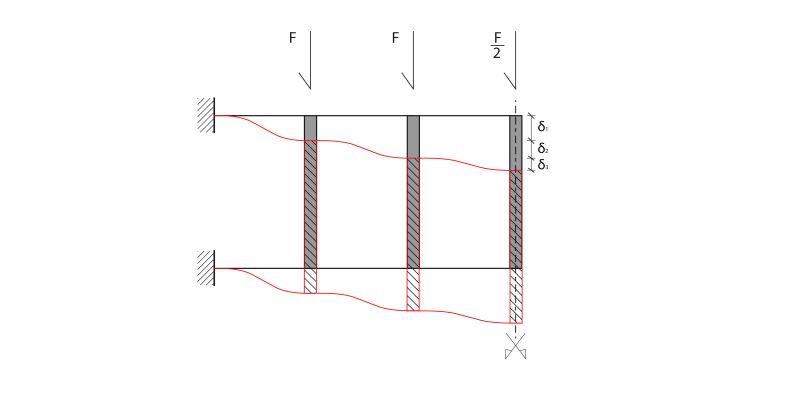
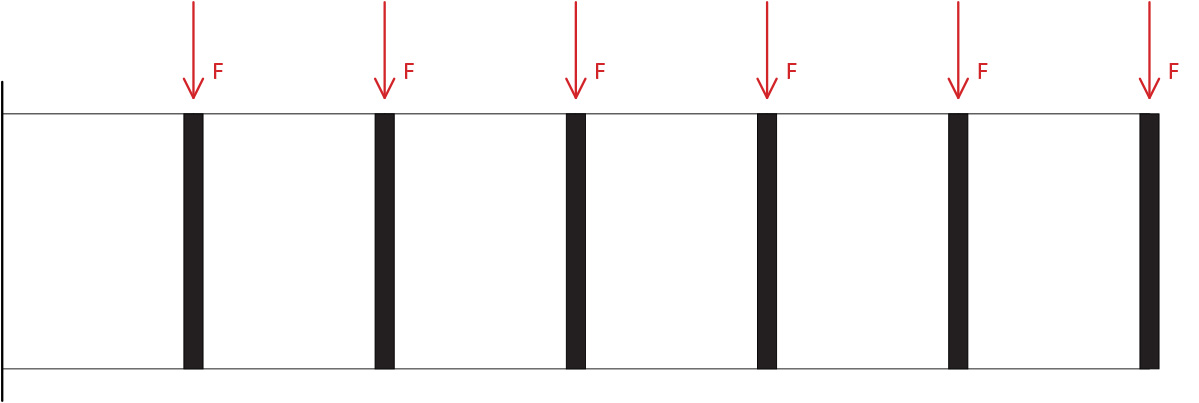
analisi della trave Vierendeel
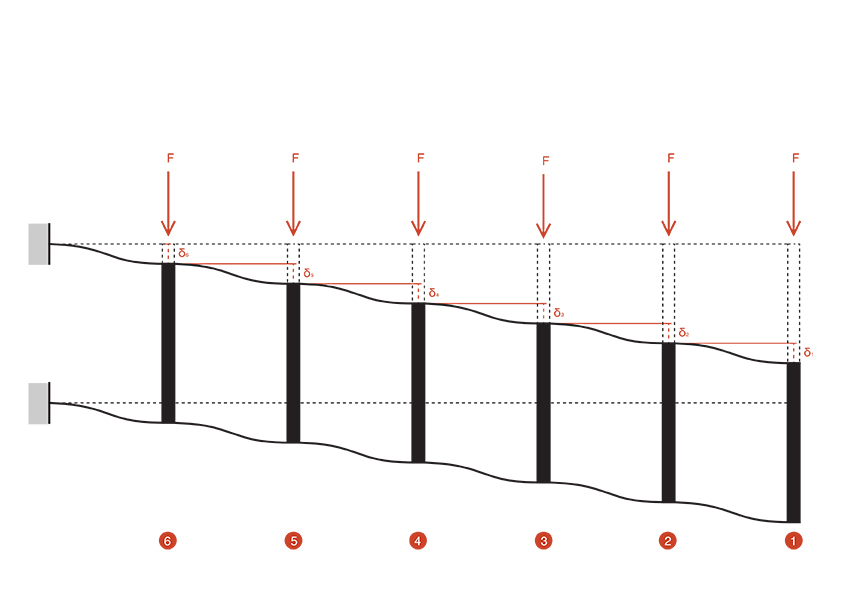
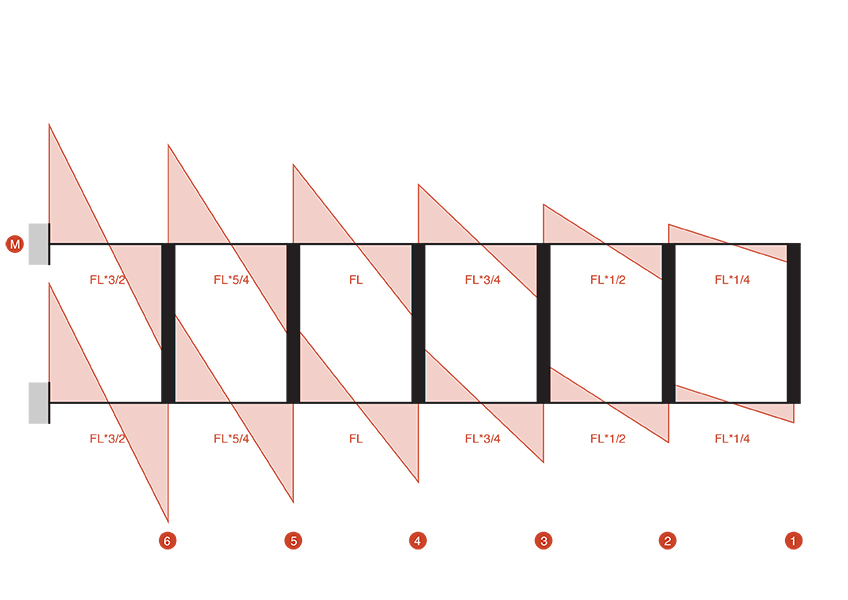
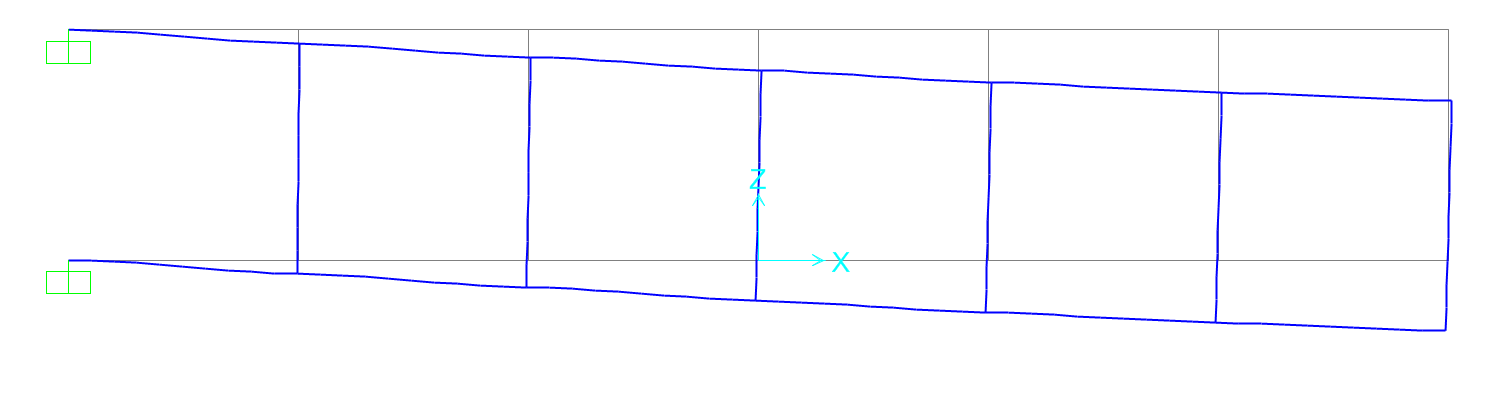
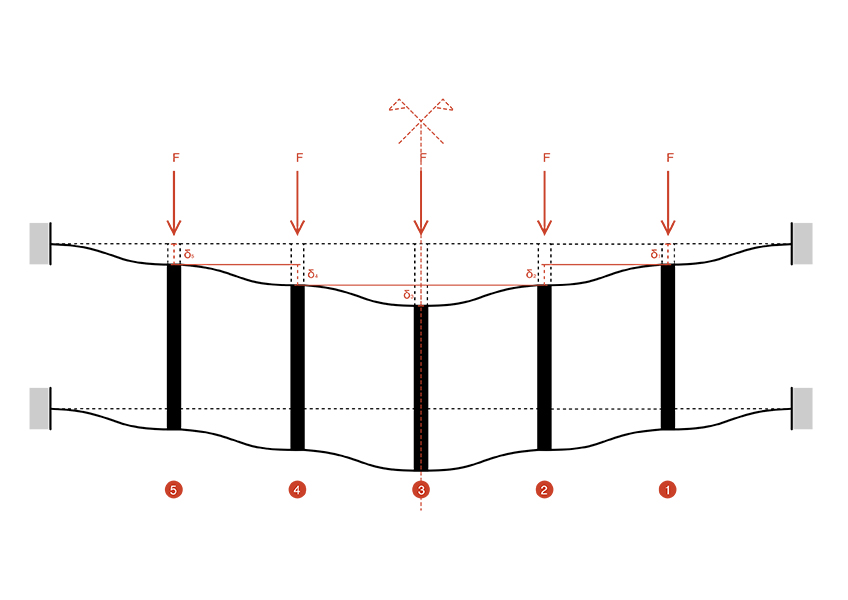
Dall’analisi della deformata della singola trave possiamo ricavare la deformata completa della trave Vierendeel:
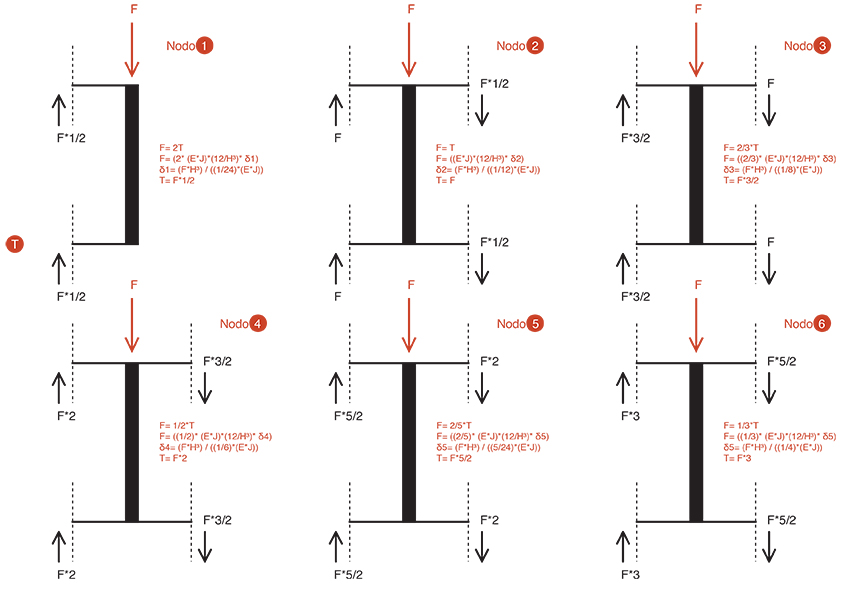
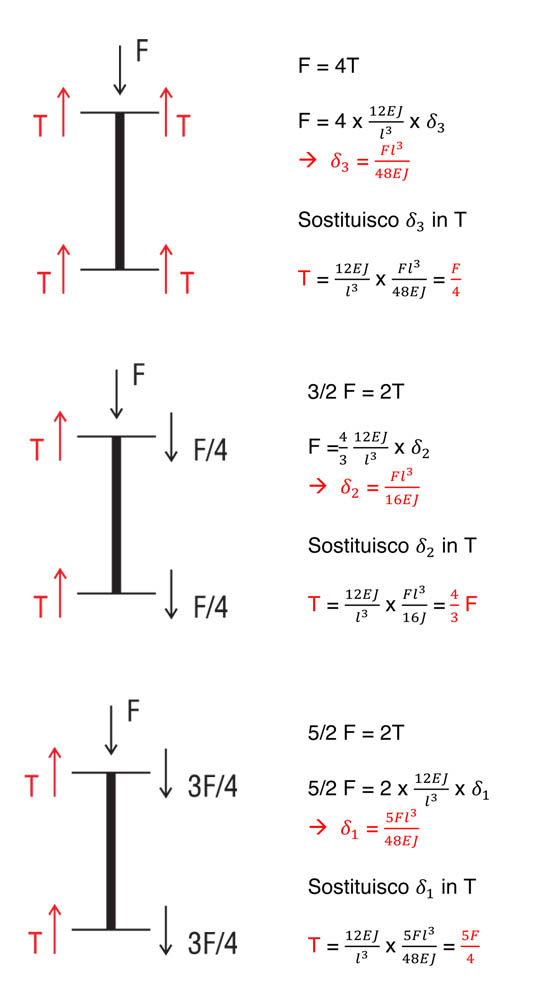
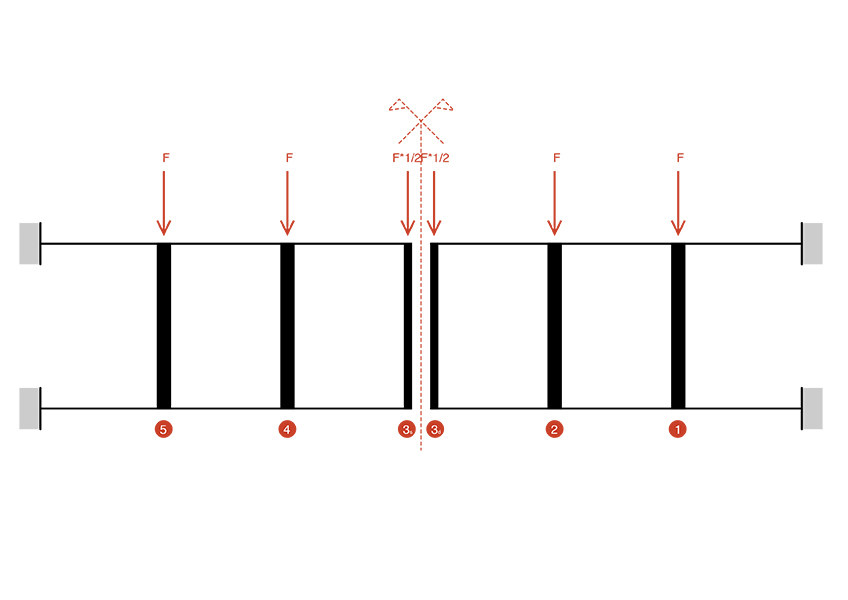
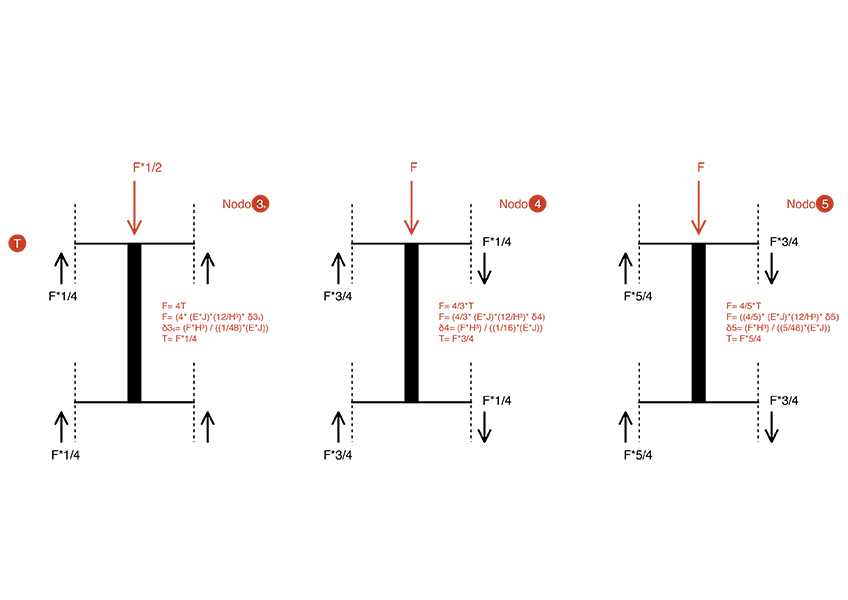
Passiamo al calcolo del taglio utilizzando l’equilibrio delle forze orizzontali, il quale risulta essere costante nei ritti. Dalla precedente analisi si è quindi capito che la forza agente si ripartisce in maniera proporzionale alla rigidezza e alla luce. Presentando quindi i ritti le stesse caratteristiche in quanto: lunghezza, materiale, sezione; da queste premesse si può capire che quest’ultimi avranno la stessa rigidezza, quindi su ognuno di loro insisterà metà della forza agente.
