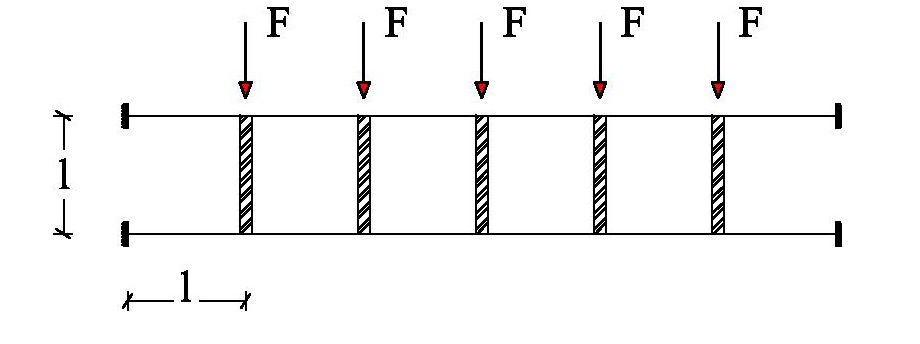
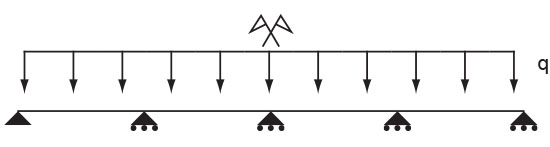
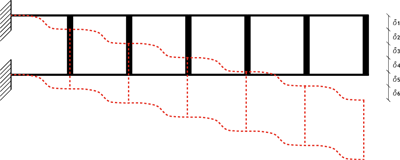
In questo blog si continua a trattare il problema iperstatico, stavolta risolto col metodo delle rigidezze. In particolare viene calcolata una trave vierendeel in cui i pilastri sono infinitamente rigidi e i traversi deformabili.
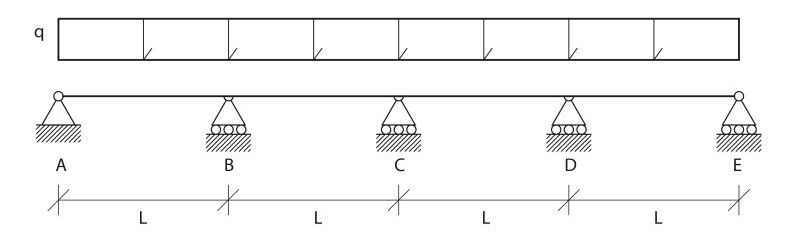
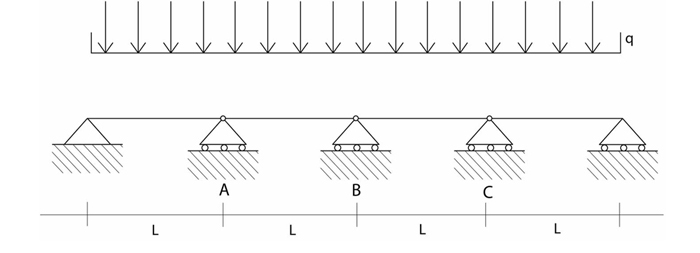
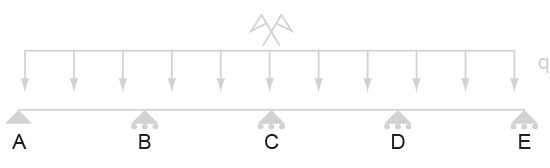
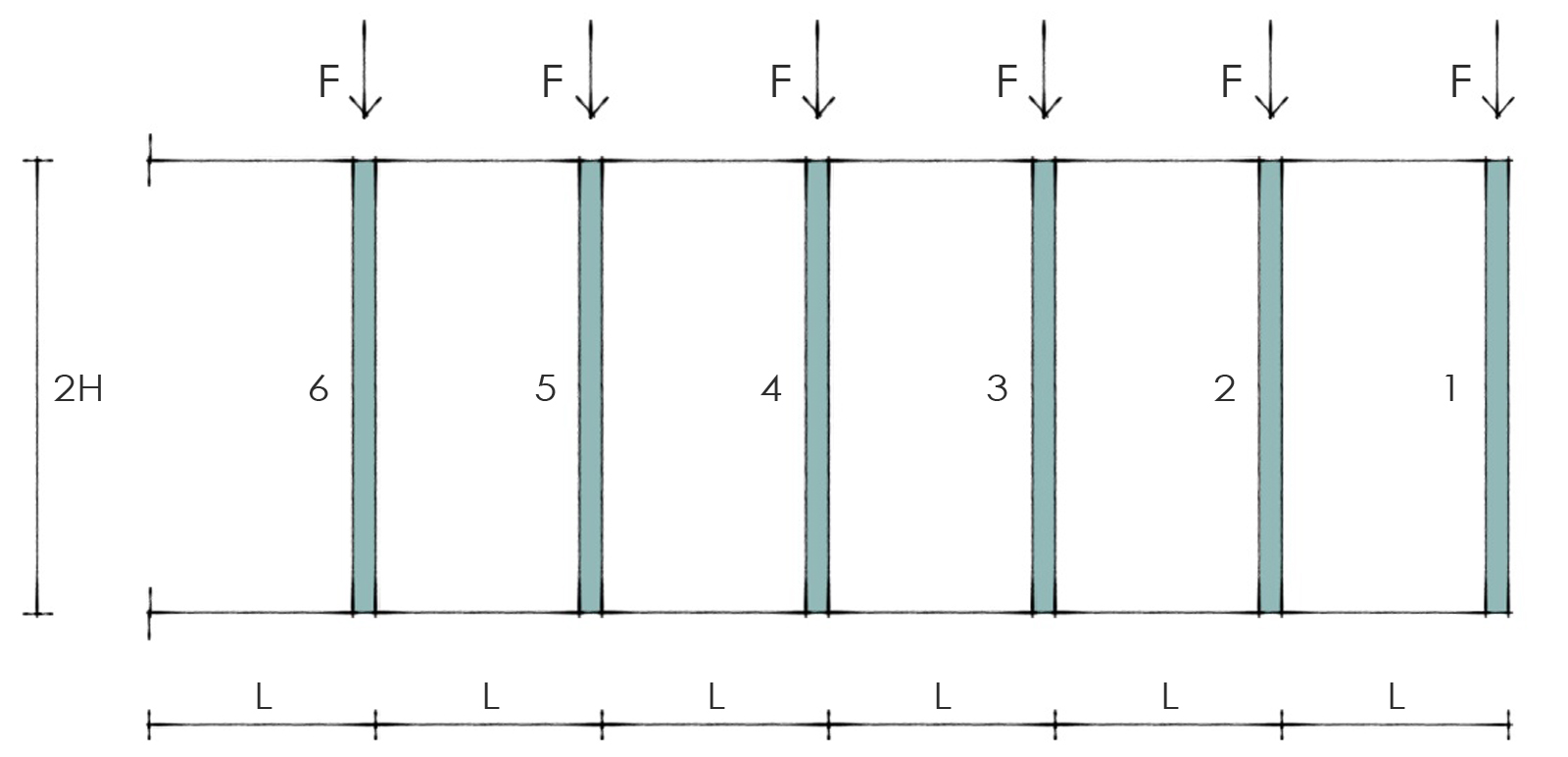
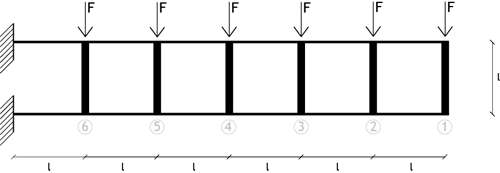
SCHEMA DI CALCOLO
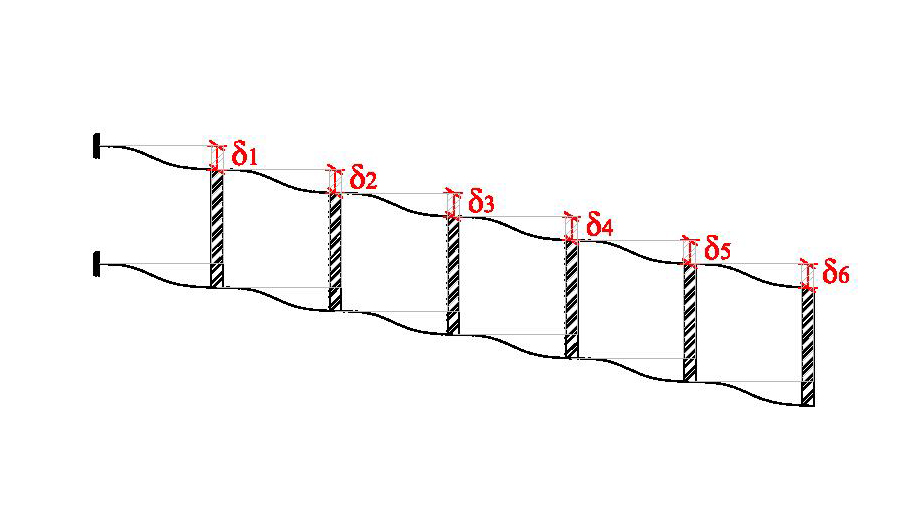
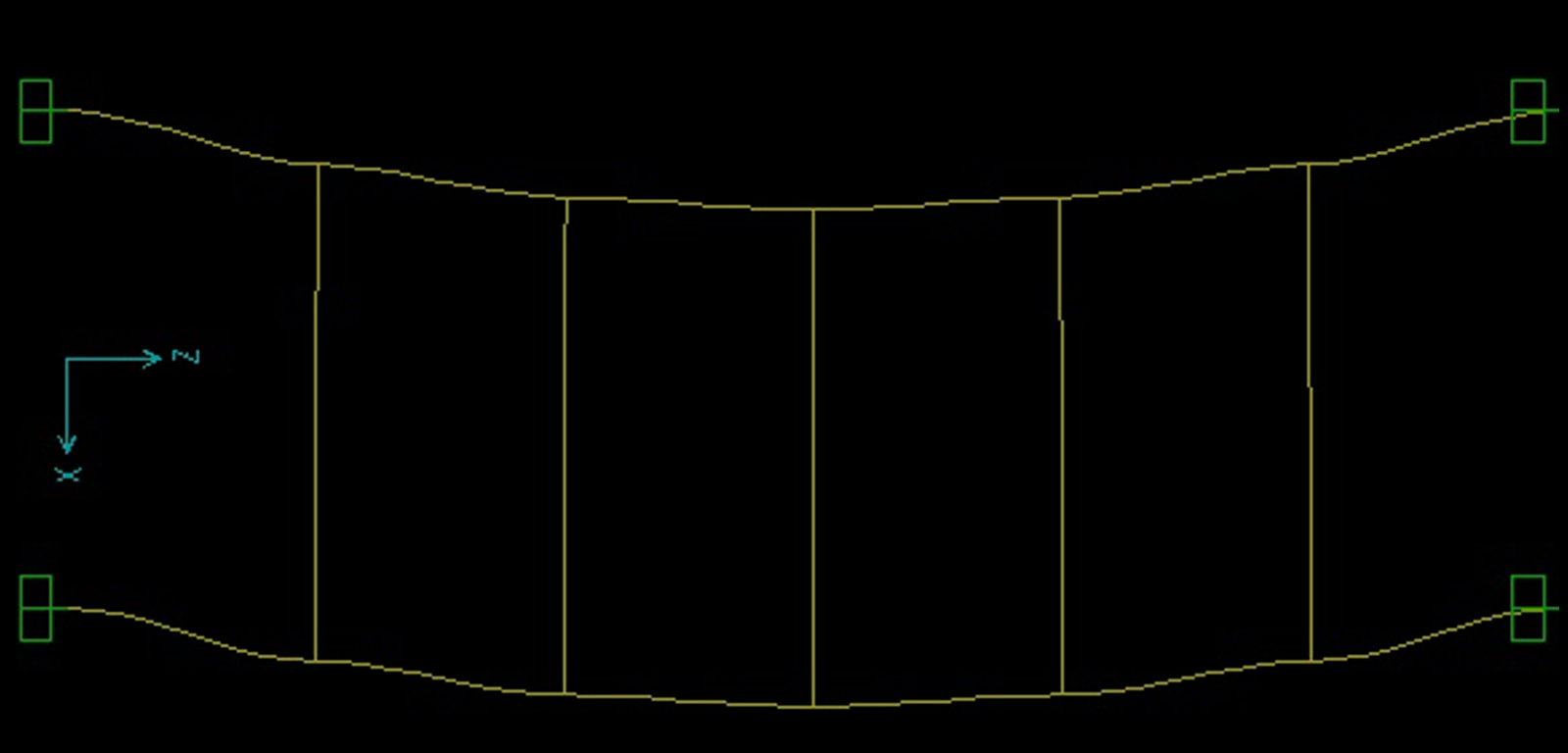
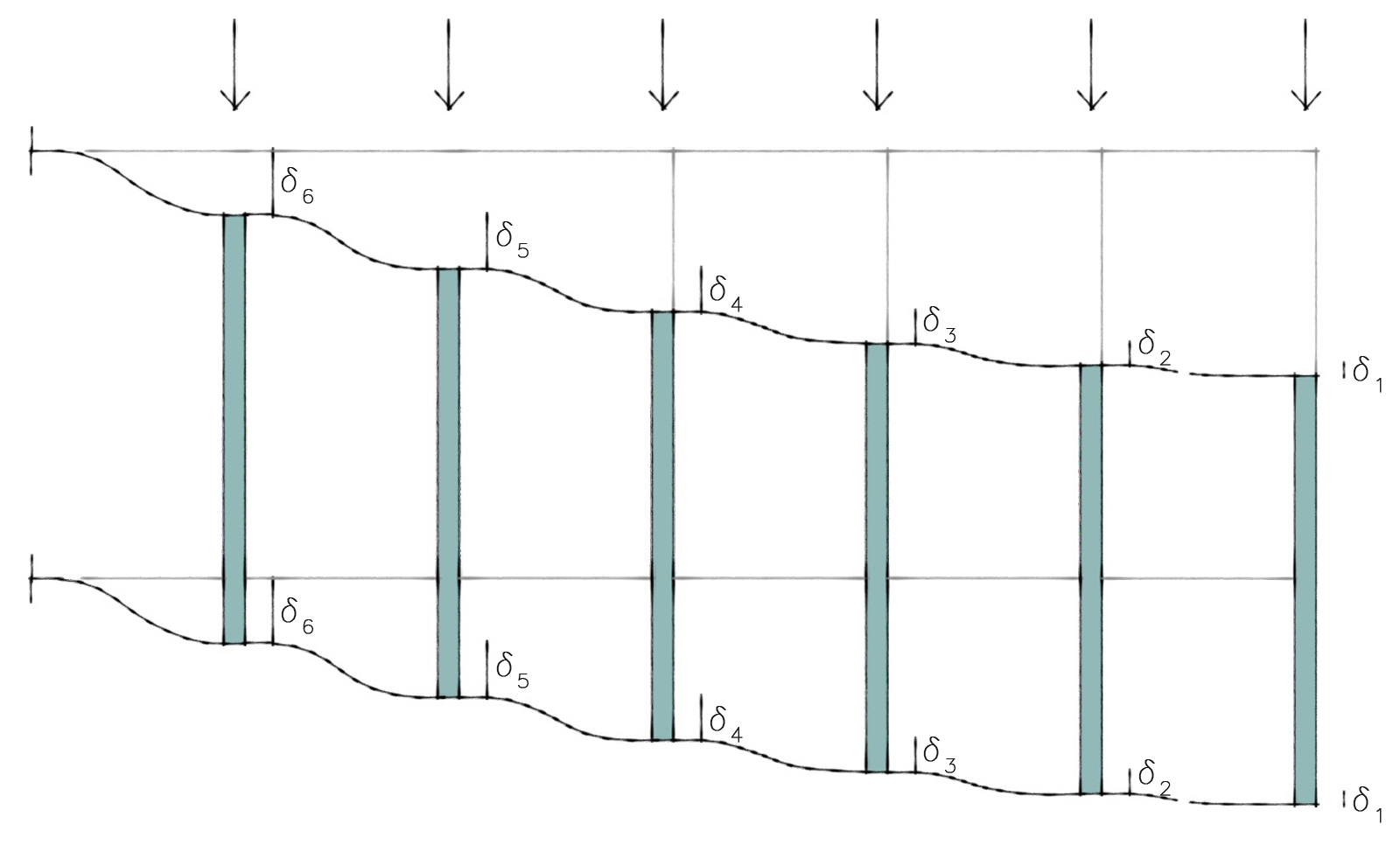
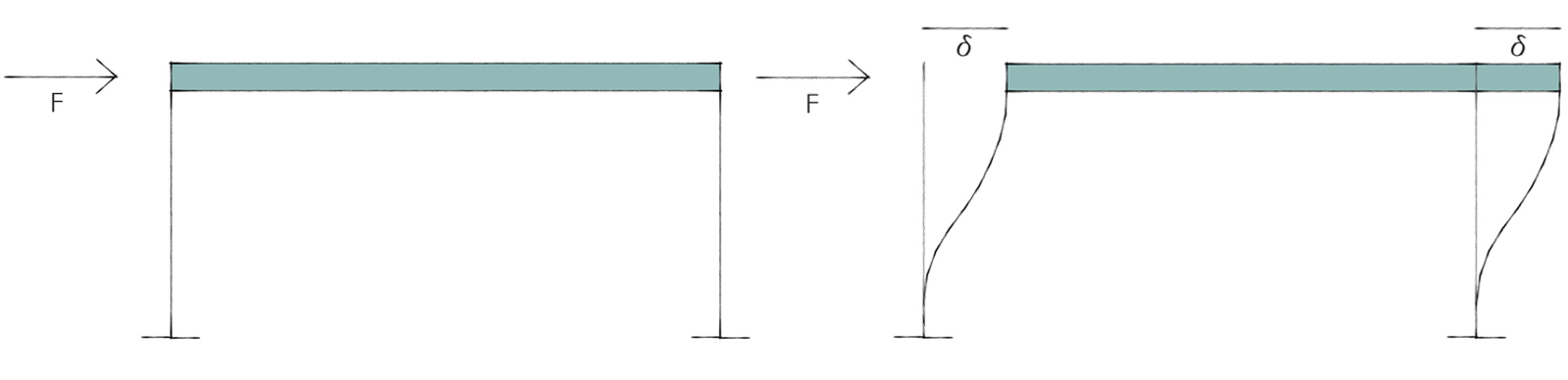
Per effetto delle forze esterne, i pilastri traslano, senza deformarsi, di una quantità δ.
DEFORMATA
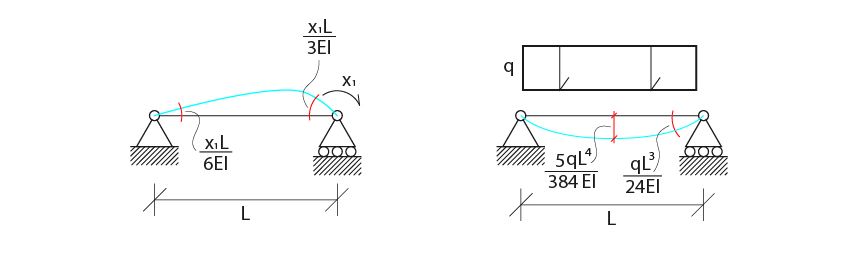
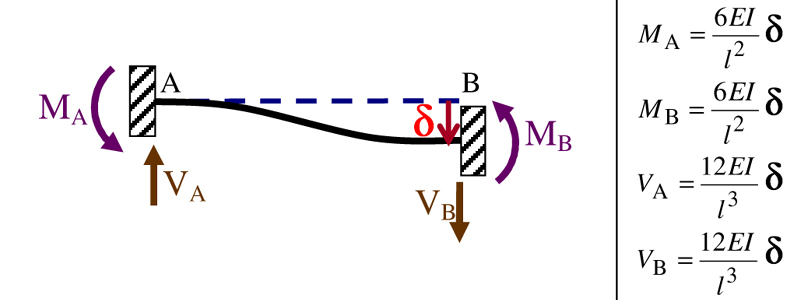
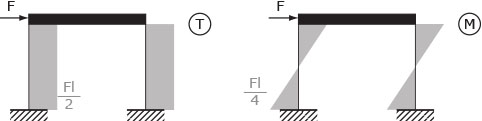
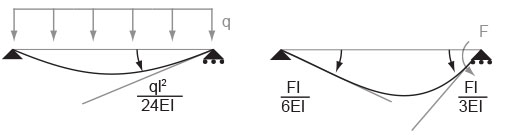
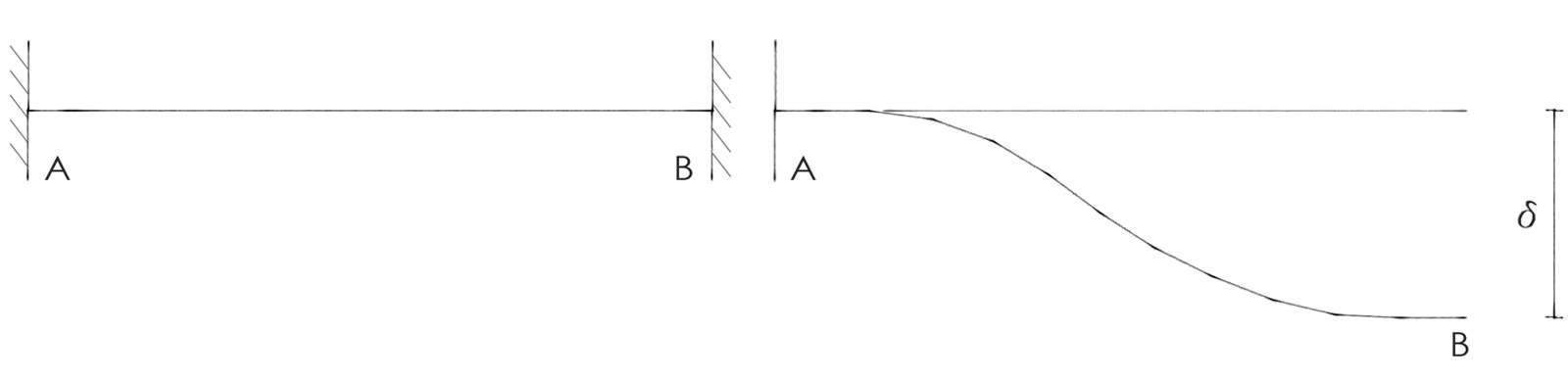
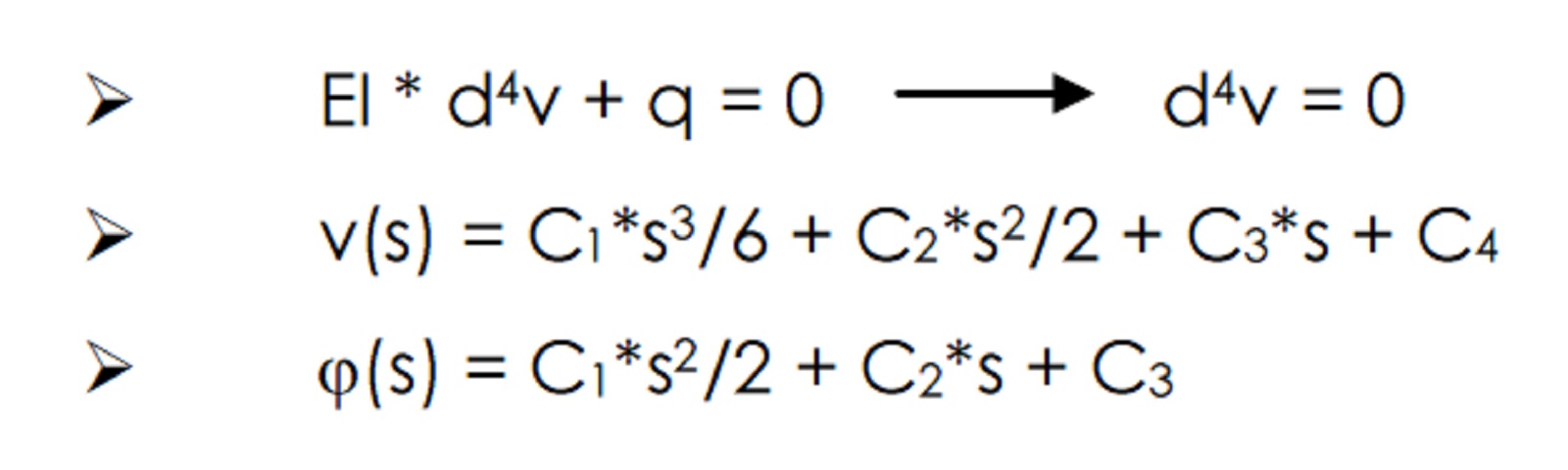
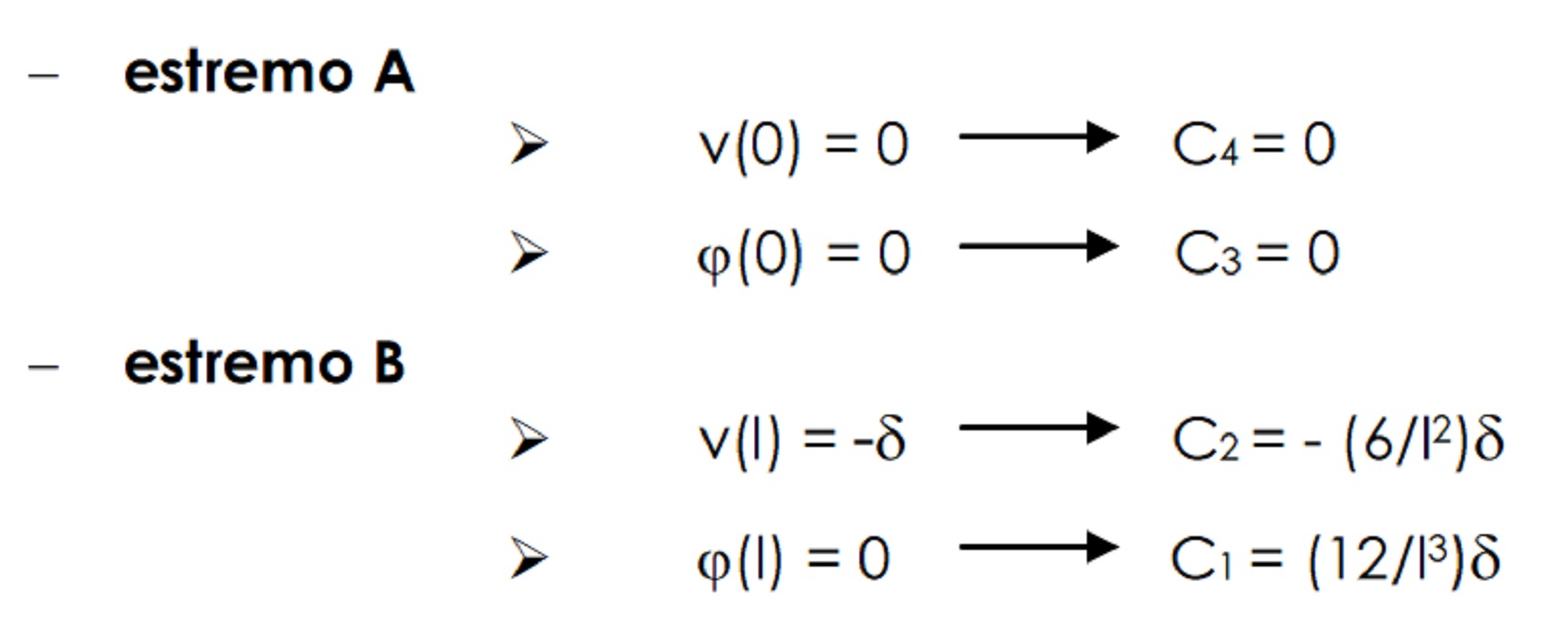
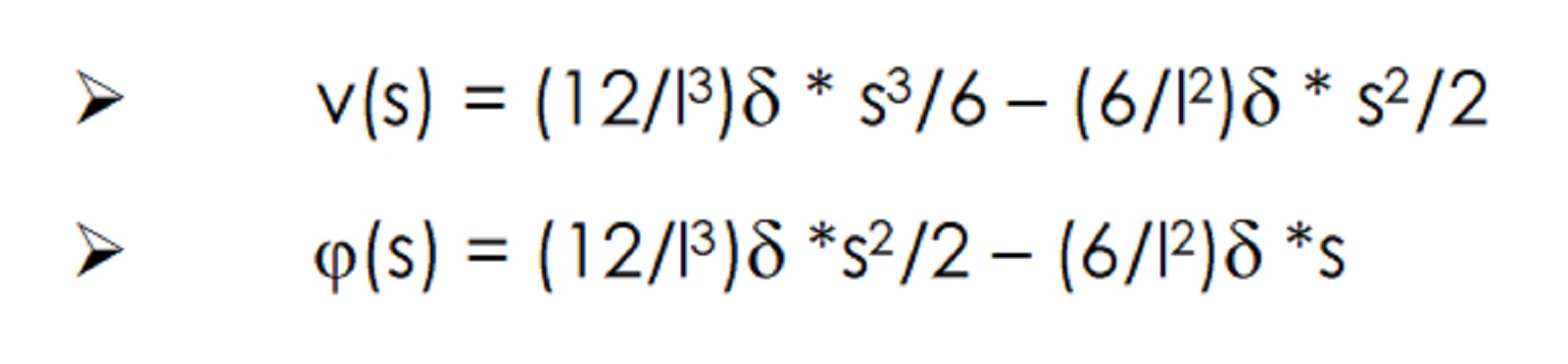