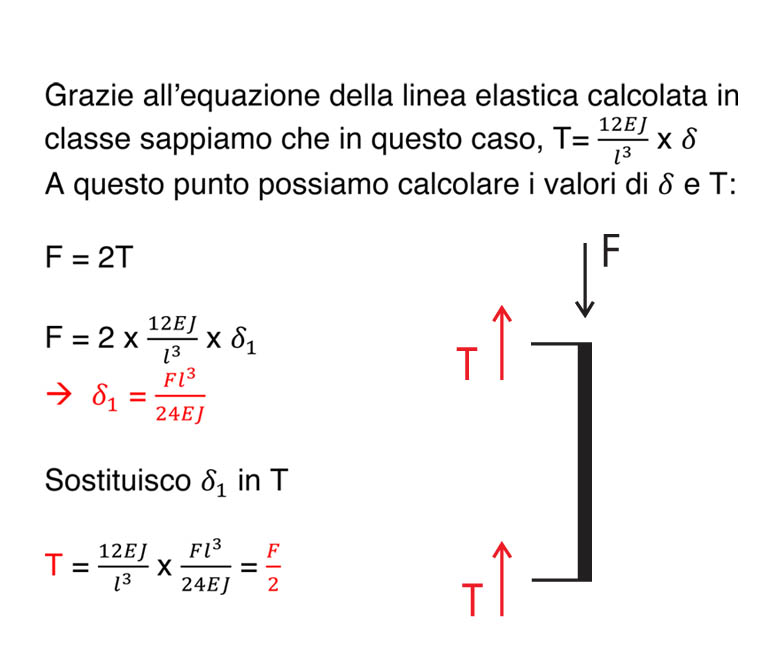
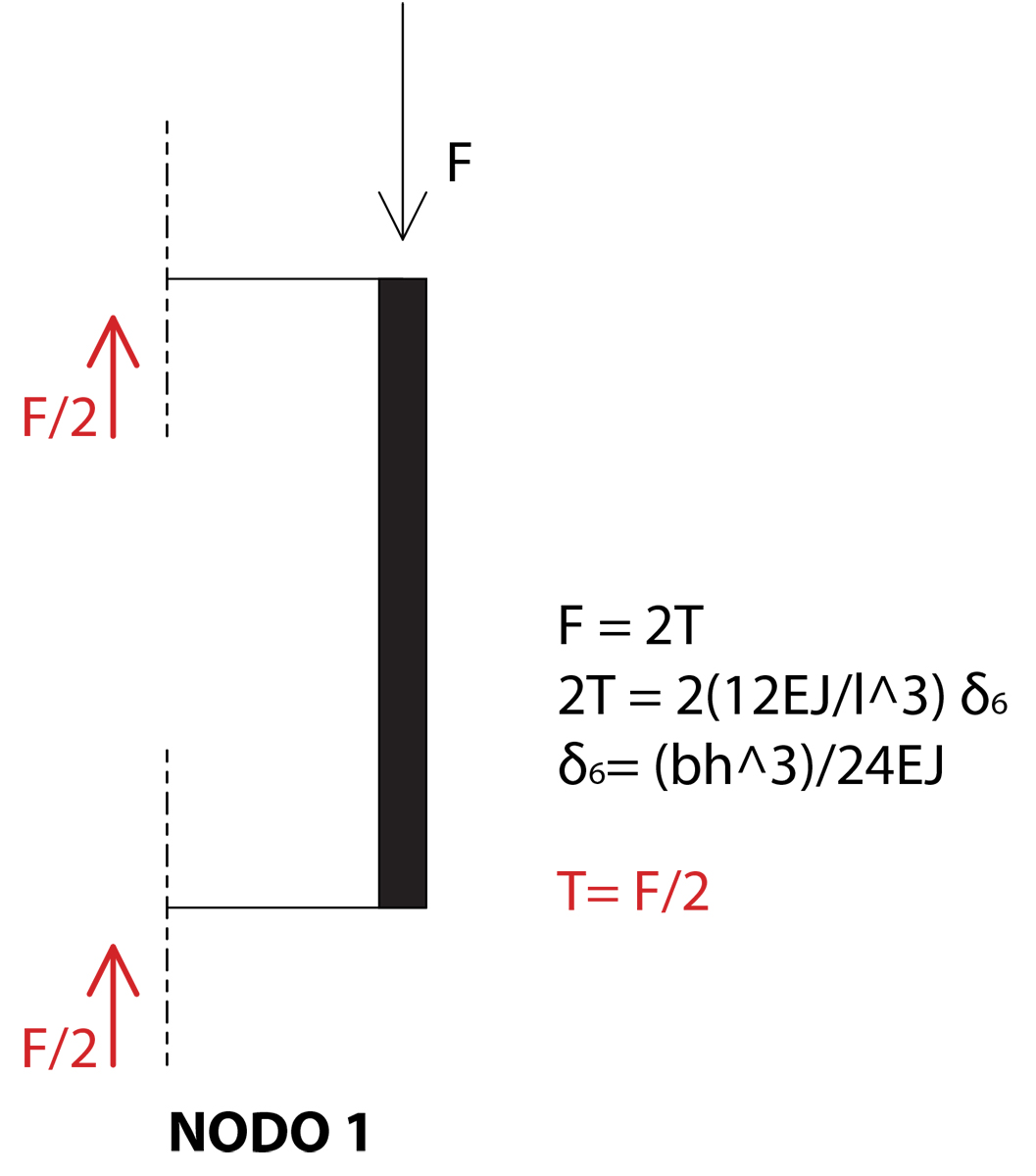
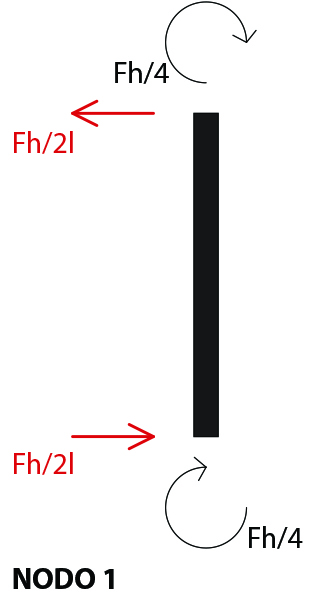
Nodo_1
F= 2T
F= (2* (E*J)*(12/H³)* δ1)
δ1= (F*H³) / ((1/24)*(E*J)) ⇒ T= F*1/2
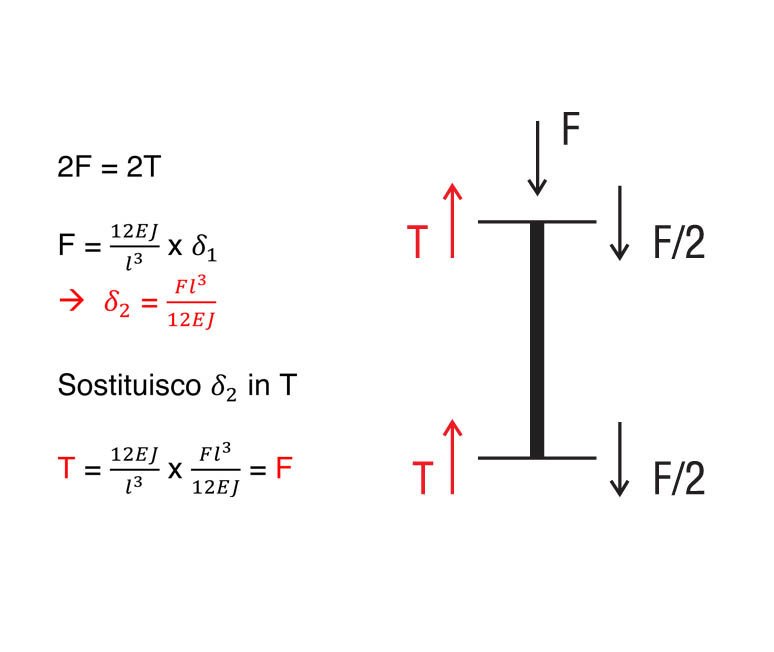
Nodo_2
F= T
F= ((E*J)*(12/H³)* δ2)
δ2= (F*H³) / ((1/12)*(E*J)) ⇒ T= F
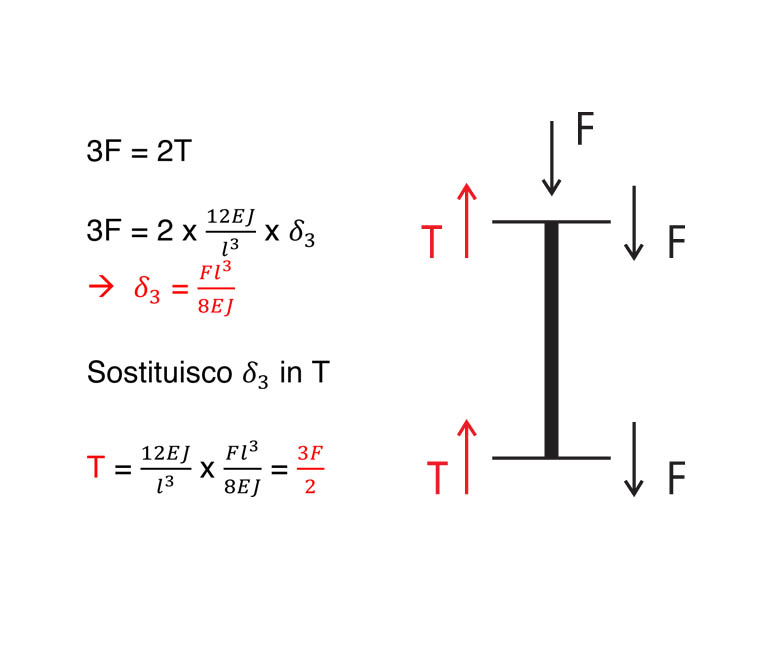
Nodo_3
F= 2/3*T
F= ((2/3)* (E*J)*(12/H³)* δ3)
δ3= (F*H³) / ((1/8)*(E*J)) ⇒ T= F*3/2
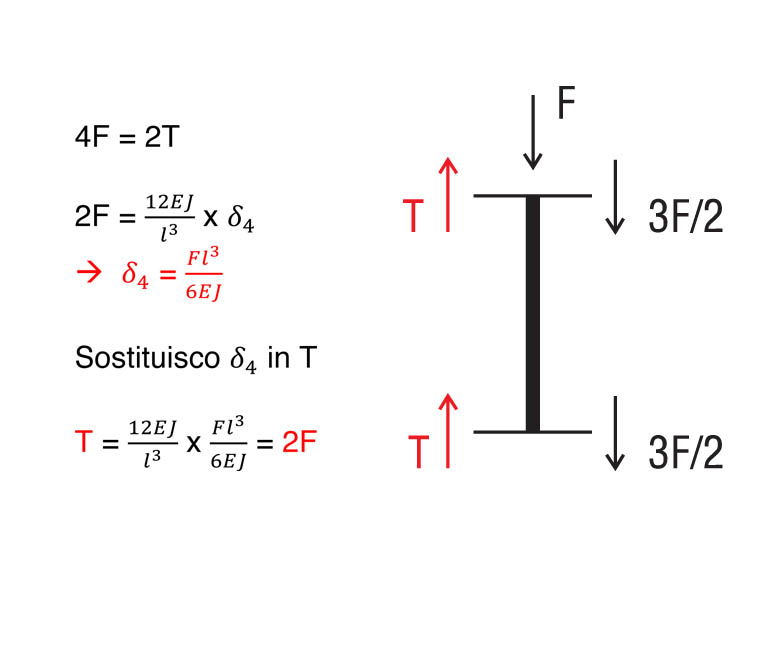
Nodo_4
F= 1/2*T
F= ((1/2)* (E*J)*(12/H³)* δ4)
δ4= (F*H³) / ((1/6)*(E*J)) ⇒ T= F*2