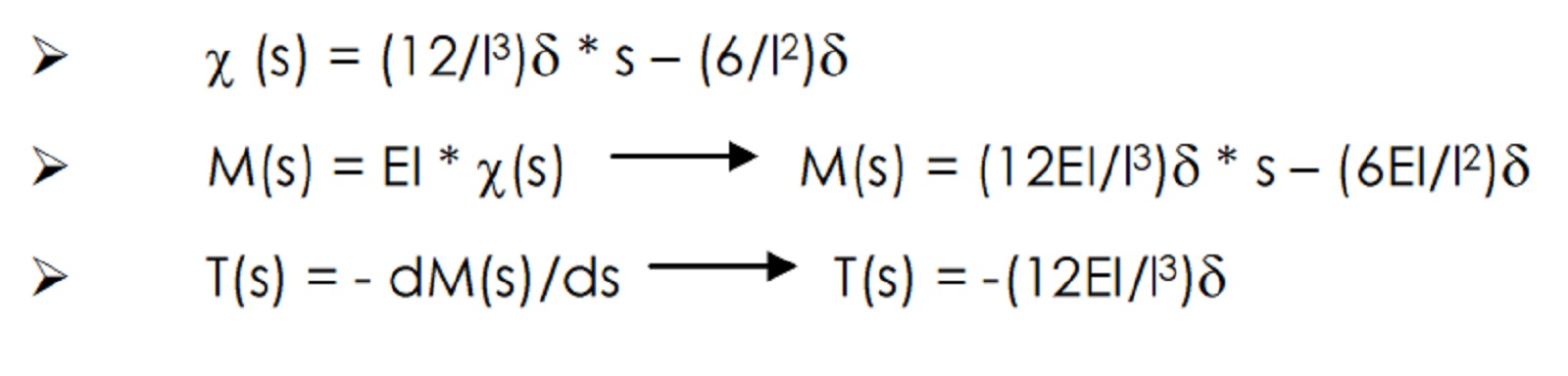
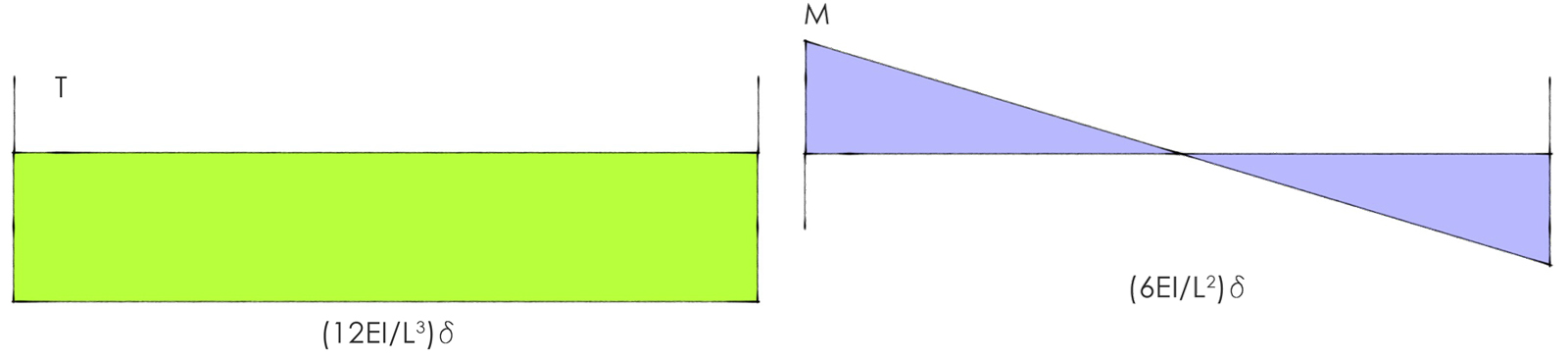
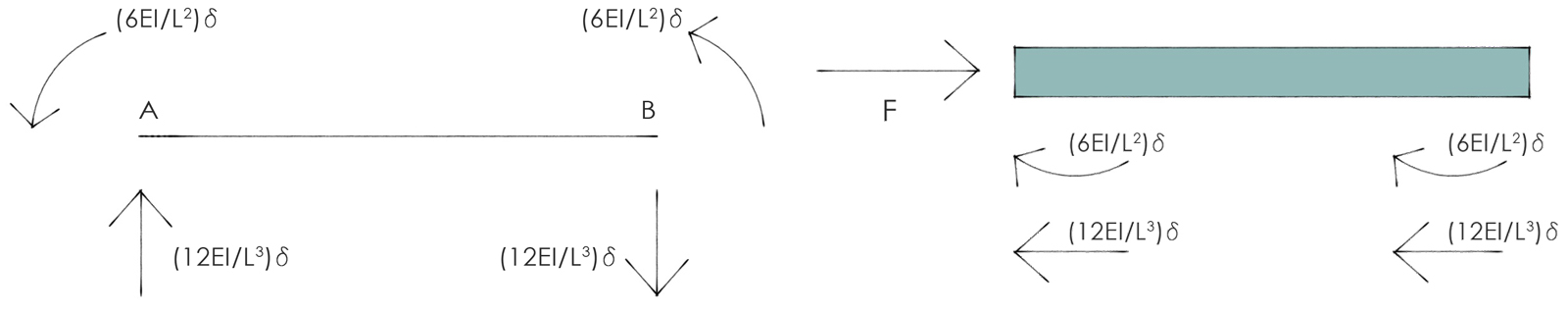
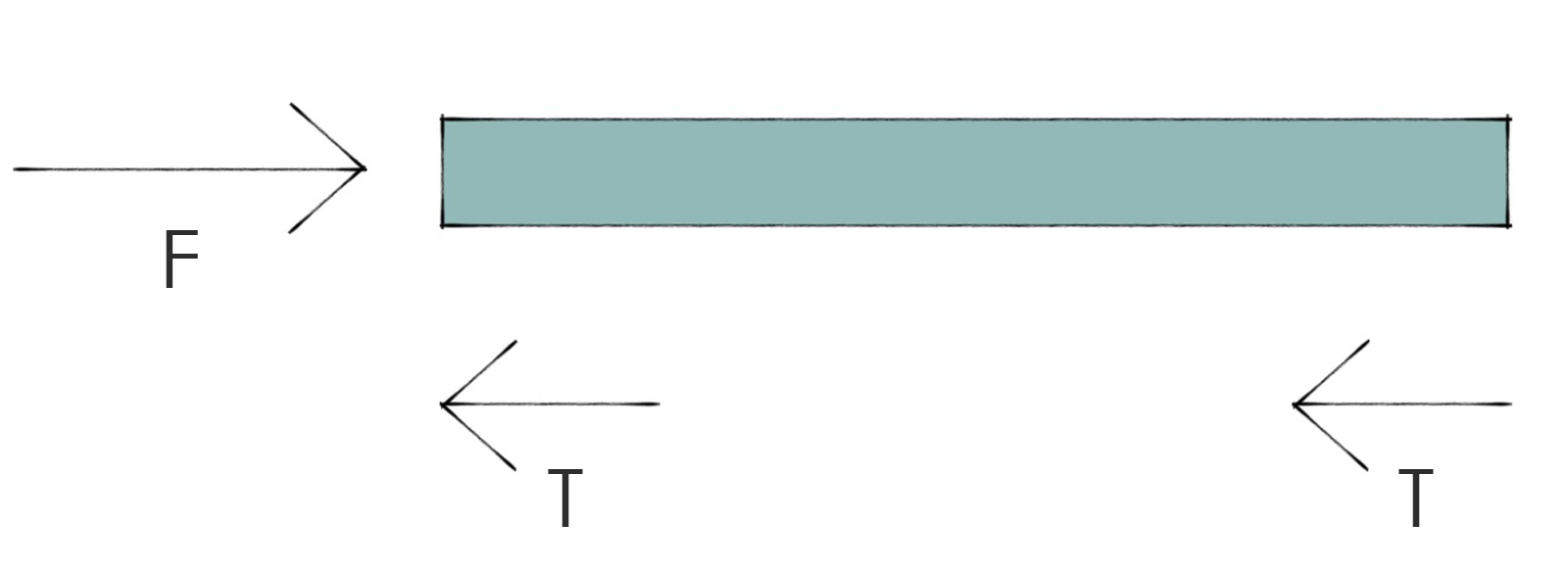
La trave in esame ha lo stesso comportamento di un telaio “shear-type” in cui conoscendo il valore degli spostamenti δ è possibile determinare il valore delle caratteristiche di sollecitazione e delle rigidezze dei traversi. Riferendoci, infatti, ad una trave doppiamente incastrata soggetta ad un cedimento vincolare si hanno i seguenti valori notevoli del momento e del taglio nei vincoli.
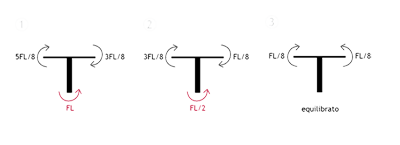
SCHEMA NOTEVOLE
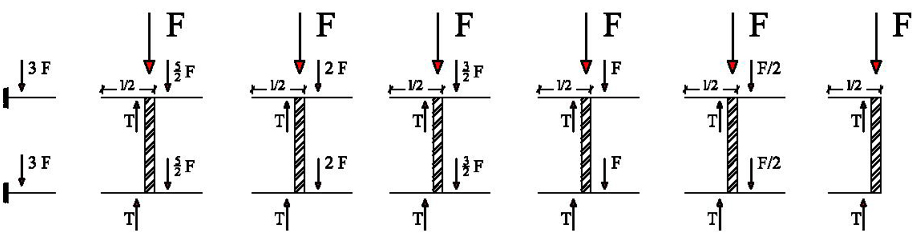
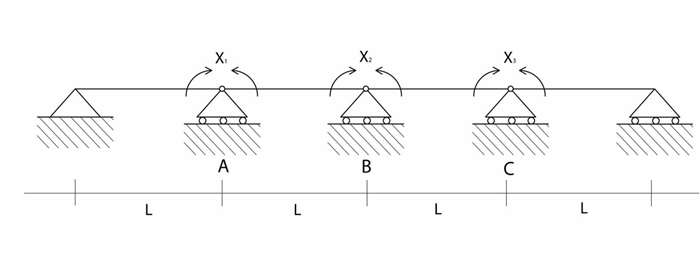
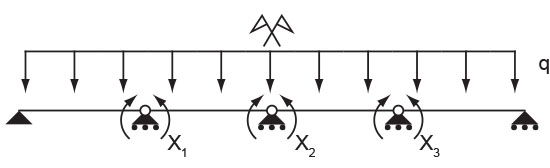
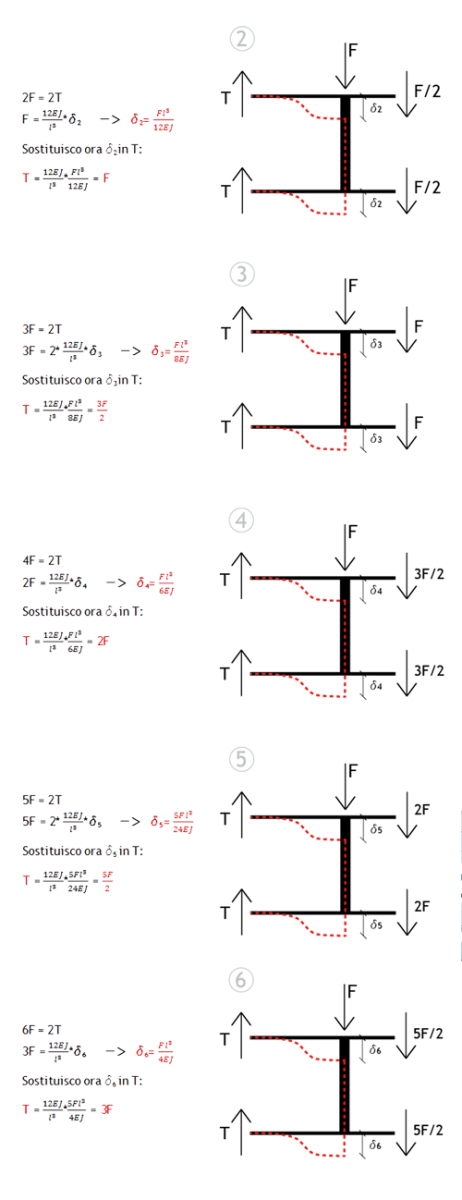
Il problema iperstatico verrà, quindi, risolto scrivendo per ogni incognita (spostamento) un’equazione alla traslazione verticale.
RISOLUZIONE: 6 equazioni alla traslazione verticale per 6 incognite (δ6, δ5,δ4,δ3,δ2,δ1)
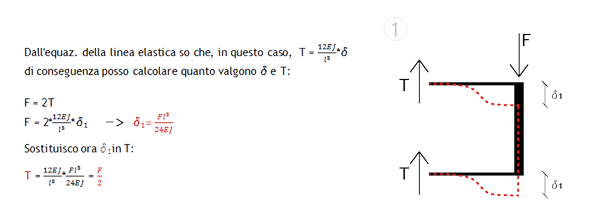
1. F = 2T → F = 24 EI/l³ δ6 → δ6= Fl³/24 EI
T = 12 EI/l³ δ6
T = 12 EI/l³ * (Fl³/24 EI) = F/2