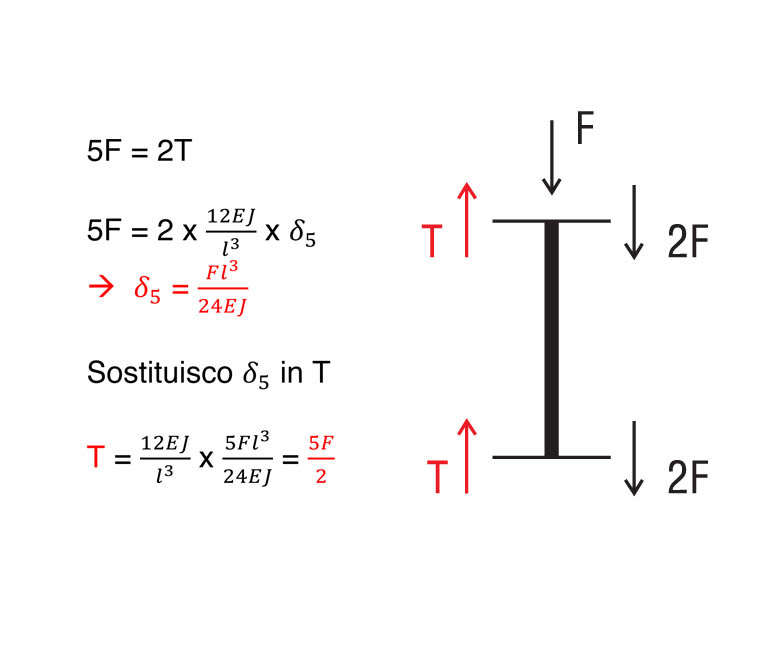
Nodo_5
F= 2/5*T
F= ((2/5)* (E*J)*(12/H³)* δ5)
δ5= (F*H³) / ((5/24)*(E*J)) ⇒ T= F*5/2
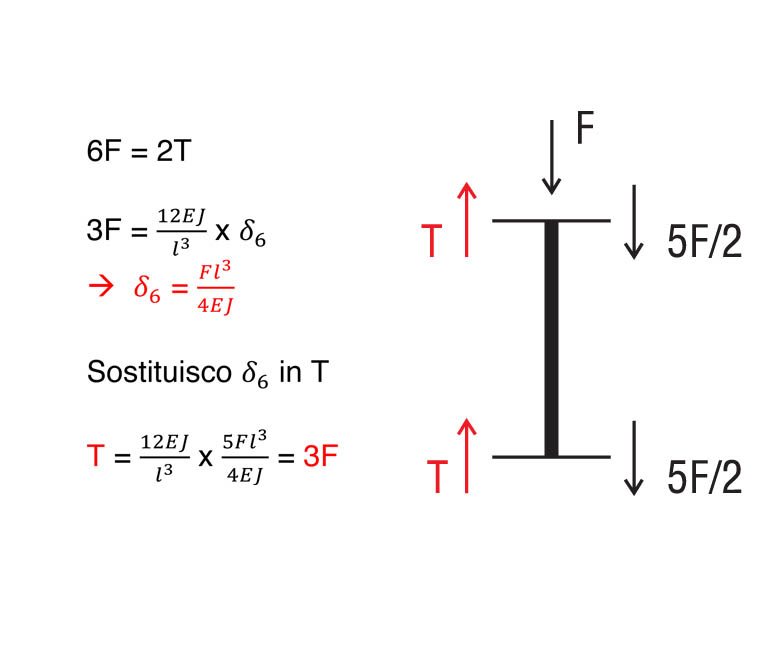
Nodo_6
F= 1/3*T
F= ((1/3)* (E*J)*(12/H³)* δ5)
δ5= (F*H³) / ((1/4)*(E*J)) ⇒ T= F*3
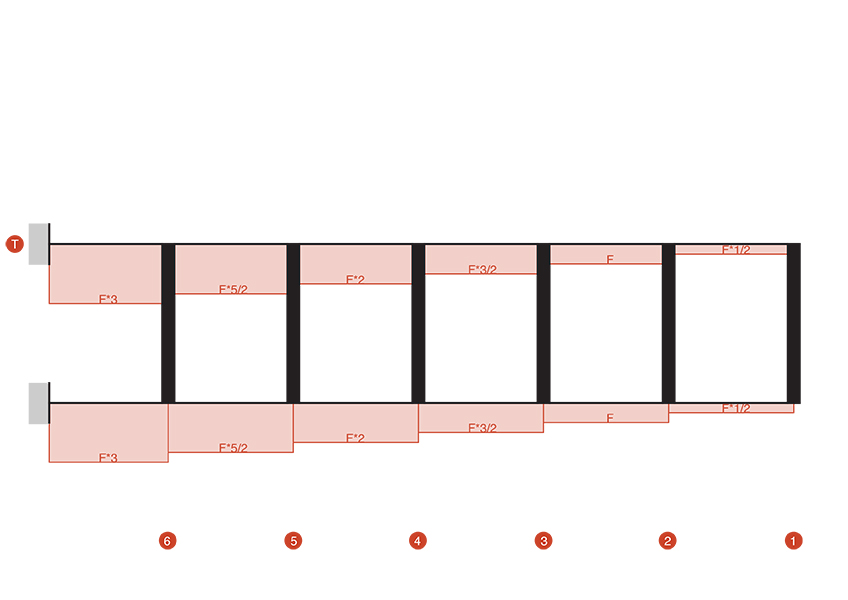
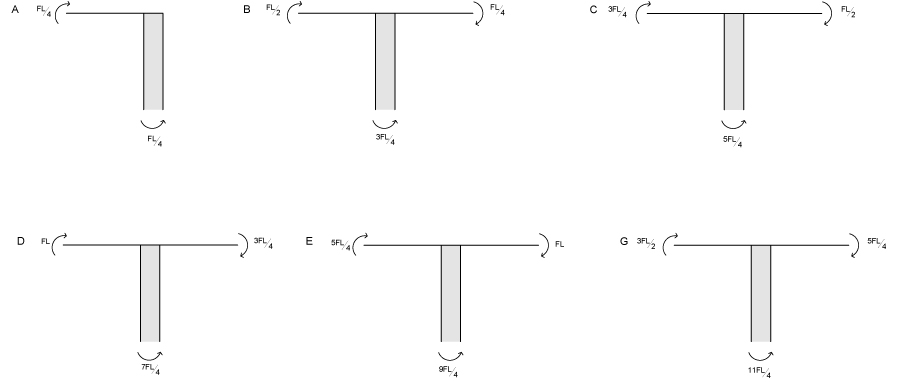
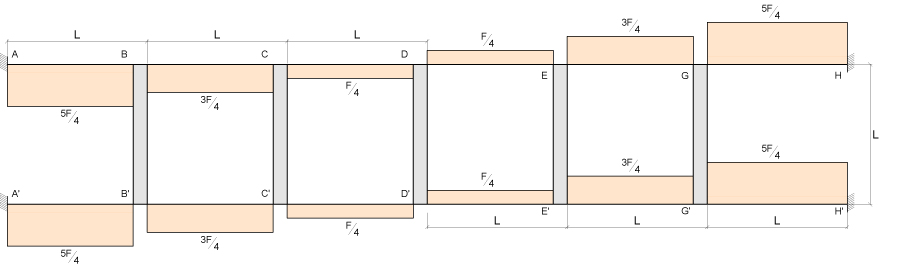
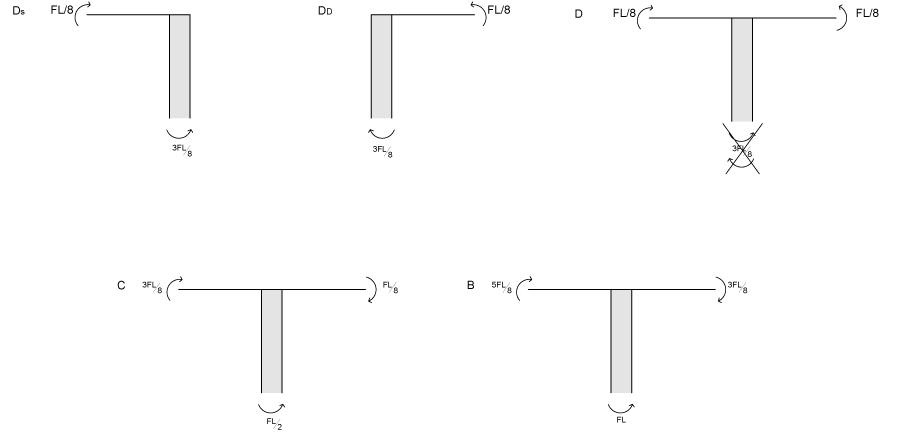
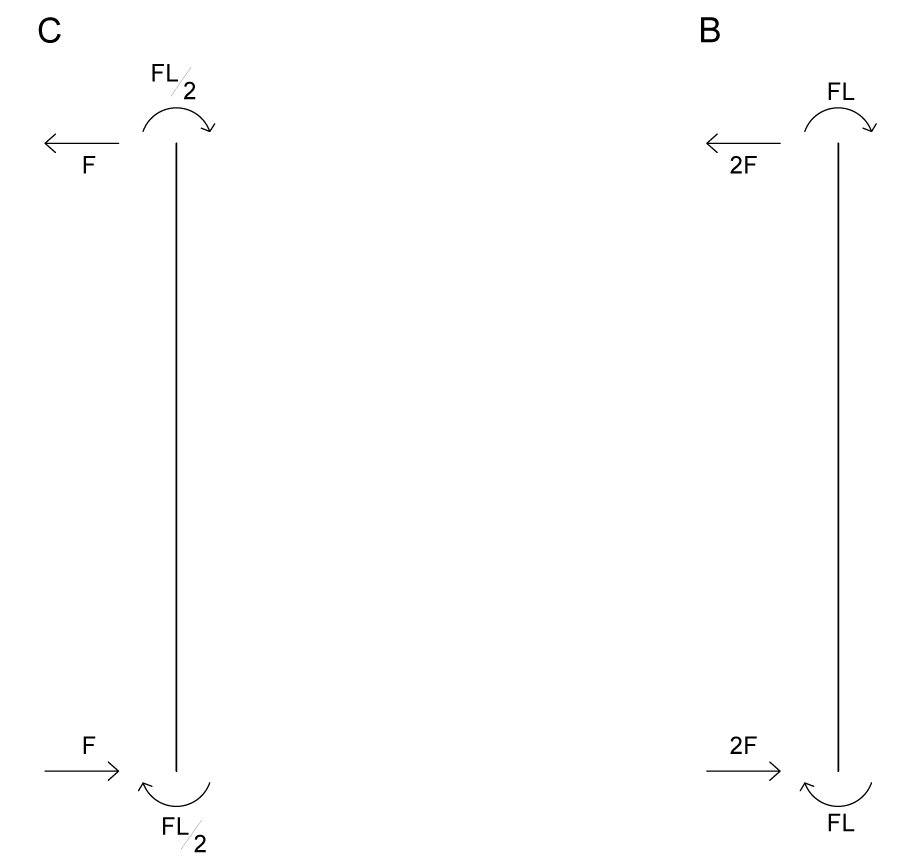
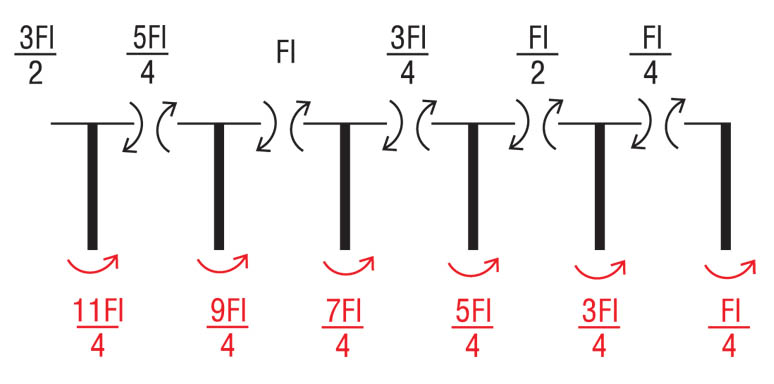
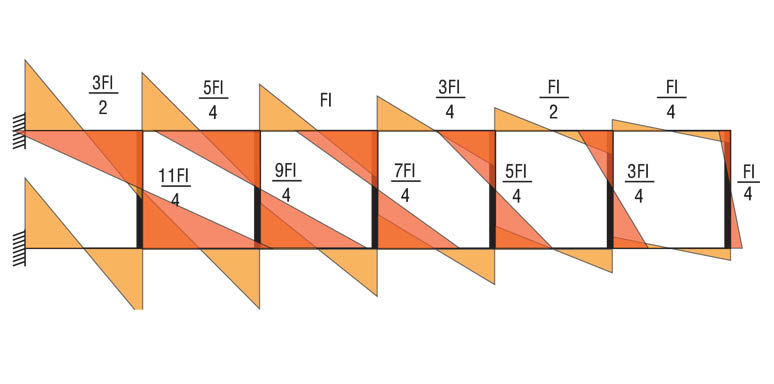
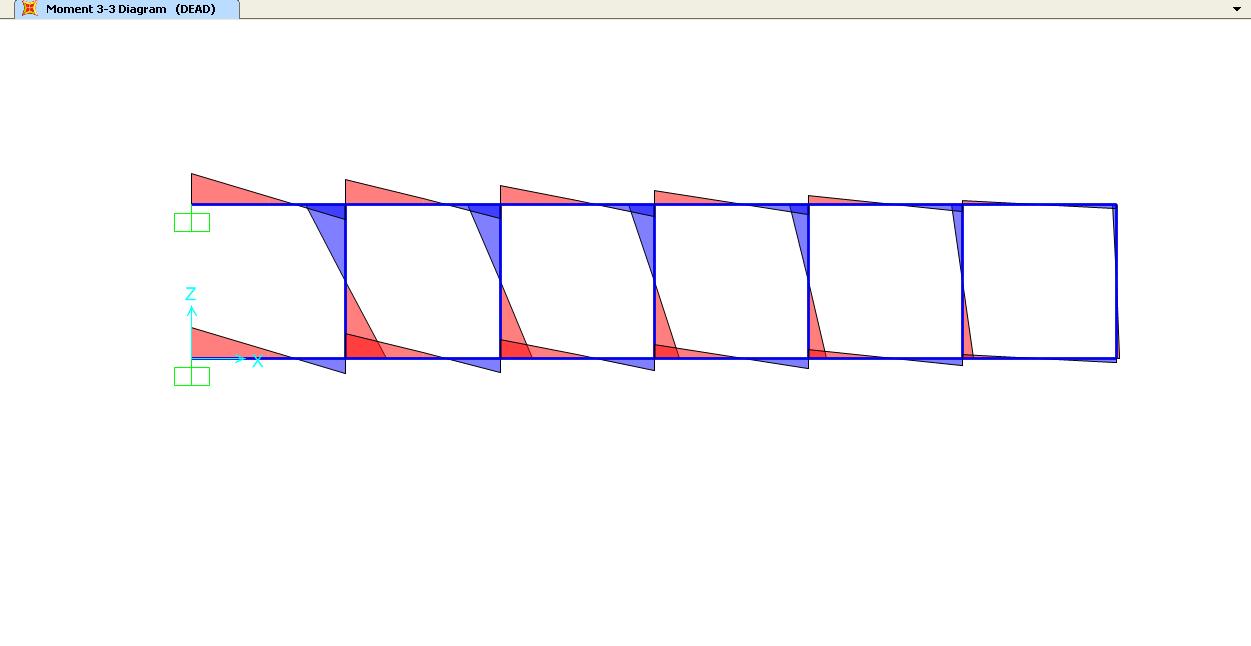