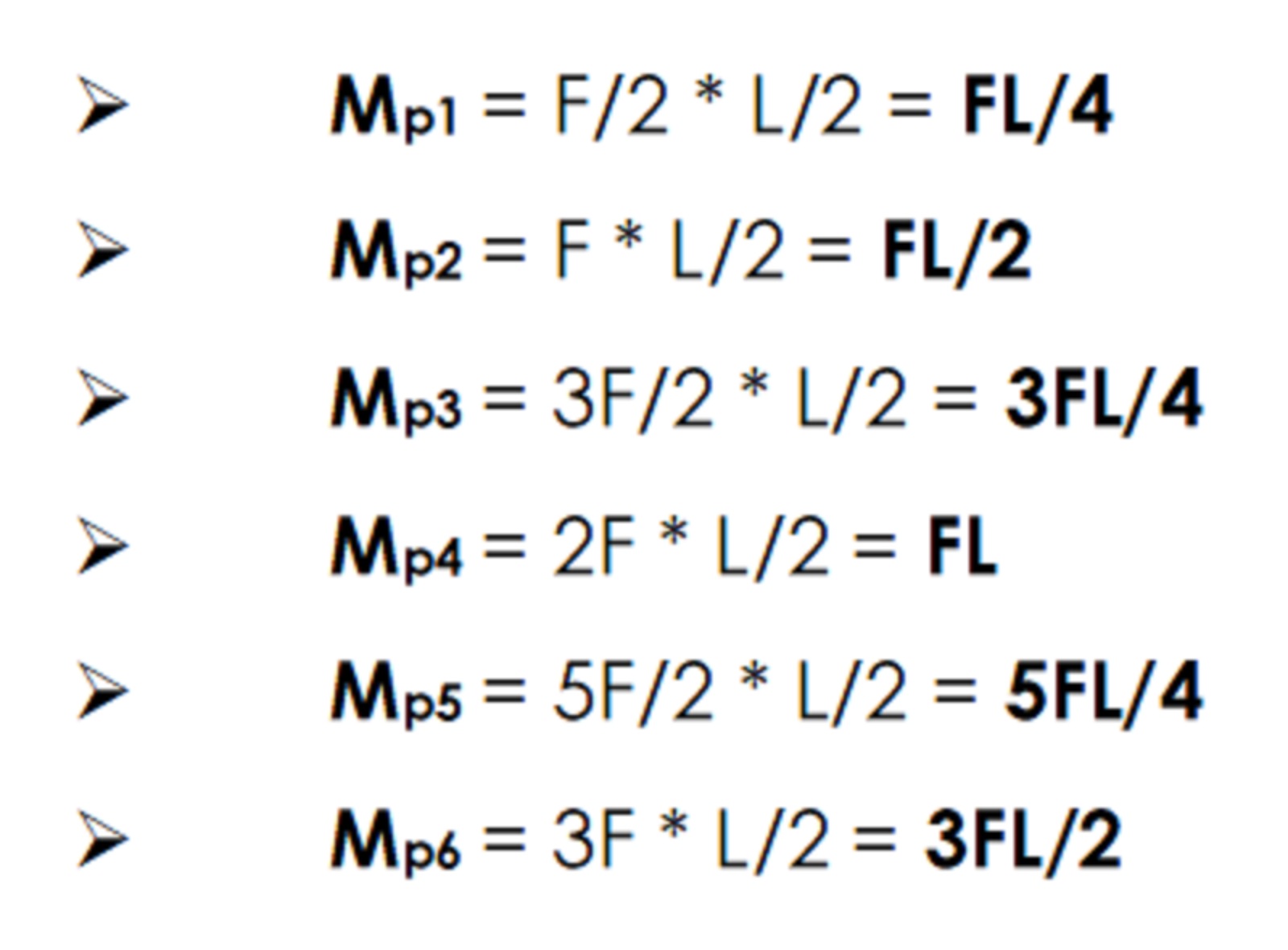
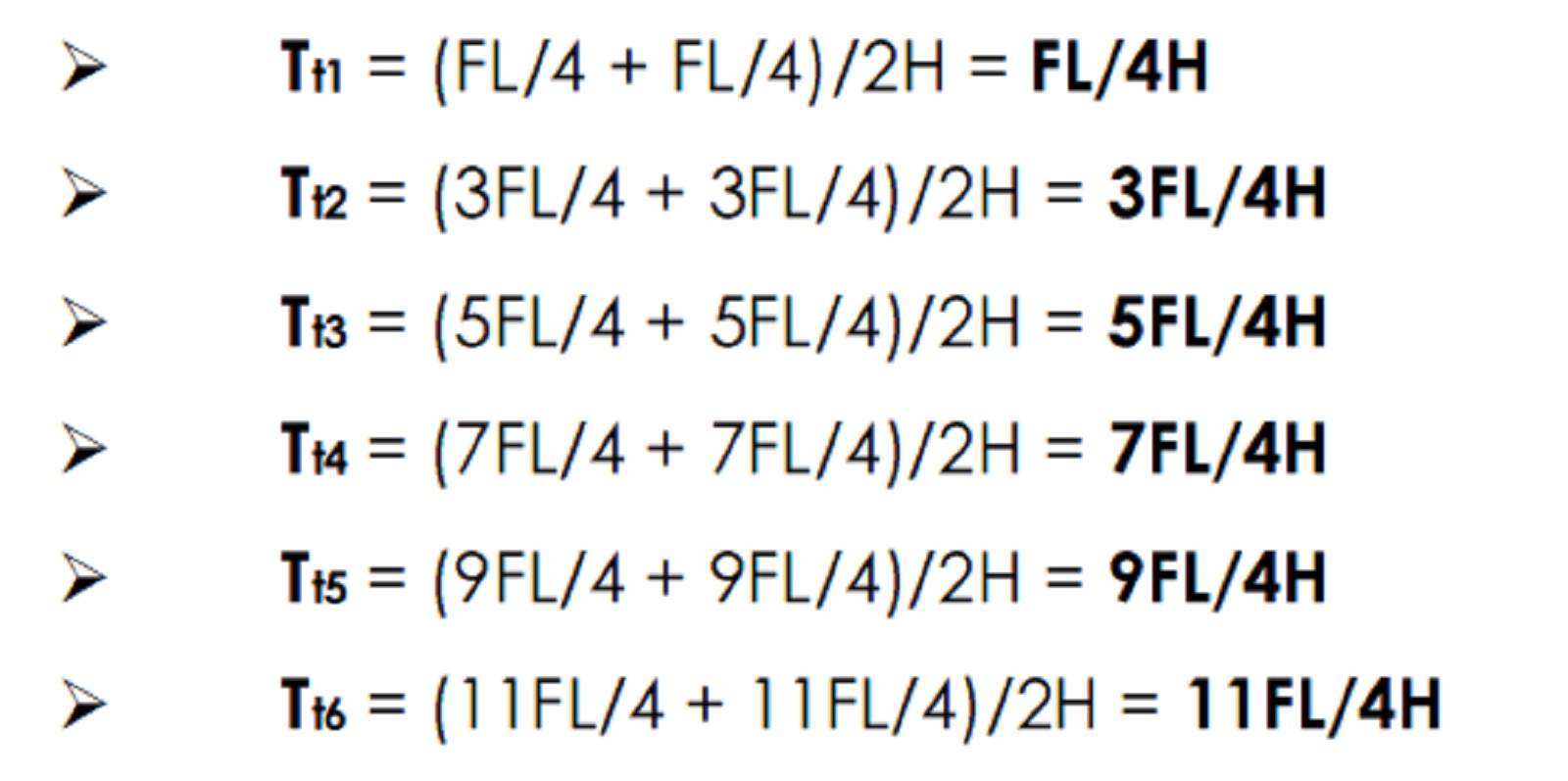
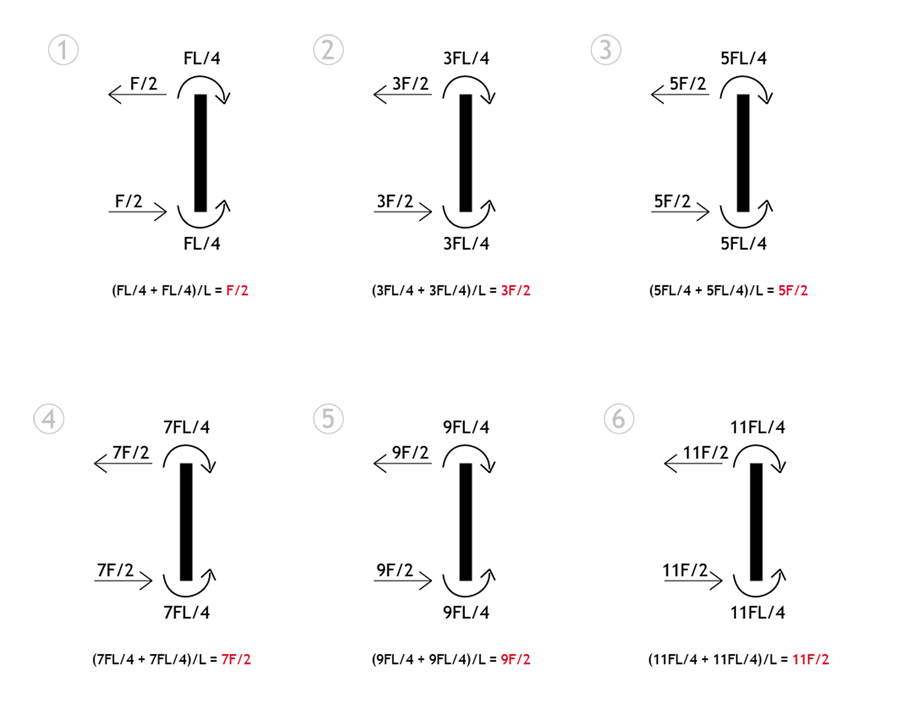
M = 6 EI/l² δ6 = Fl/4
2. F + F/2 + F/2= 2T → 2F = 24 EI/l³ δ5 → δ5= Fl³/12 EI
T = 12 EI/l³ δ5
T = 12 EI/l³ * (Fl³/12 EI) = F
M = 6 EI/l² δ5 = Fl/2
3. F + F + F= 2T → 3F = 24 EI/l³ δ4 → δ4= Fl³/8 EI
T = 12 EI/l³ δ4
T = 12 EI/l³ * (Fl³/8 EI) = 3/2F
M = 6 EI/l² δ4= 3/4 Fl
4. F + 3/2F + 3/2F= 2T → 4F = 24 EI/l³ δ3 → δ3= Fl³/6 EI
T = 12 EI/l³ δ3
T = 12 EI/l³ * (Fl³/6 EI) = 2F
M = 6 EI/l² δ3= Fl
5. F + 2F + 2F= 2T → 5F = 24 EI/l³ δ2 → δ2= 5 Fl³/ 24EI
T = 12 EI/l³ δ2
T = 12 EI/l³ * (5 Fl³/24 EI) = 5/2F
M = 6 EI/l² δ2= 5/4Fl
6. F + 5/2F + 5/2F= 2T → 6F = 24 EI/l³ δ1 → δ1= Fl³/4 EI
T = 12 EI/l³ δ1
T = 12 EI/l³ * (Fl³/4 EI) = 3F
M = 6 EI/l² δ1= 3/2 Fl
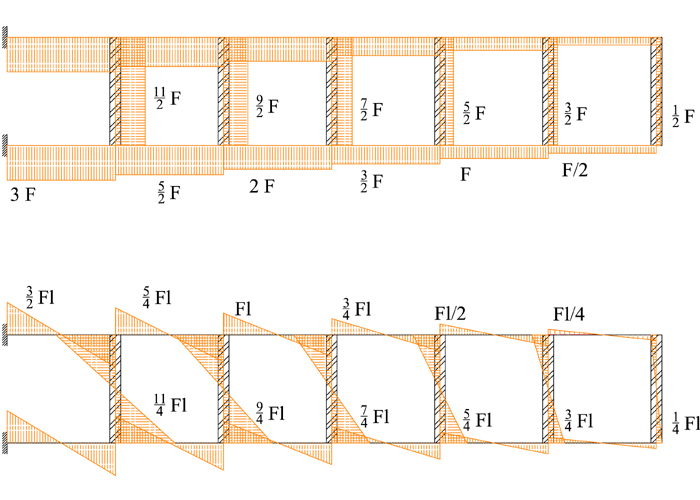
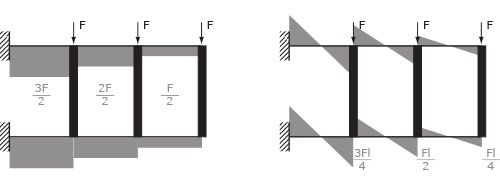
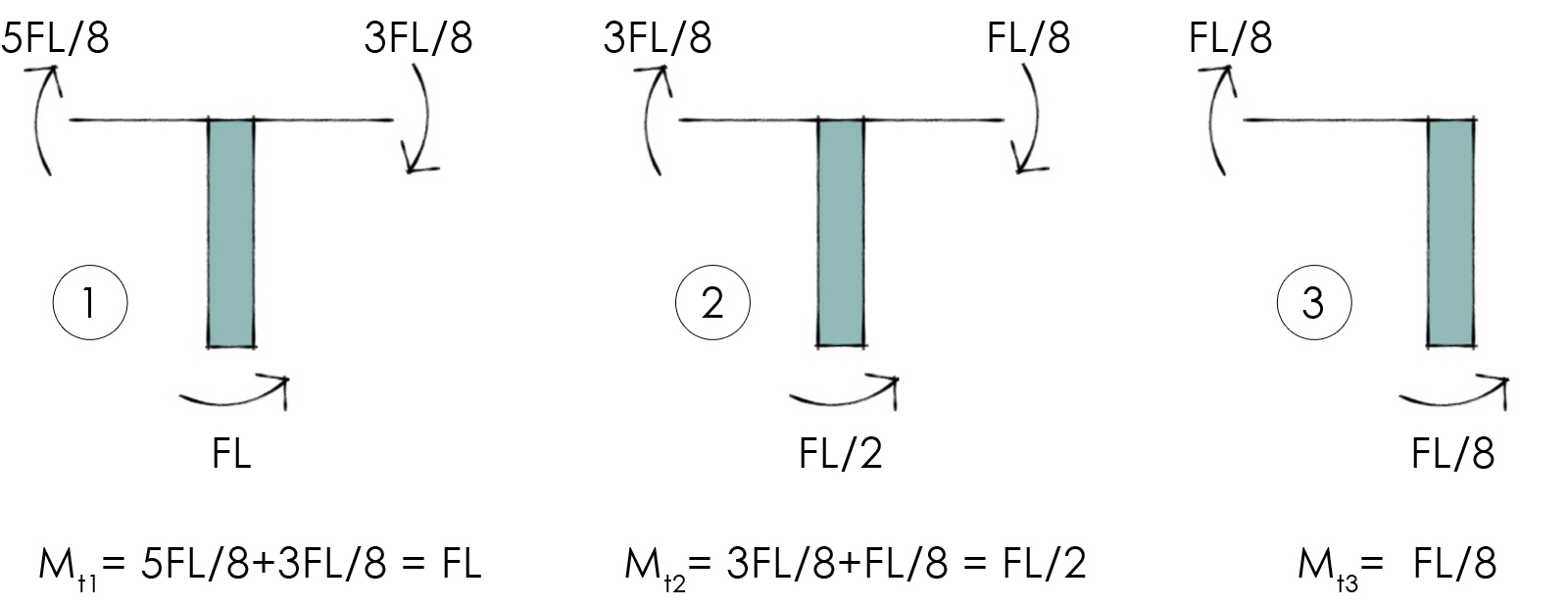
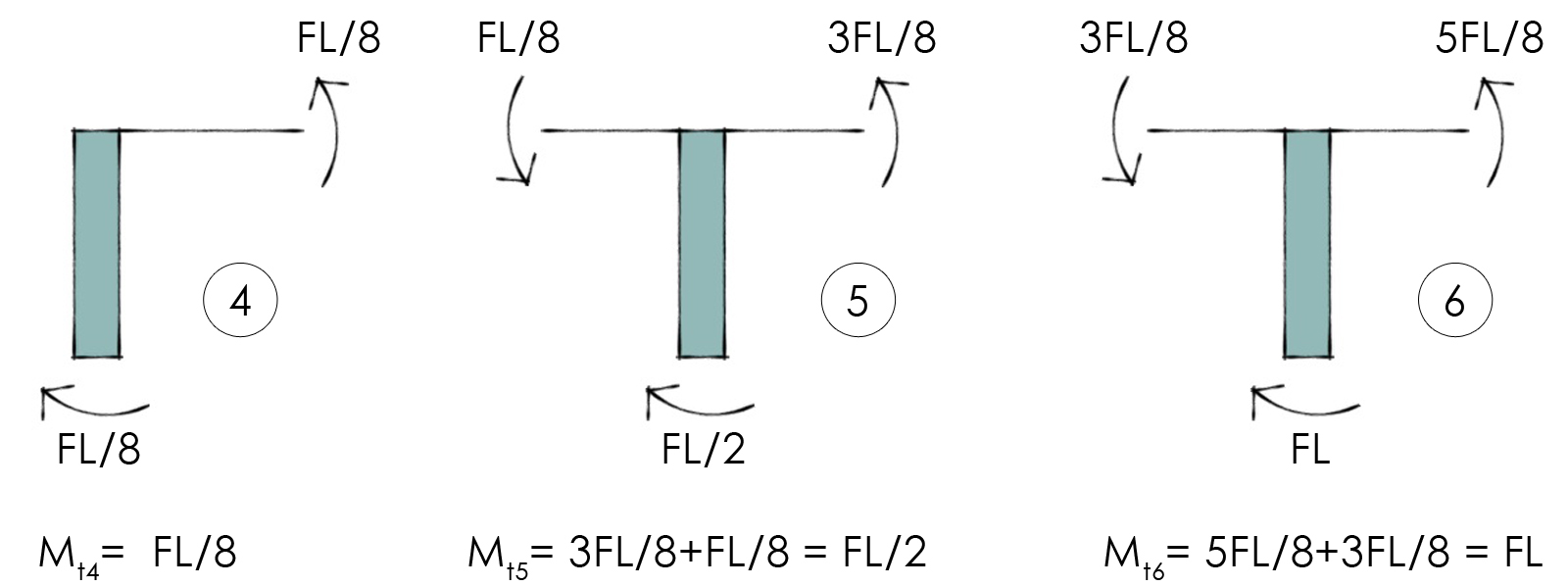
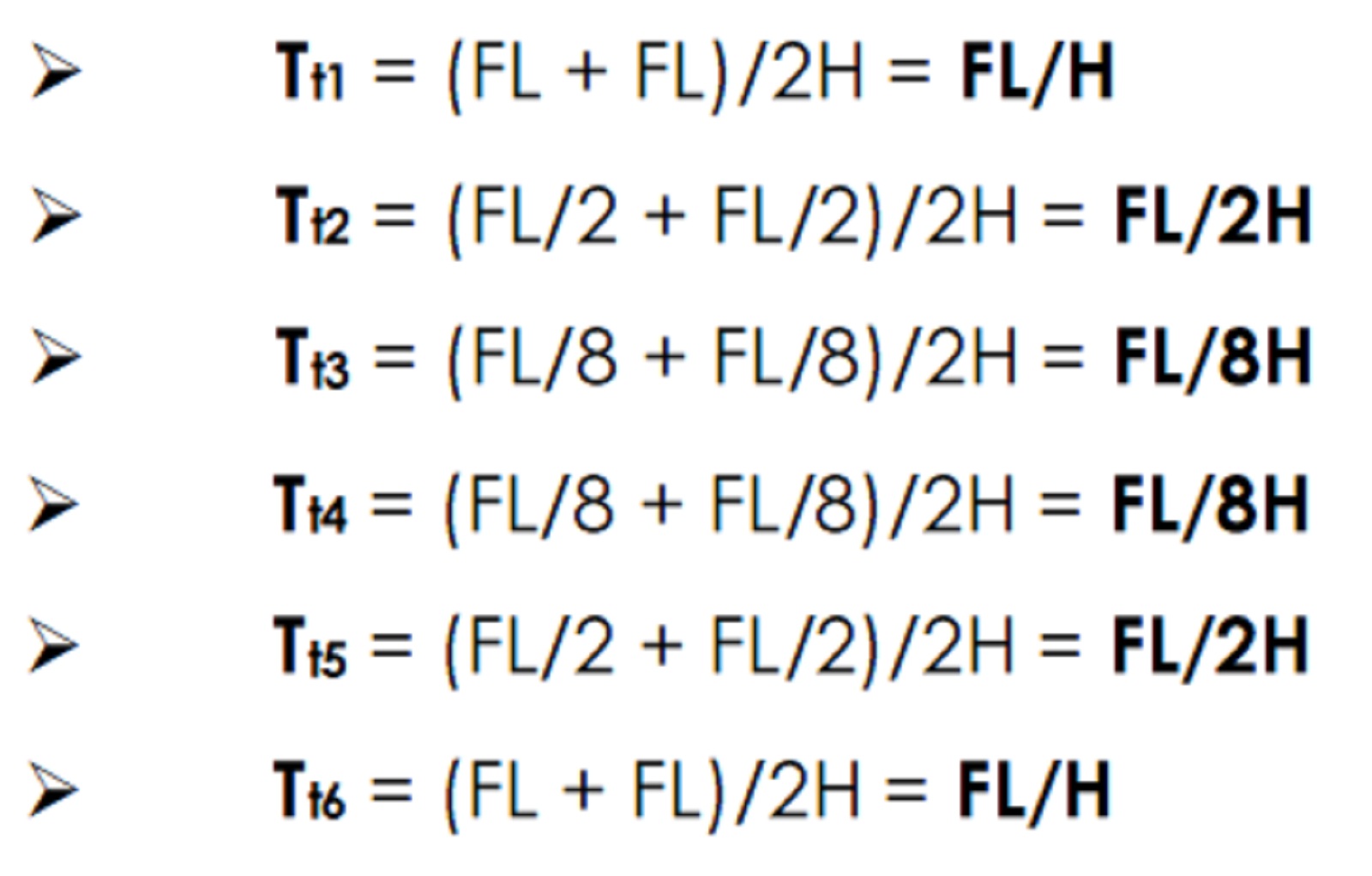
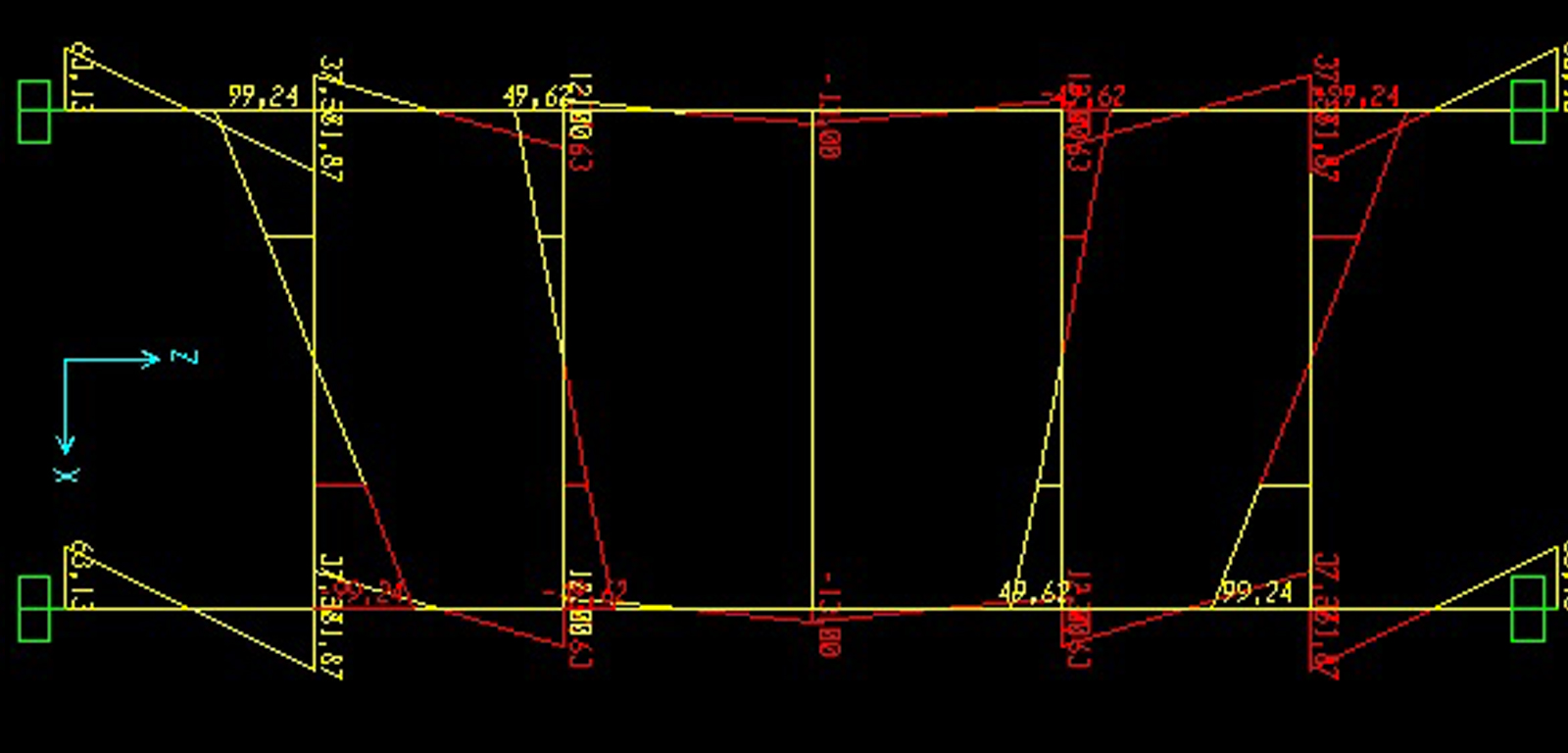
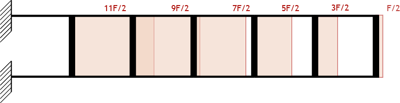
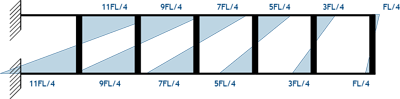
Determinato Taglio, Momento e rigidezze dei traversi, trovo momento e taglio anche nei pilastri.