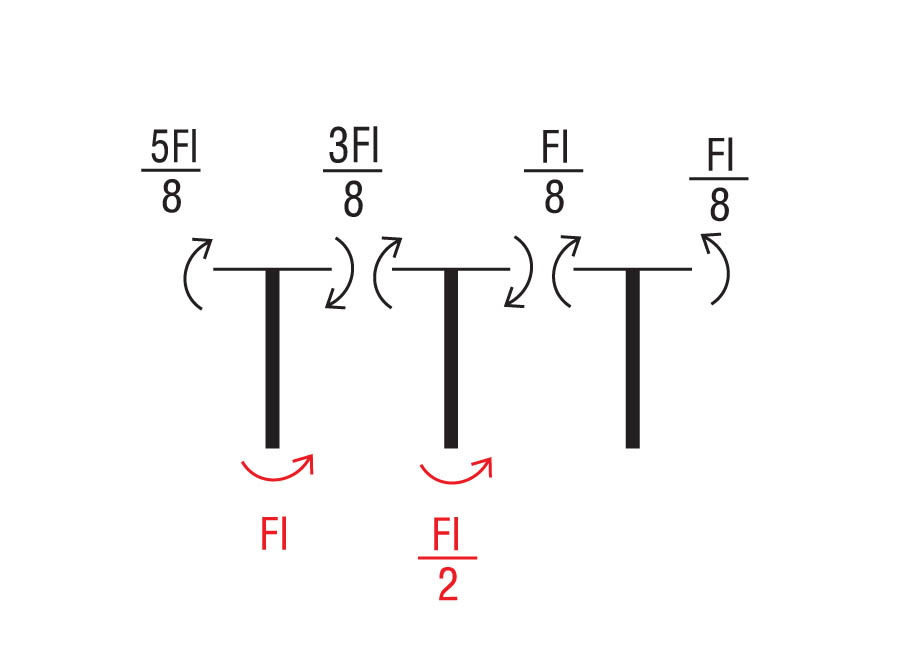
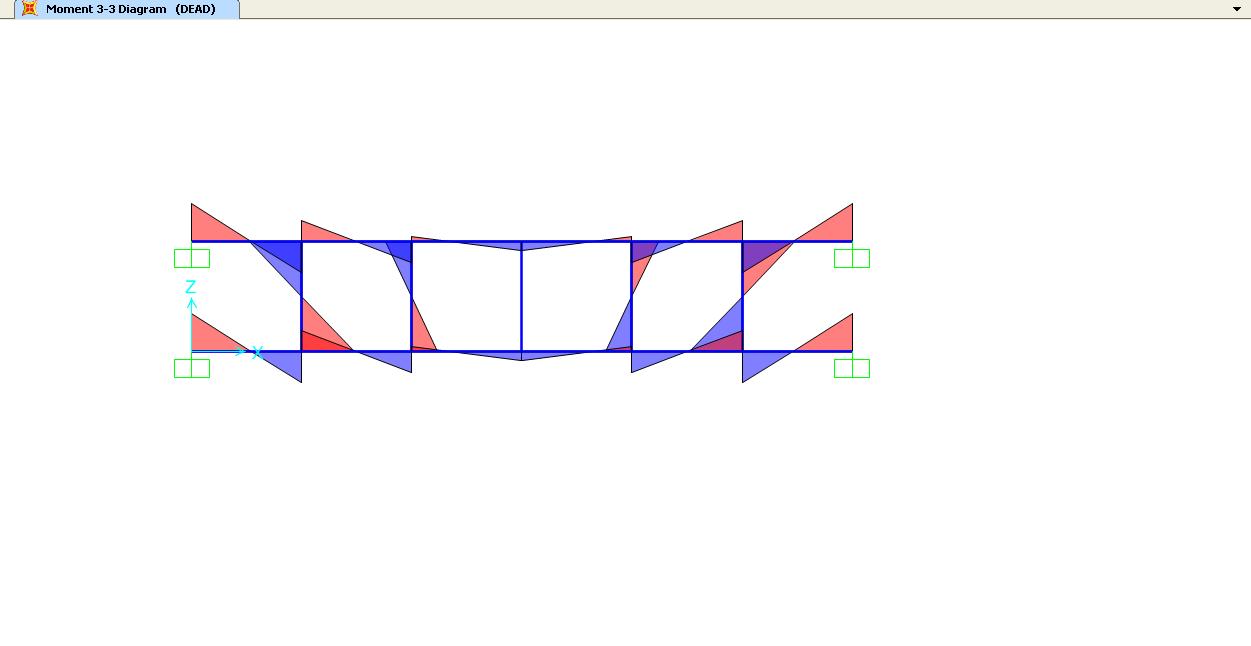
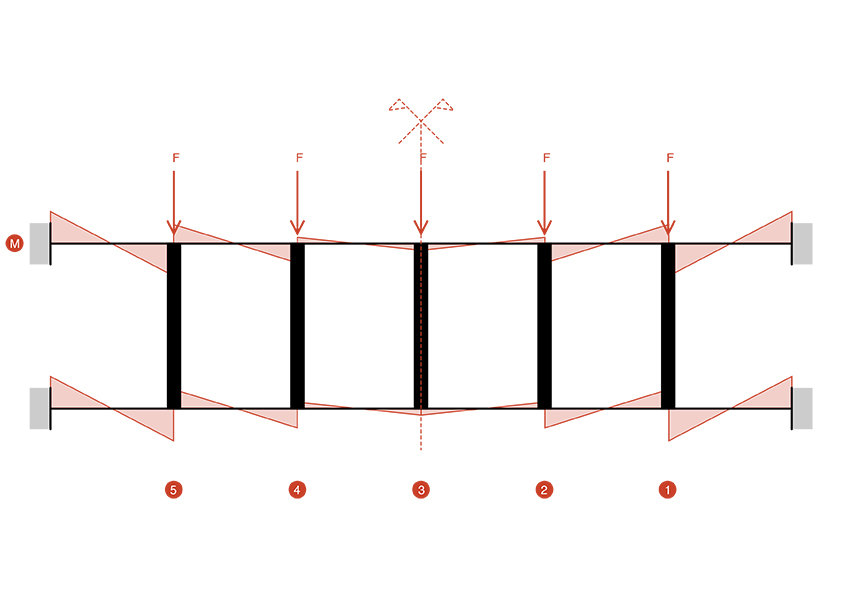
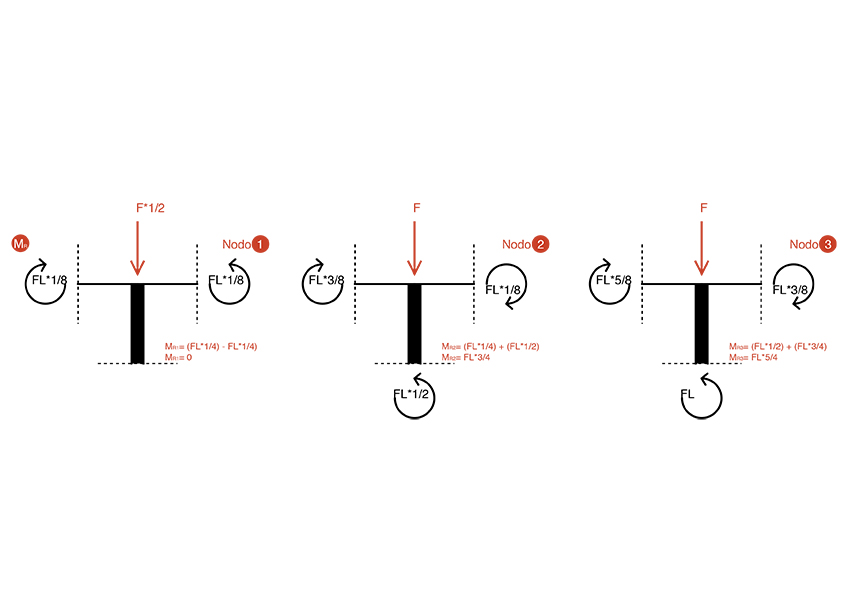
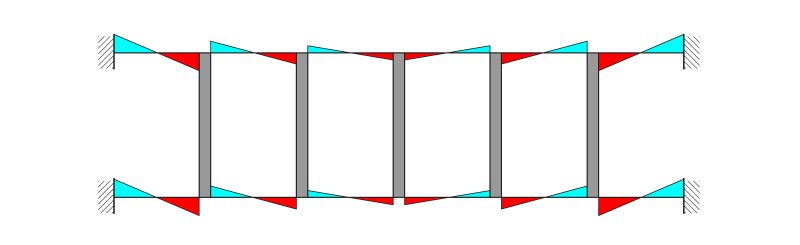
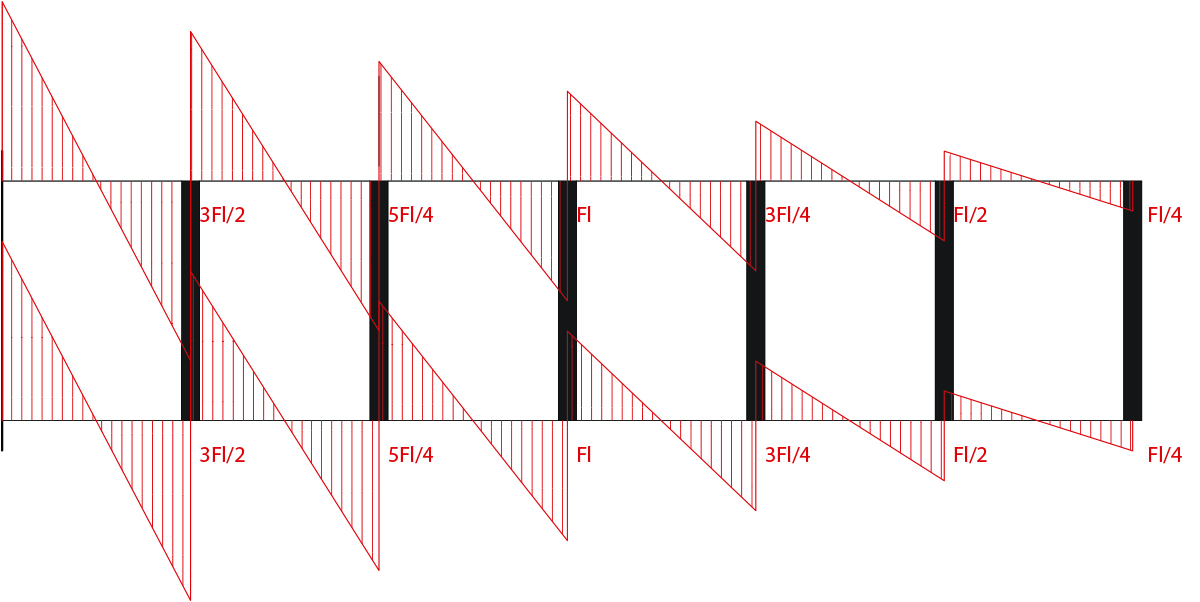
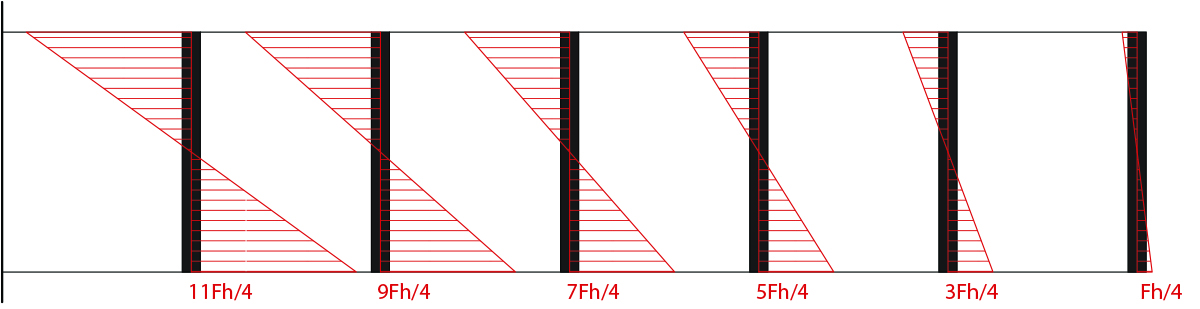
Passiamo al calcolo del momento flettente, sapendo da considerazioni precedenti che la legge del momento avrà un nullo in L*1/2 ci serve un solo altro valore noto per tracciare il diagramma del momento. Questo valore verrà identificato dal momento con polo in L*1/2.
Nodo_1
M1= ((F*1/2) * (L*1/2)) ⇒ M1= FL*1/4
Nodo_2
M2= (F * (L*1/2)) ⇒ M1= FL*1/2
Nodo_3
M3= ((F*3/2) * (L*1/2)) ⇒ M1= FL*3/4
Nodo_4
M4= ((F*2) * (L*1/2)) ⇒ M1= FL
Nodo_5
M5= ((F*5/2) * (L*1/2)) ⇒ M1= FL*5/4
Nodo_6
M6= ((F*3) * (L*1/2)) ⇒ M1= FL*3/2
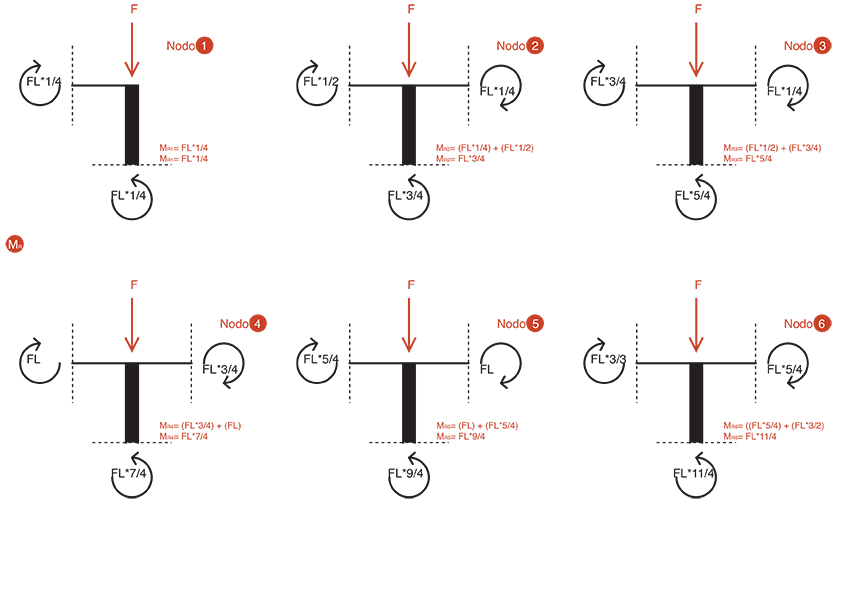
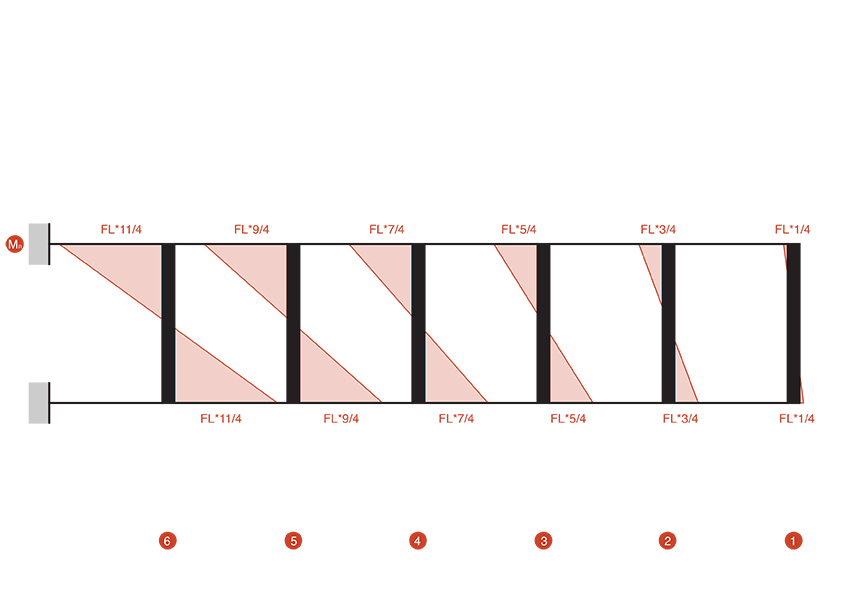
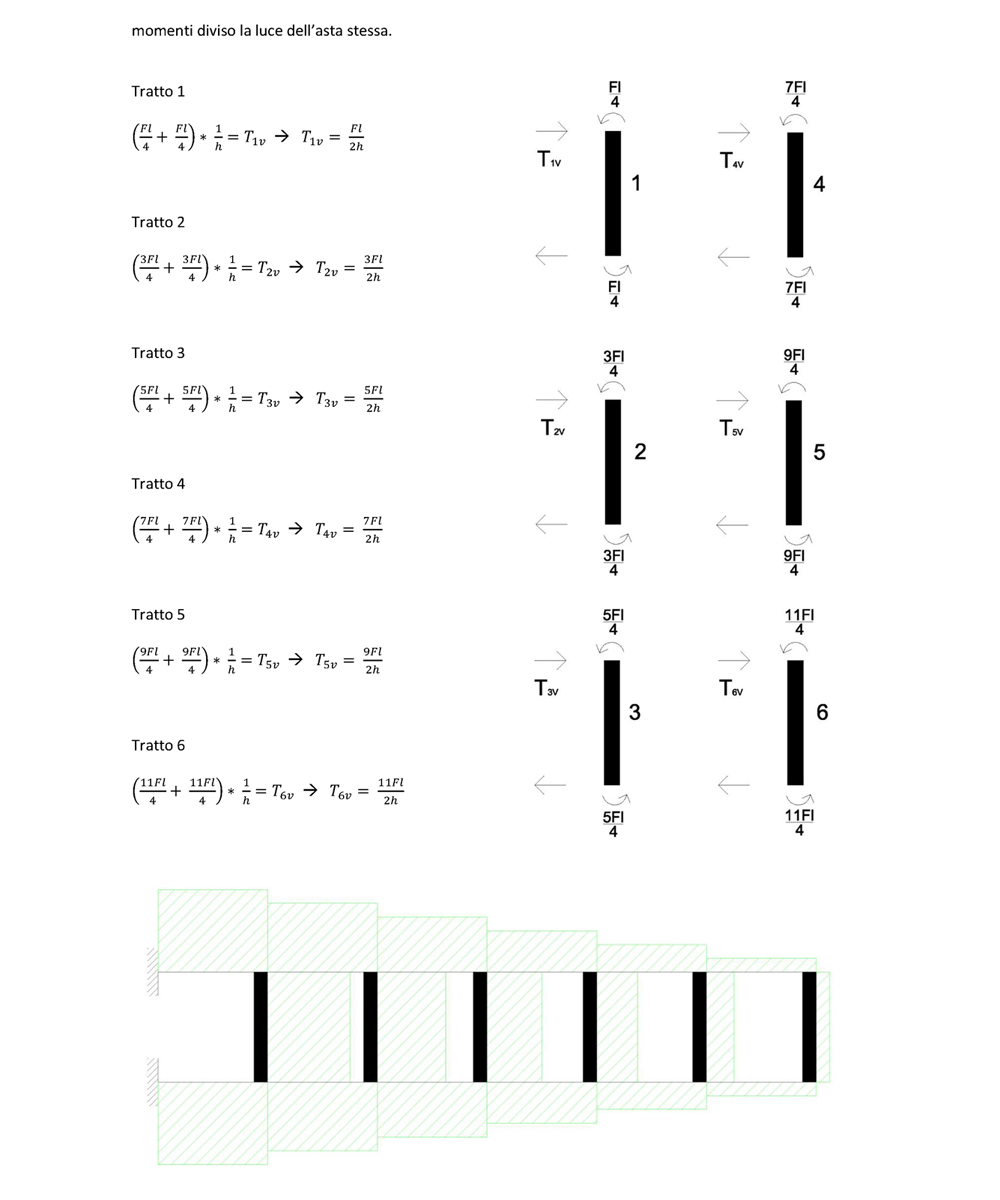
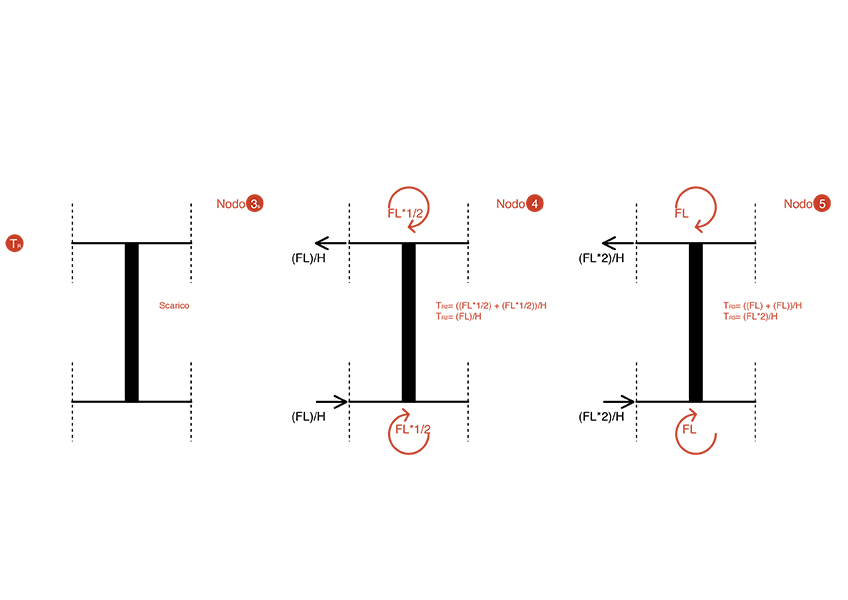
Passiamo al calcolo del momento flettente sui ritti, facendo l’equilibrio dei momenti del nodo.