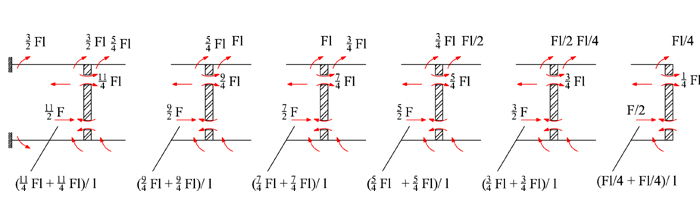
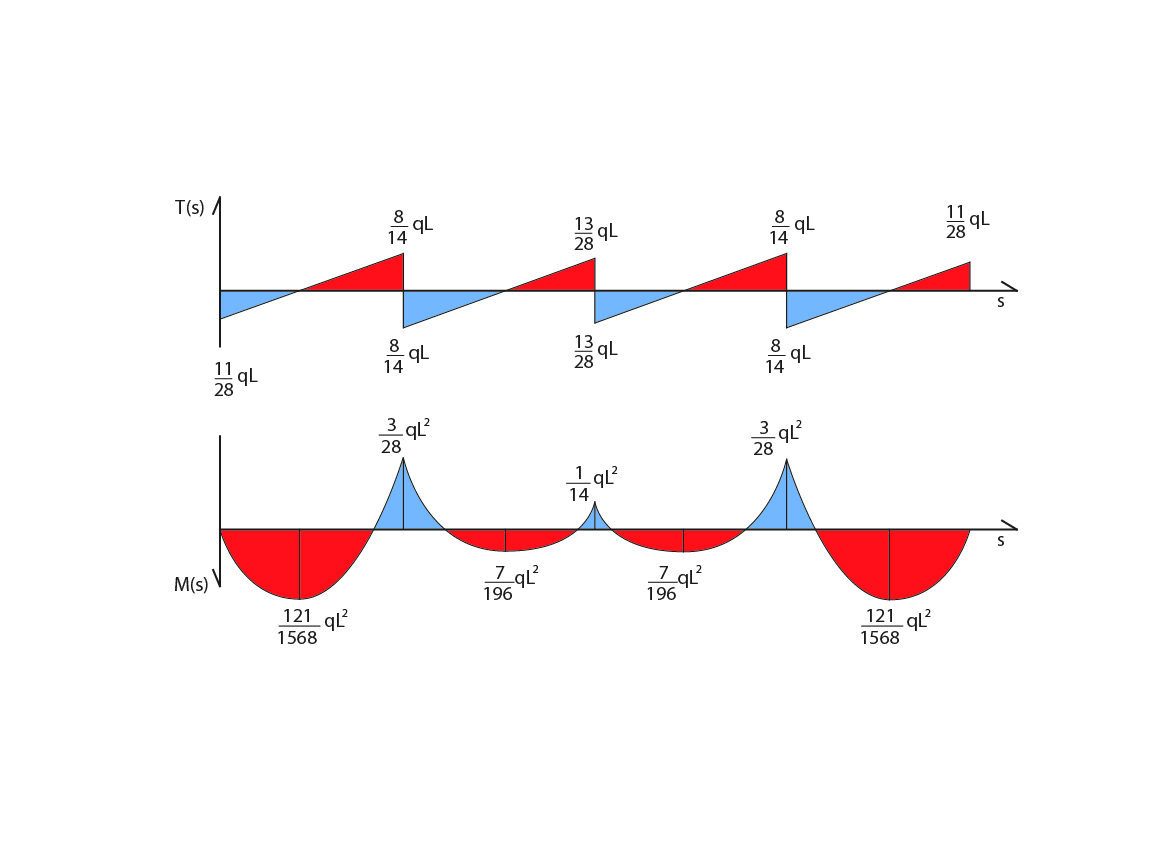
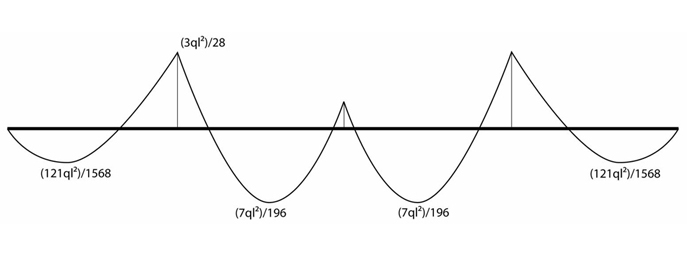
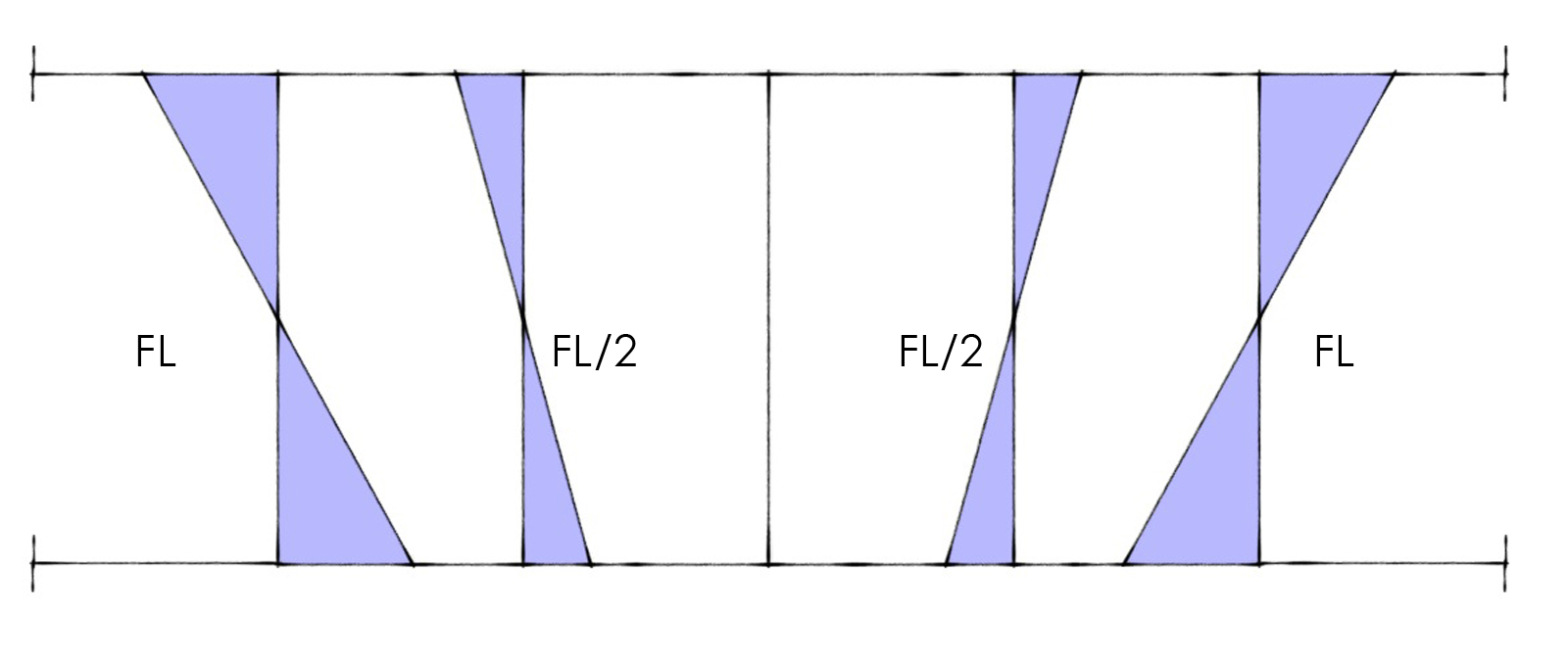
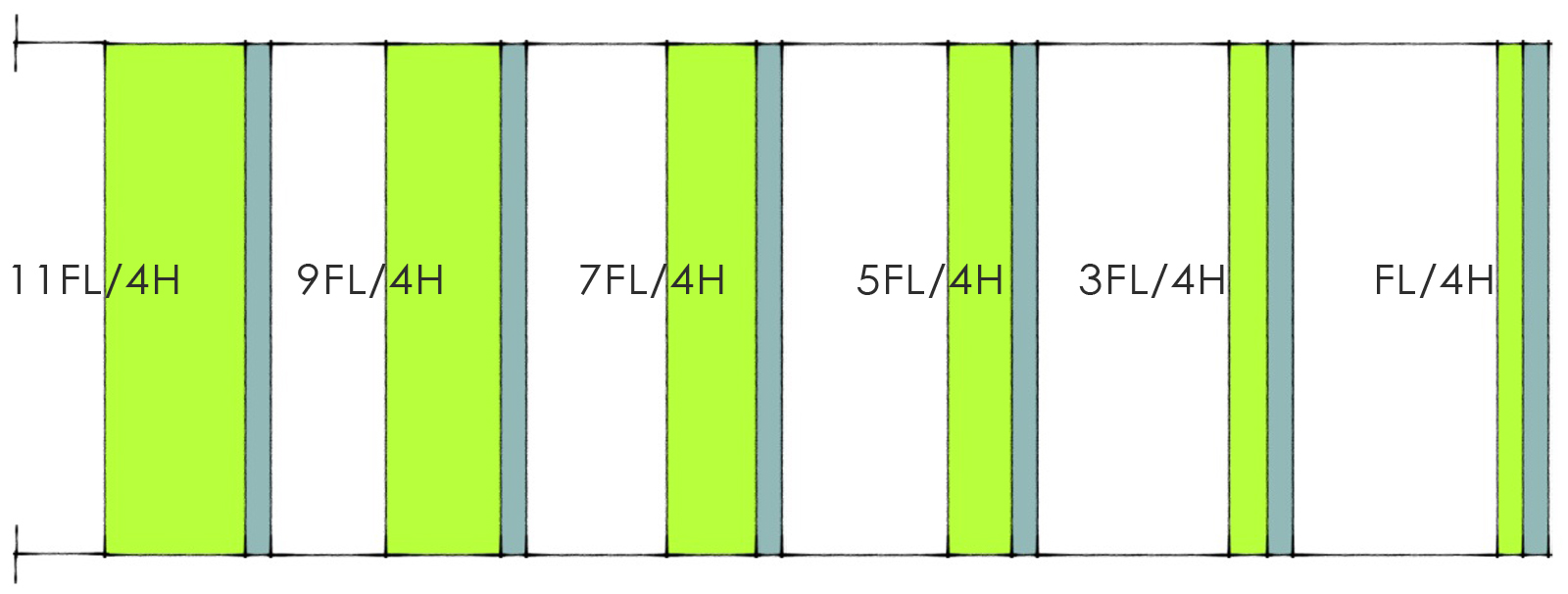
DIAGRAMMA TAGLIO E MOMENTO
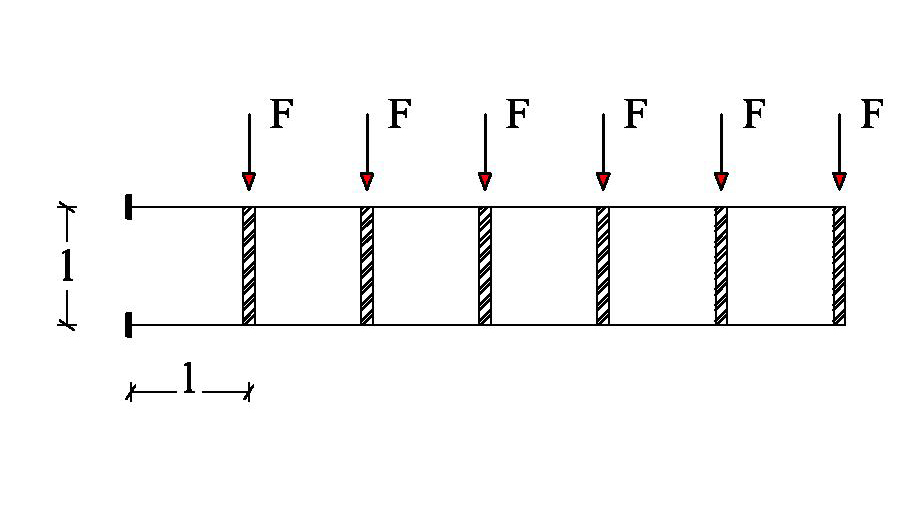
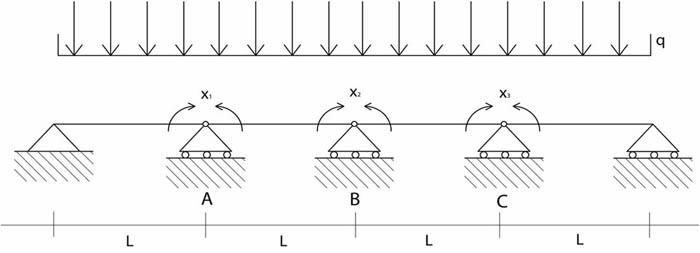
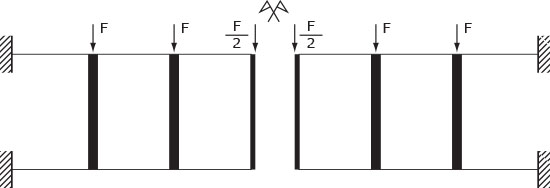
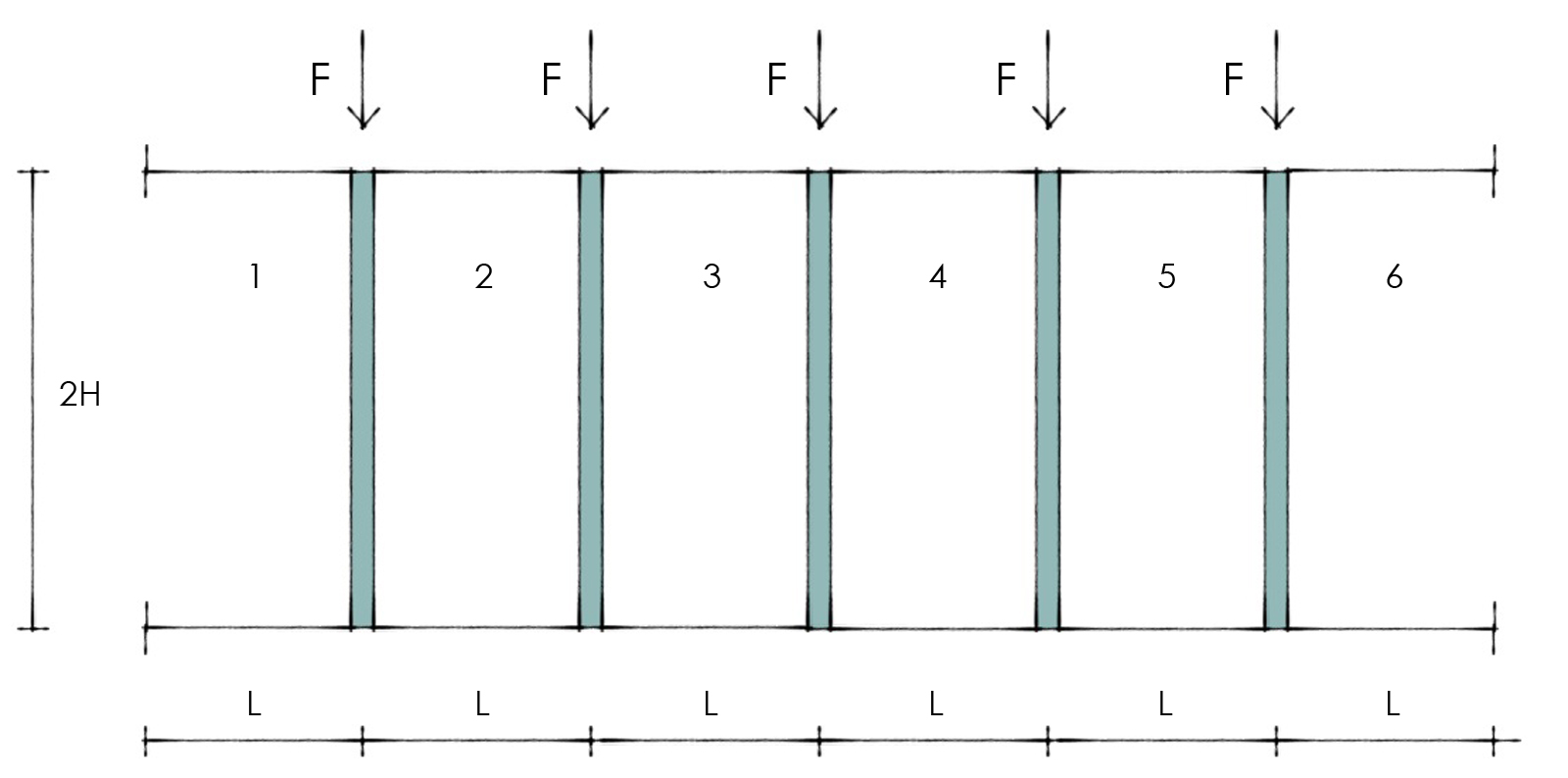
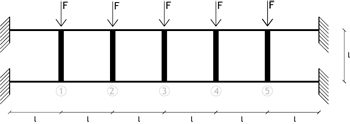
Allo stesso modo di prima, siamo in grado di risolvere lo stesso tipo di trave, stavolta doppiamente incastrata.