Nodo_1
MR1= FL*1/4 ⇒ MR1= FL*1/4
Nodo_2
MR2= (FL*1/4) + (FL*1/2) ⇒ MR2= FL*3/4
Nodo_3
MR3= (FL*1/2) + (FL*3/4) ⇒ MR3= FL*5/4
Nodo_4
MR4= (FL*3/4) + (FL) ⇒ MR4= FL*7/4
Nodo_5
MR5= (FL) + (FL*5/4) ⇒ MR5= FL*9/4
Nodo_6
MR6= ((FL*5/4) + (FL*3/2) ⇒ MR6= FL*11/4
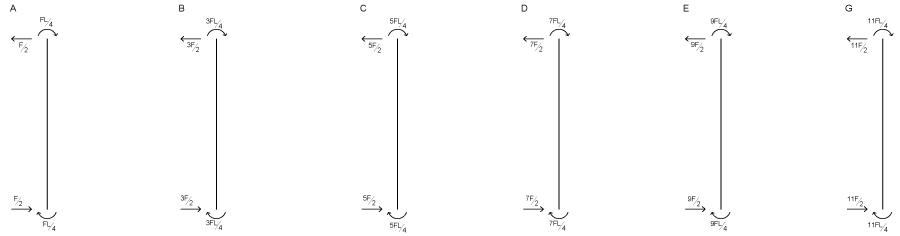
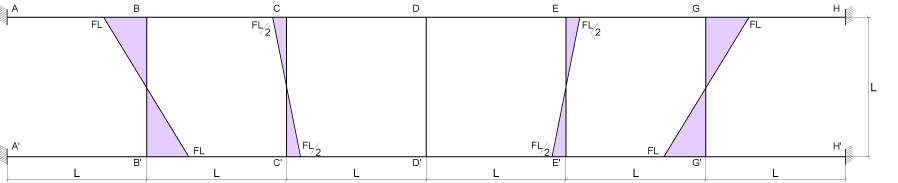
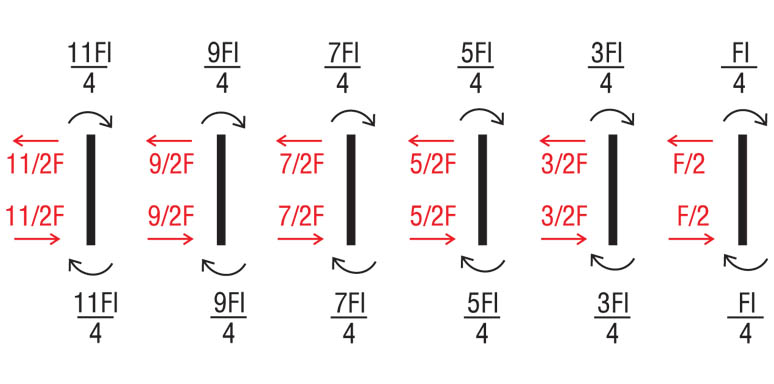
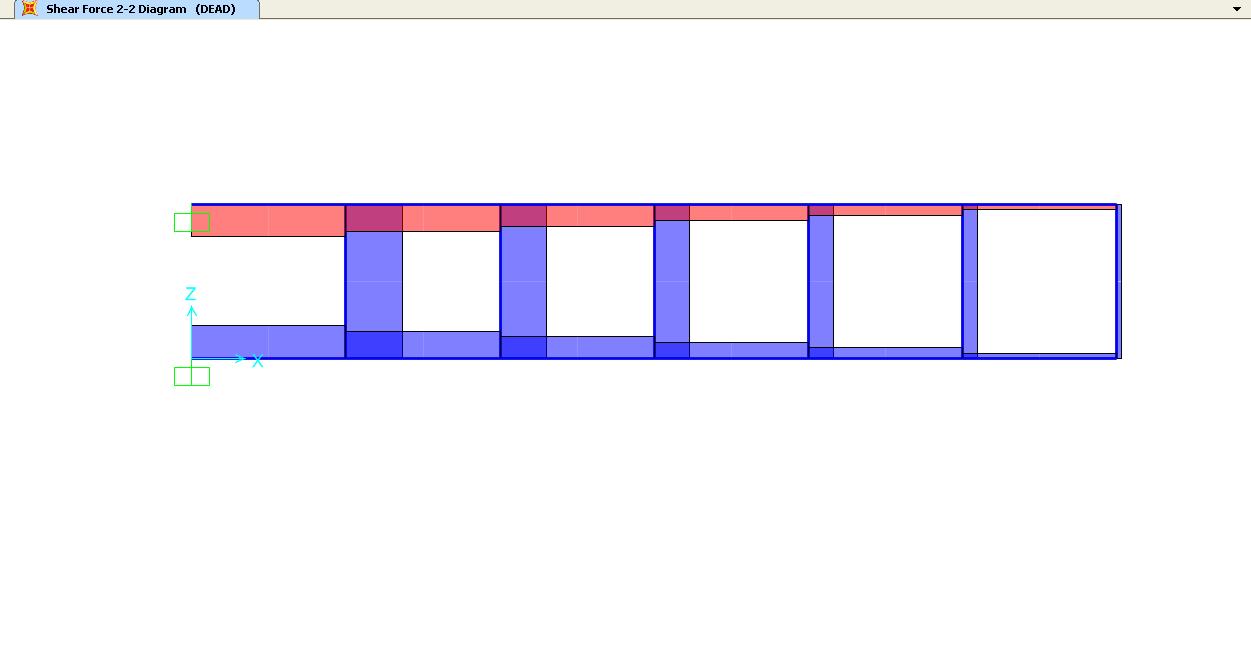
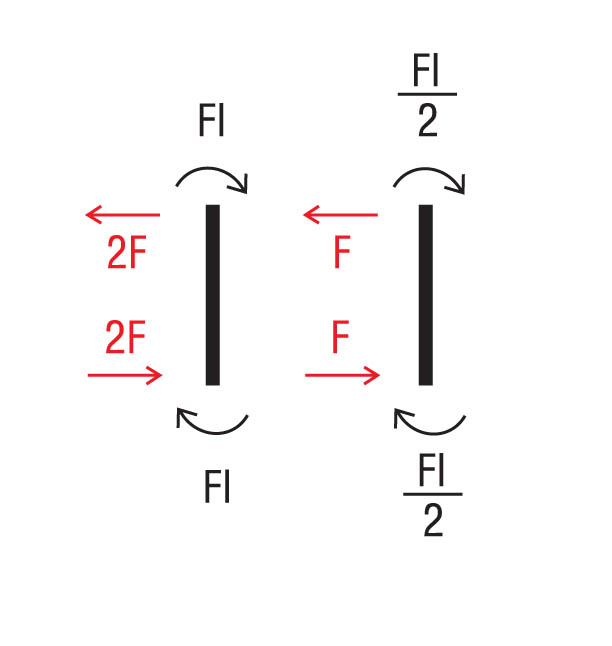
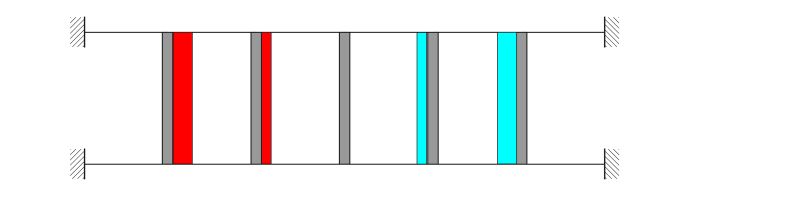
Passiamo al calcolo del taglio sui ritti, avendo i momenti flettenti agli estremi del ritto concordi li possiamo sommare e dividere il risultato per la luce del ritto, definendo così il valore del taglio.
Nodo_1
TR1= ((FL*1/4) + (FL*1/4))/H ⇒ TR1= (FL*1/2)/H
Nodo_2
TR2= ((FL*3/4) + (FL*3/4))/H ⇒ TR2= (FL*3/2)/H
Nodo_3
TR3= ((FL*5/4) + (FL*5/4))/H ⇒ TR3= (FL*5/2)/H
Nodo_4
TR4= ((FL*7/4) + (FL*7/4))/H ⇒ TR4= (FL*7/2)/H
Nodo_5
TR5= ((FL*9/4) + (FL*9/4))/H ⇒ TR5= (FL*9/2)/H
Nodo_6
TR6= ((FL*11/4) + (FL*11/4))/H ⇒ TR6= (FL*11/2)/H
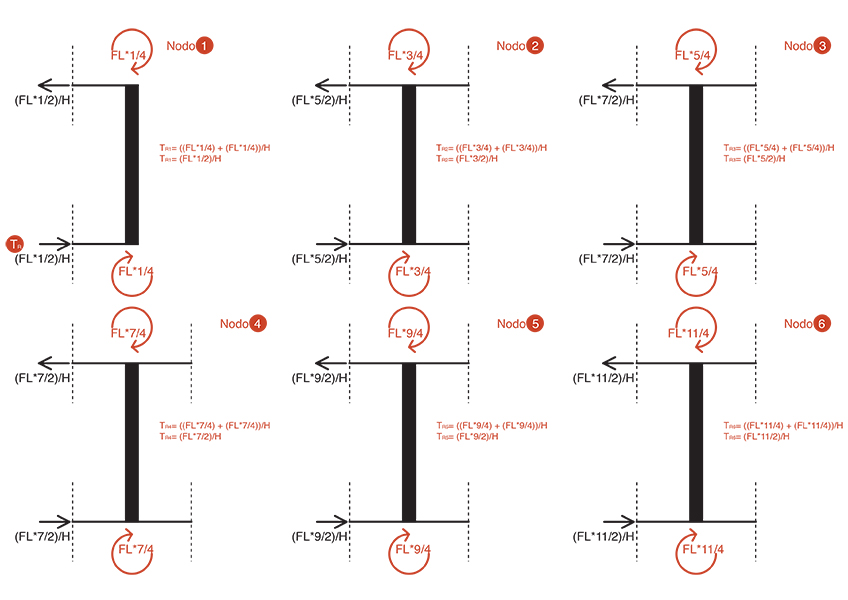
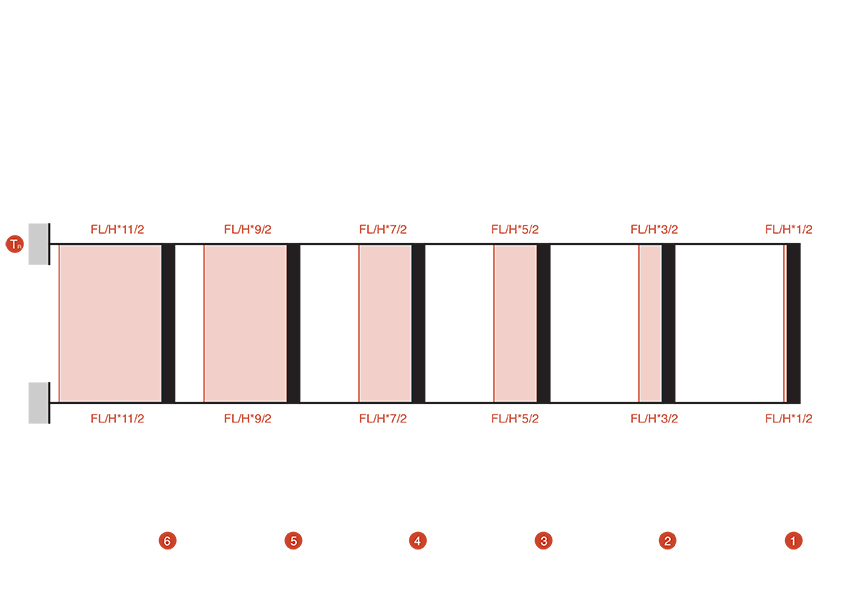
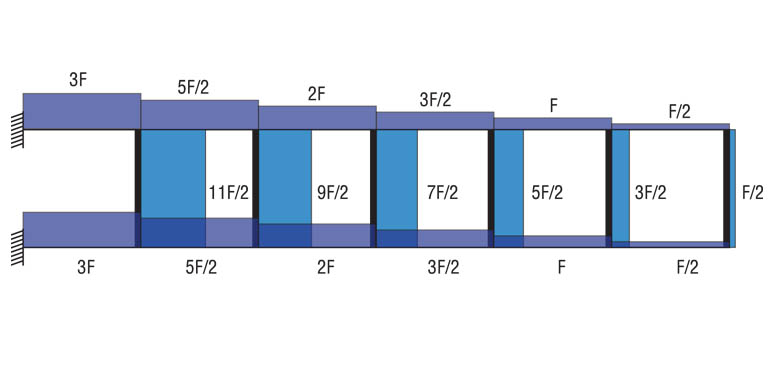
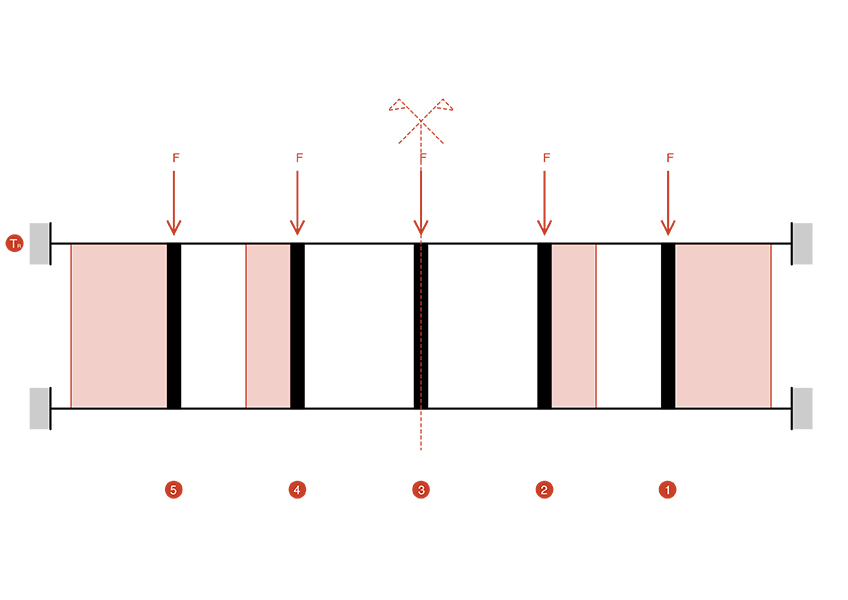
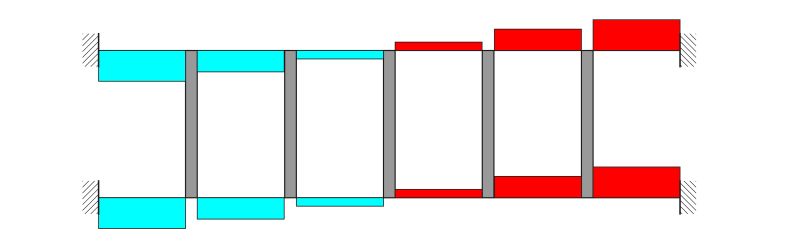
Passiamo al calcolo della normale sui traversi, sapendo che essendo tratti ortogonali ai ritti, lo sforzo di taglio di quest’ultimi si trasmette come sforzo normale nei traversi.
Nodo_1
⇒ NR1= (FL*1/2)/H
Nodo_2
⇒ NR2= (FL*3/2)/H
Nodo_3
⇒ NR3= (FL*5/2)/H
Nodo_4
⇒ NR4= (FL*7/2)/H
Nodo_5
⇒ NR5= (FL*9/2)/H
Nodo_6
⇒ NR6= (FL*11/2)/H

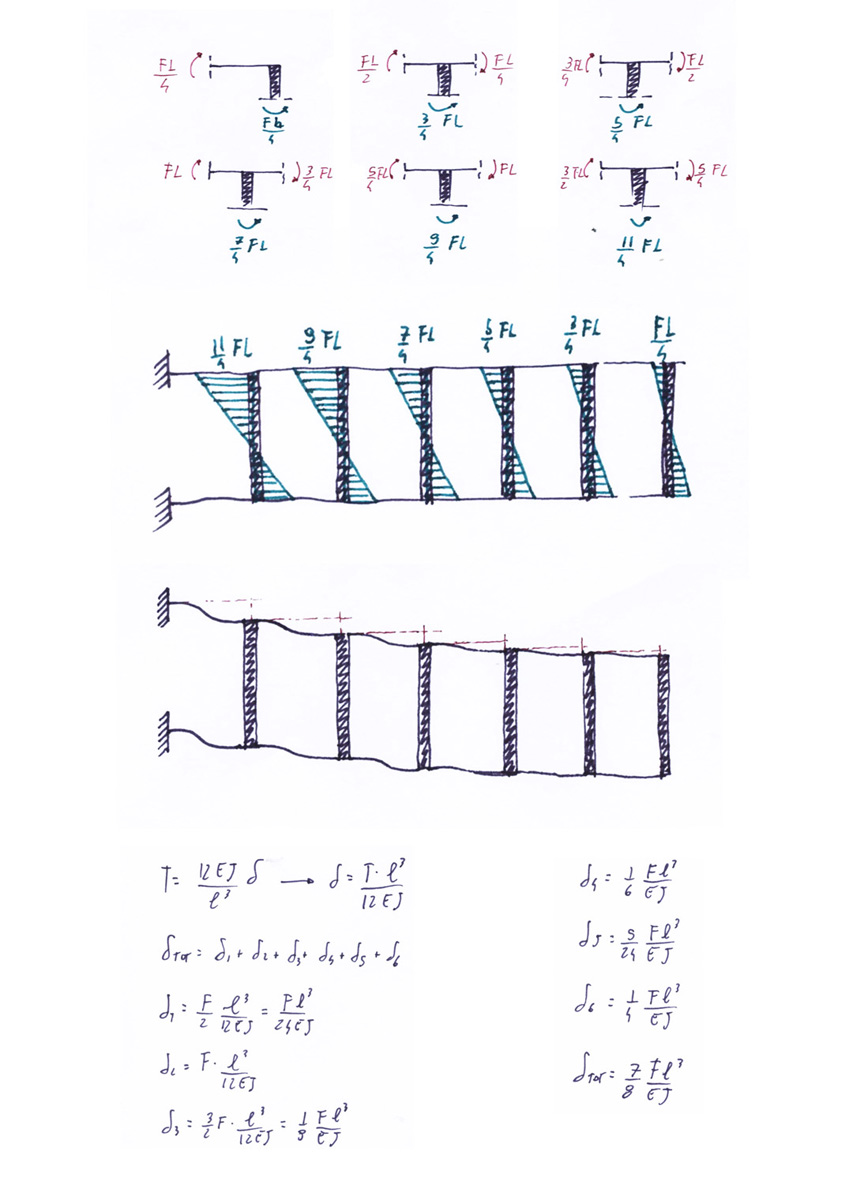
Passiamo al calcolo dello spostamento della trave Vierendeel, avendo definito che tutti i ritti della struttura hanno una rigidezza pari a 12*E*J/L³. Per definire lo spostamento utilizzeremo l’equilibrio alla traslazione orizzontale della trave.
Nodo_1
F/2 = T = ((12*E*J)/L³)*δ1 ⇒ δ1= (F*L³) / (1/24*E*J)
Nodo_2
F = T = ((12*E*J)/L³)*δ2 ⇒ δ2= (F*L³) / (1/12*E*J)
Nodo_3
F*3/2 = T = ((12*E*J)/L³)*δ3 ⇒ δ3= (F*L³) / (1/8*E*J)
Nodo_4
F*2 = T = ((12*E*J)/L³)*δ4 ⇒ δ4= (F*L³) / (1/6*E*J)
Nodo_5
F*5/2 = T = ((12*E*J)/L³)*δ5 ⇒ δ5= (F*L³) / (1/24*E*J)
Nodo_6
F*3 = T = ((12*E*J)/L³)*δ6 ⇒ δ6= (F*L³) / (1/4*(E*J)
_(LM_PA)/2013/vierendeel 1.jpg)
_(LM_PA)/2013/vierendeel 2.jpg)









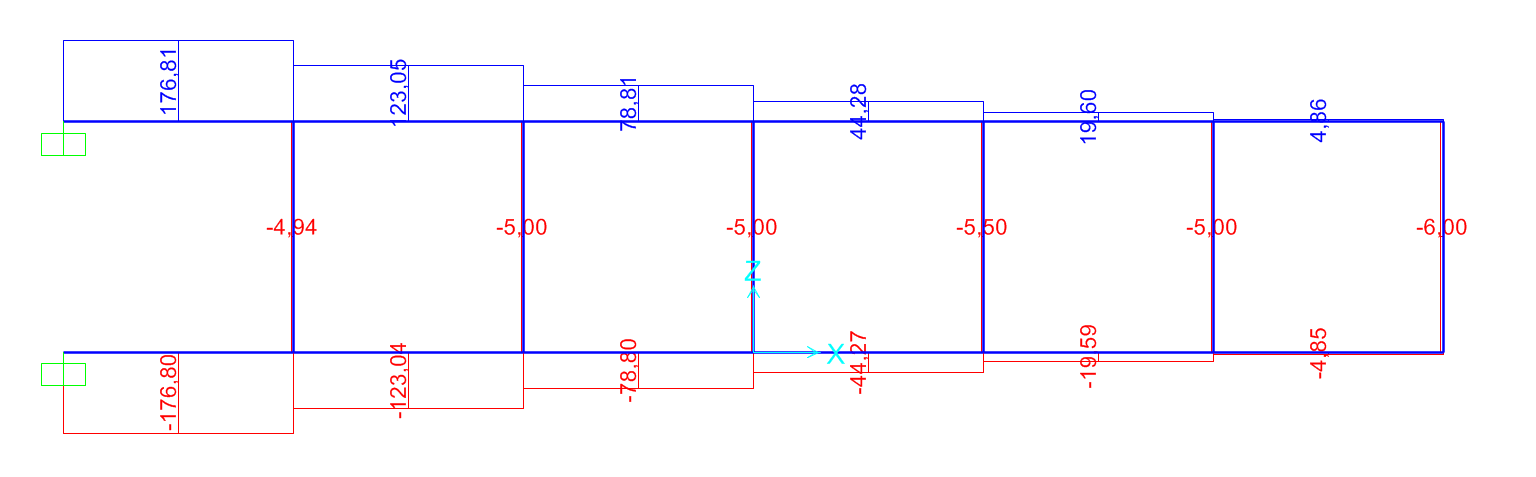






 SFORZO ASSIALE
SFORZO ASSIALE

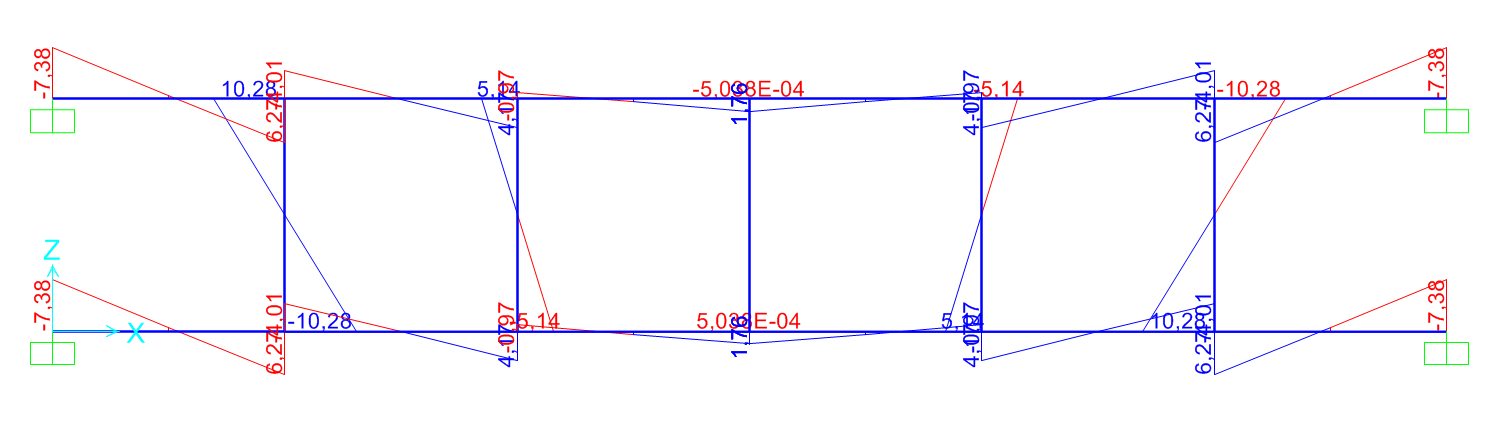
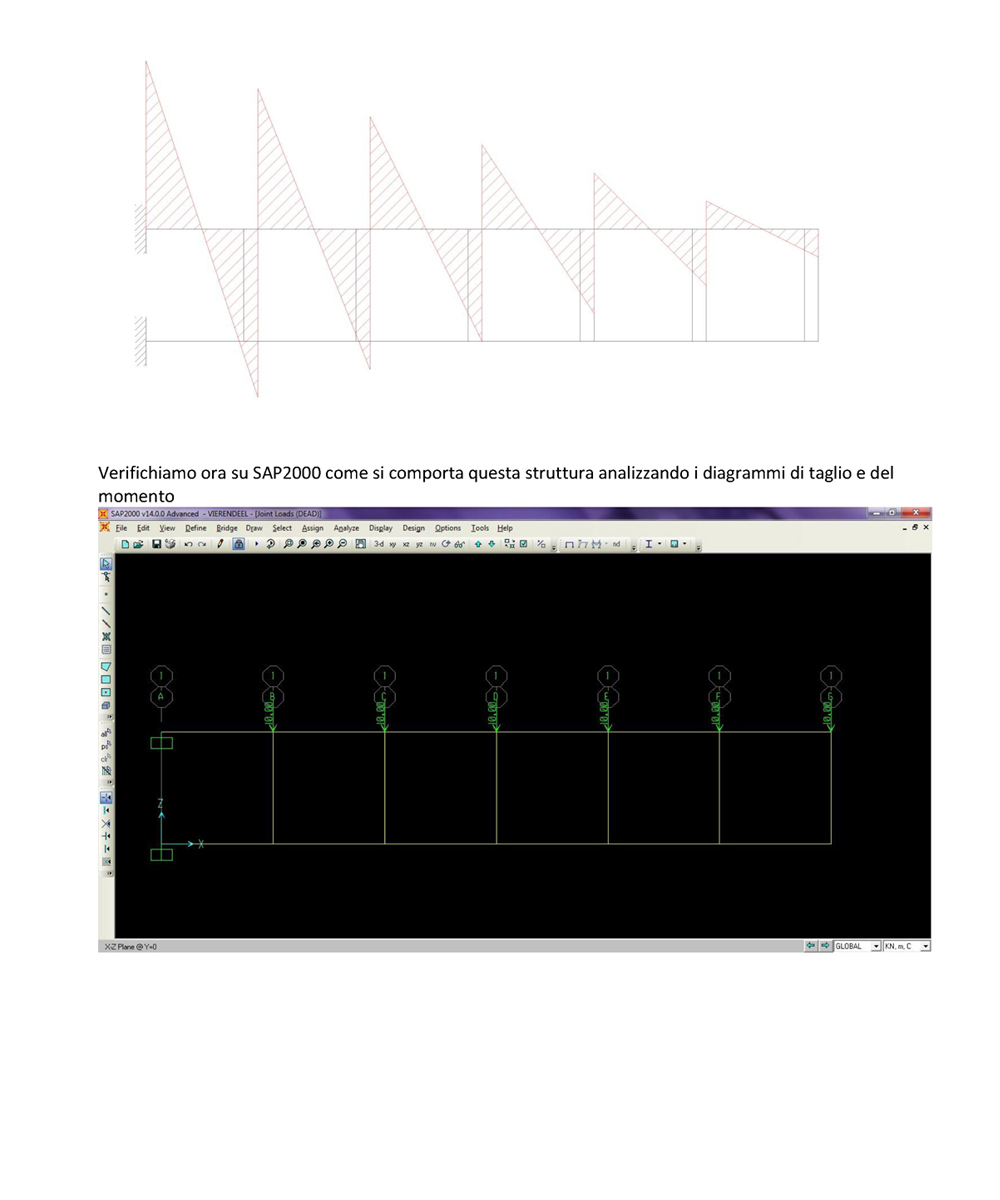
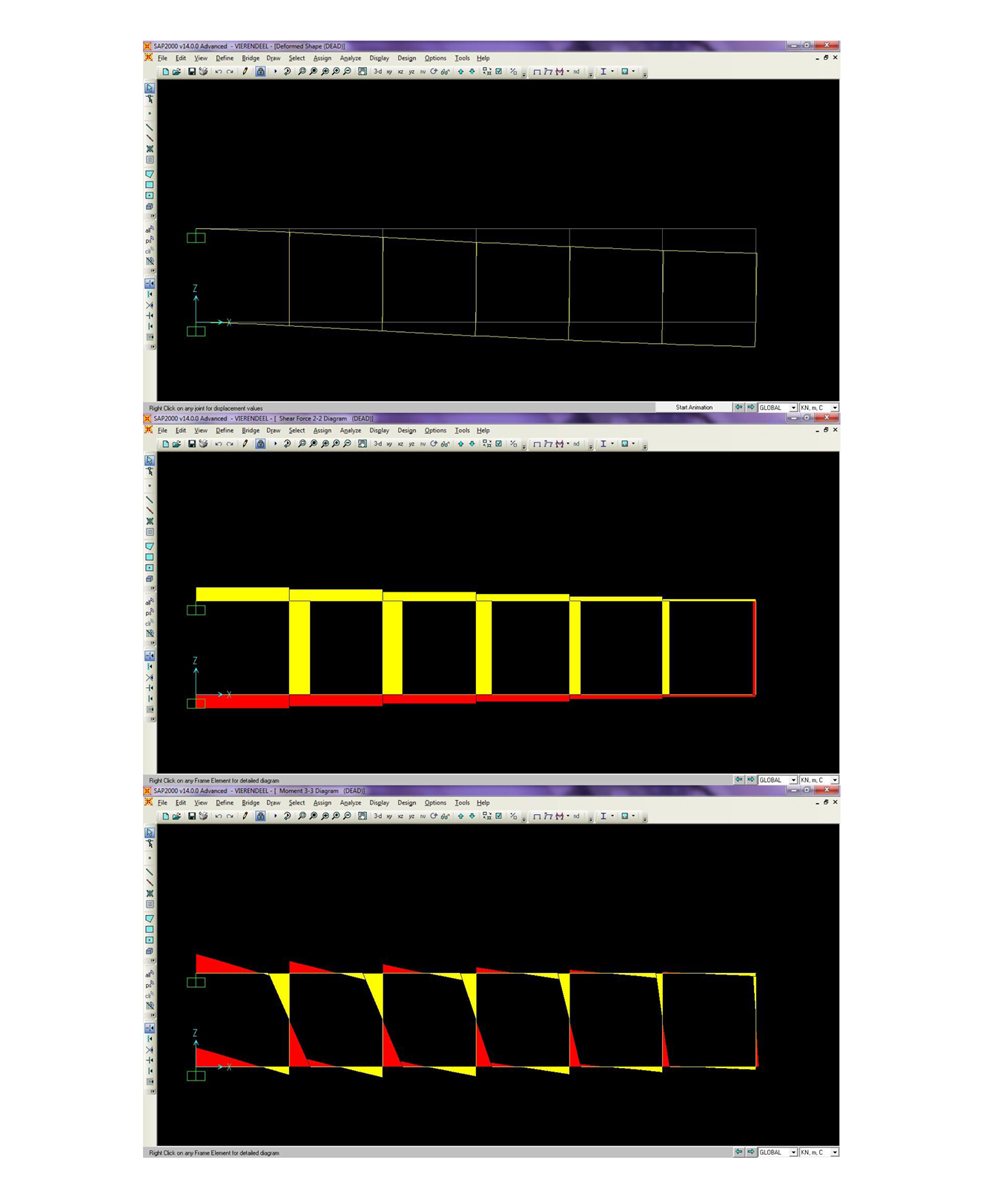
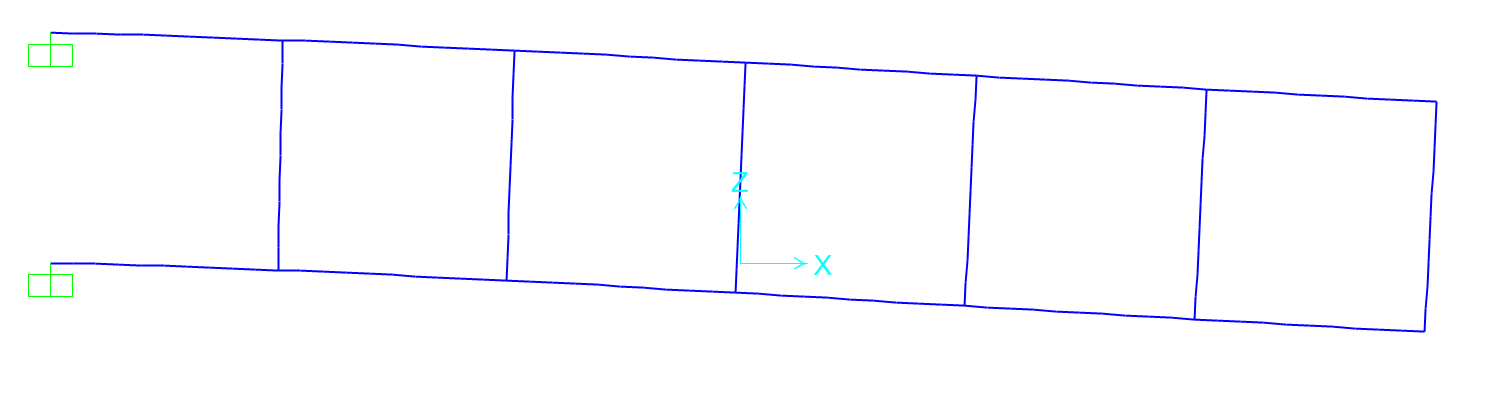
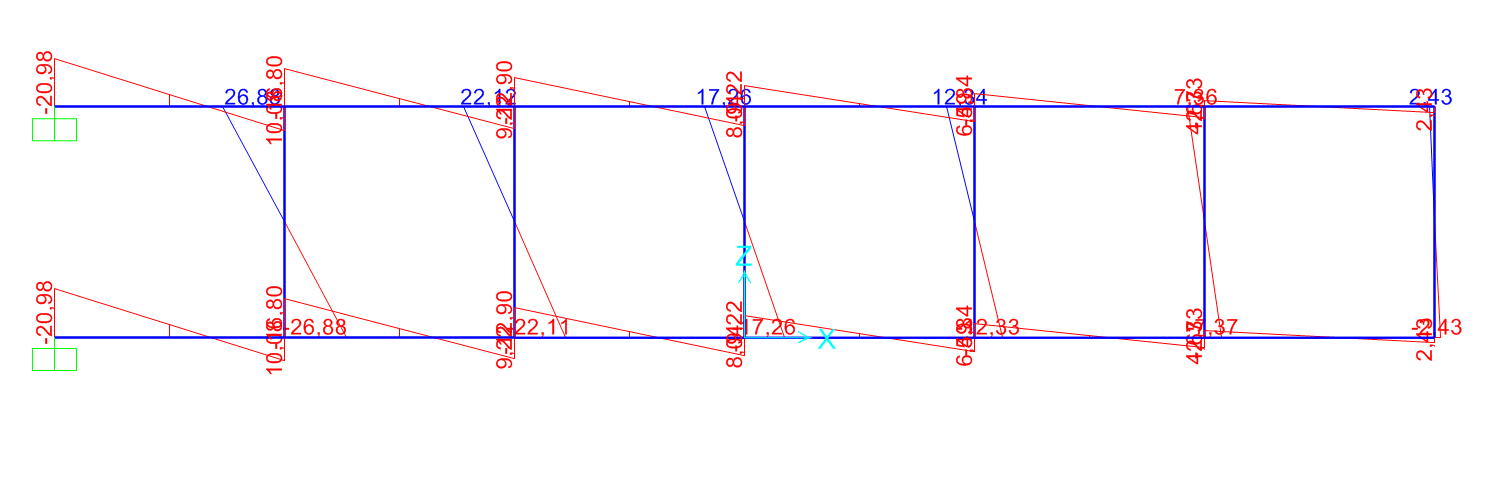
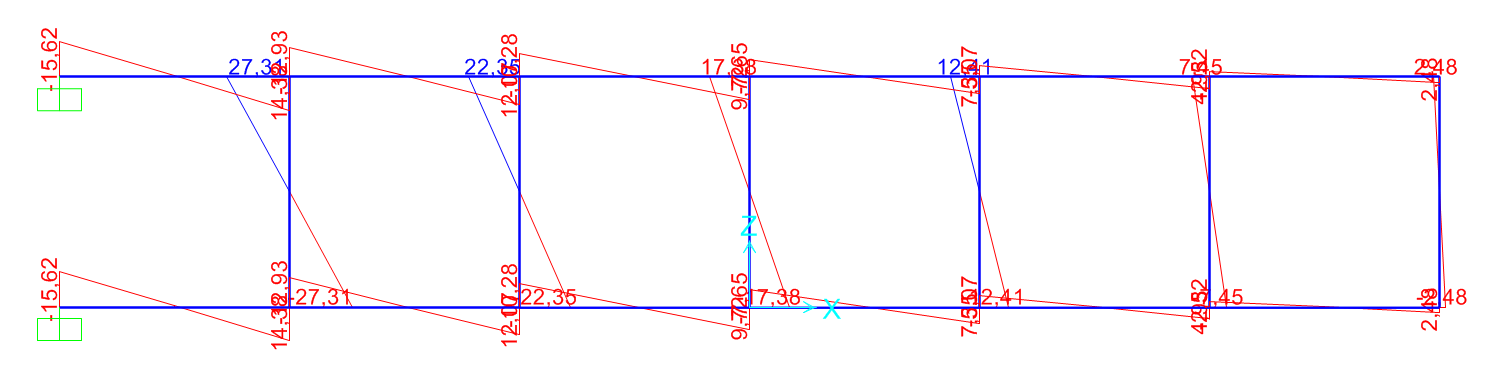
 Confronto i risultati con SAP:
Confronto i risultati con SAP: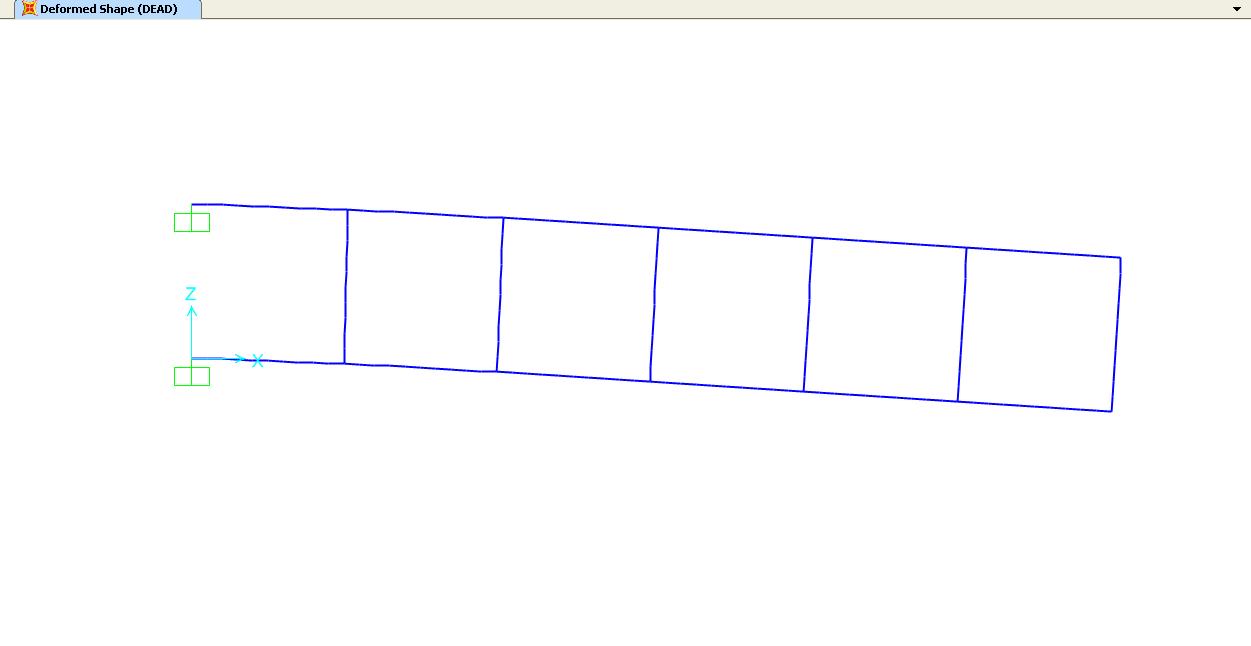
 TRAVE VIERENDEEL DOPPIAMENTE APPOGGIATA
TRAVE VIERENDEEL DOPPIAMENTE APPOGGIATA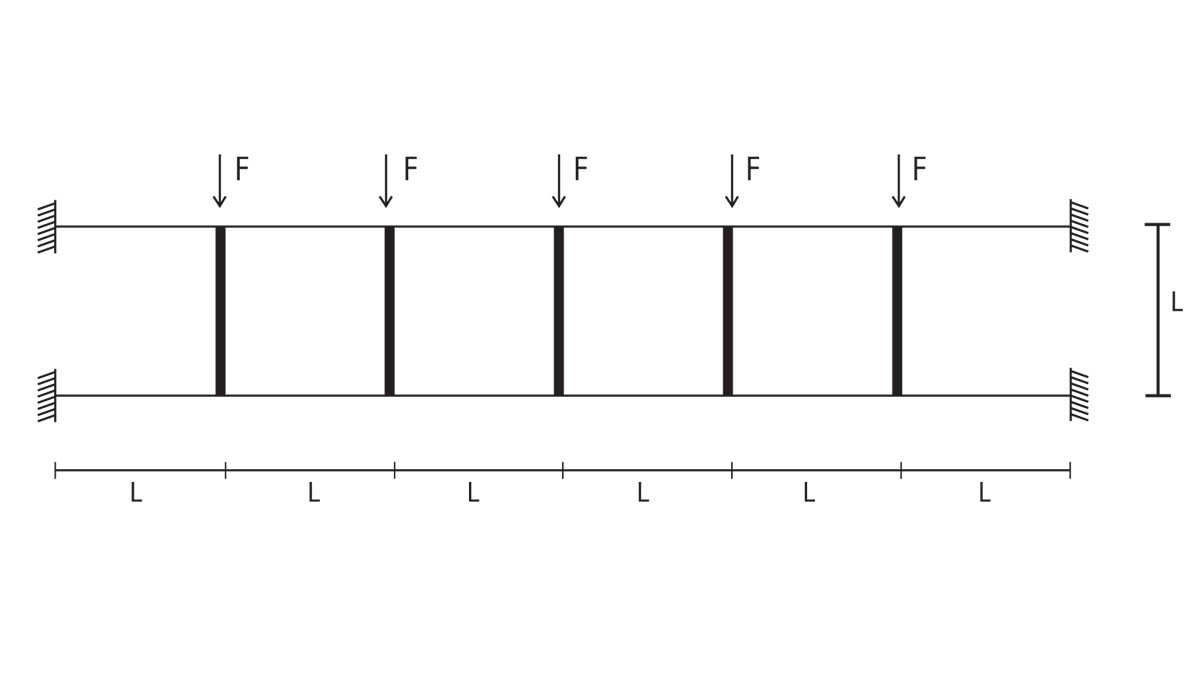








Commenti recenti