SCHEMA DI CALCOLO
Bisogna notare che la trave è simmetrica e simmetricamente caricata per cui basta studiarne la metà ed in corrispondenza della simmetria bisogna considerare la forza di valore pari a F/2
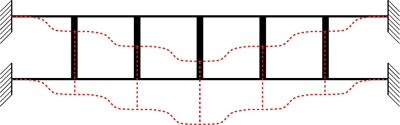
DEFORMATA

RISOLUZIONE:3 equazione alla traslazione verticale per 3incognite (δ3,δ2,δ1)
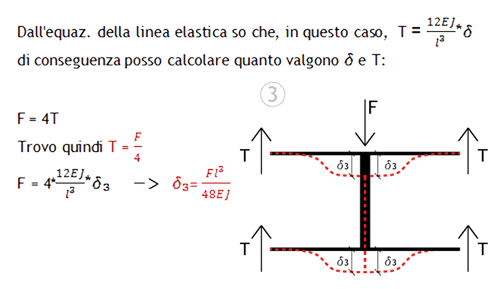
1. F/2 = 2T → F = 48 EI/l³ δ3 → δ3= Fl³/48 EI
T = 12 EI/l³ δ3
T = 12 EI/l³ * (Fl³/48 EI) = F/4
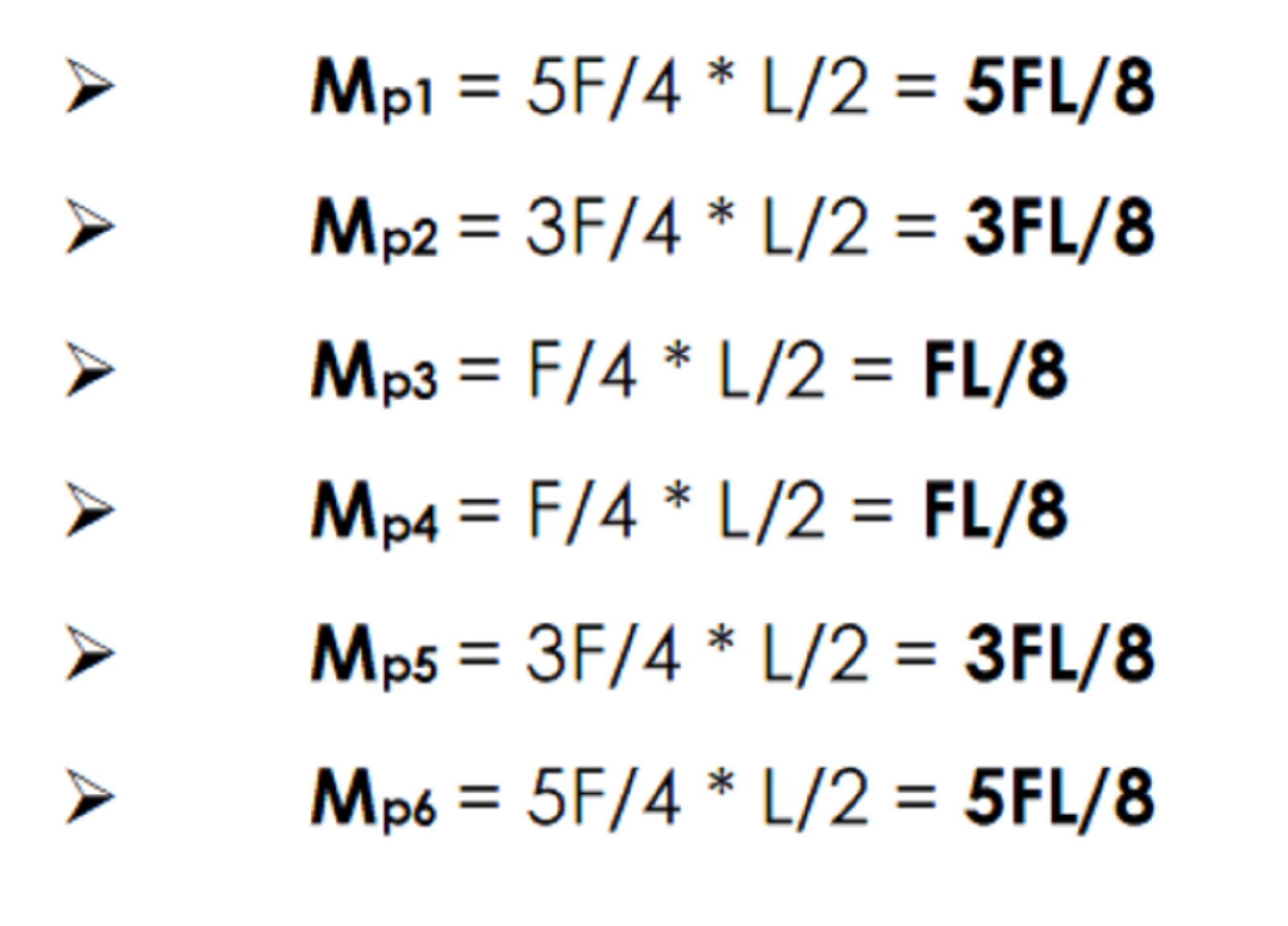
M = 6 EI/l² δ3= Fl/8
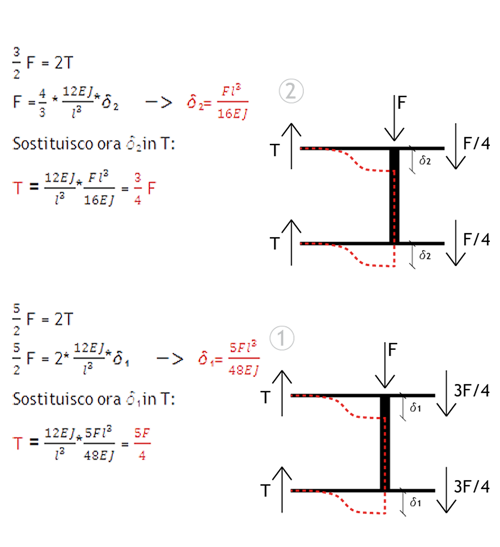
2. F + F/4 + F/4 = 2T → 3/2 F = 24 EI/l³ δ2 → δ2= Fl³/16 EI
T = 12 EI/l³ δ2
T = 12 EI/l³ * (Fl³/16 EI) = 3/4 F
M = 6 EI/l² δ2= 3/8 Fl
3. F + 3/4F + 3/4F = 2T → 5/2 F = 24 EI/l³ δ1 → δ1= 5 Fl³/48 EI
T = 12 EI/l³ δ1
T = 12 EI/l³ * (5 Fl³/48EI) = 5/4 F
M = 6 EI/l² δ1= 5/8 Fl
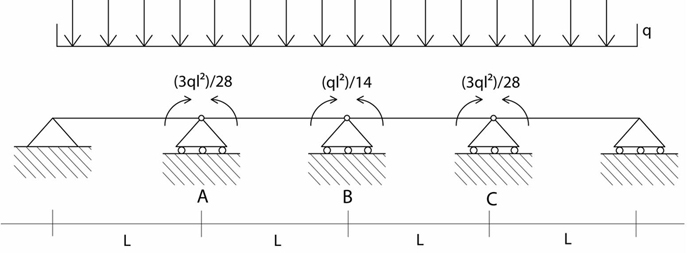
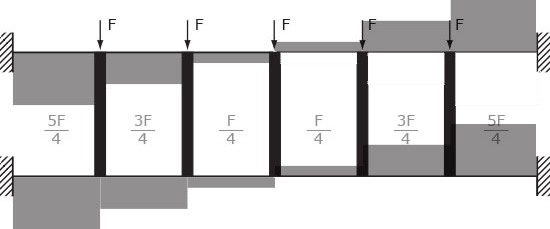
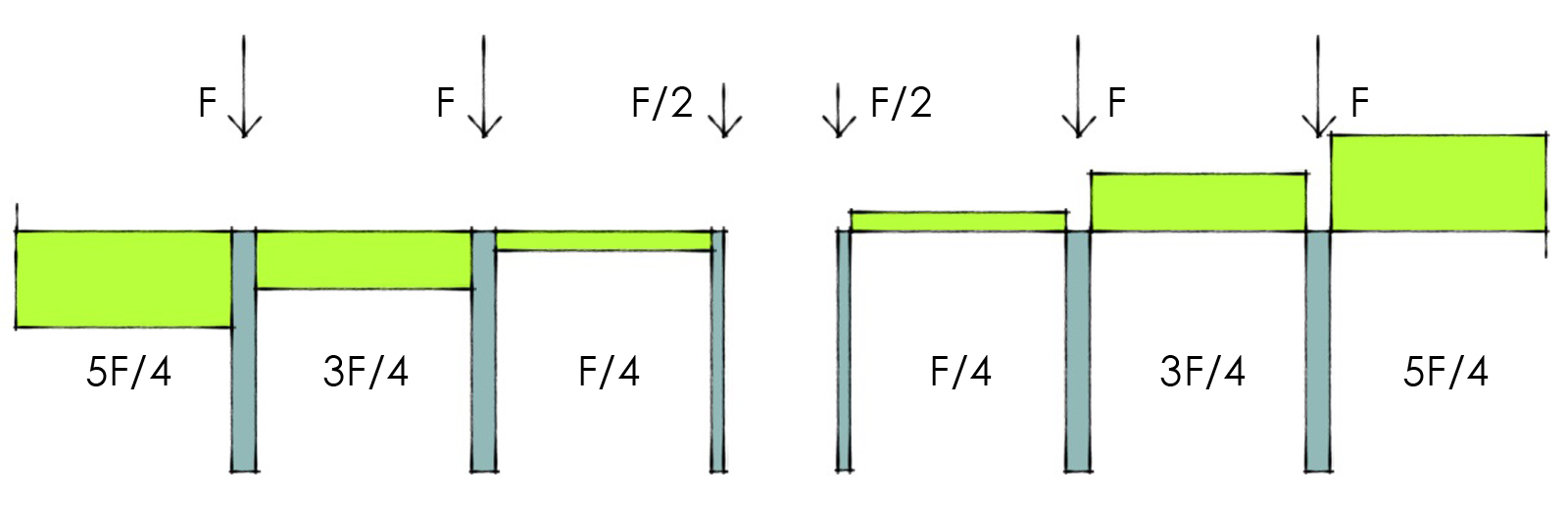
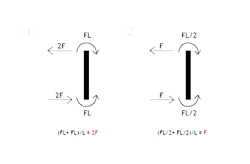
TRAVERSI
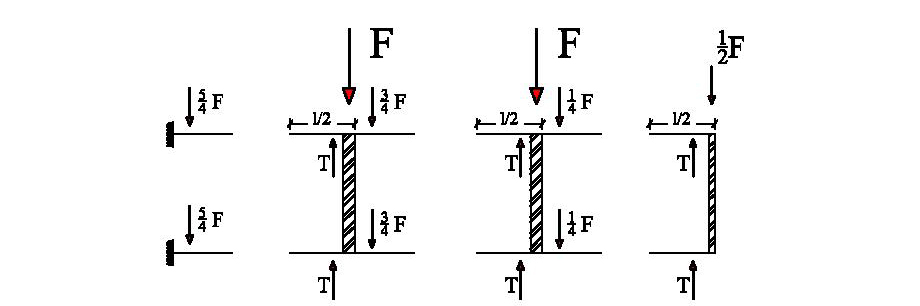
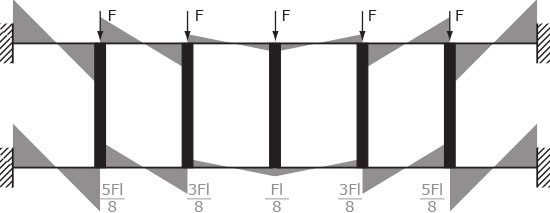
PILASTRI
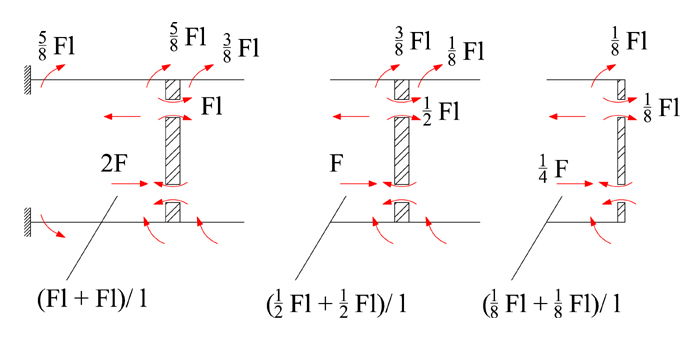
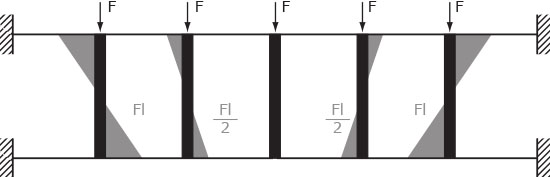
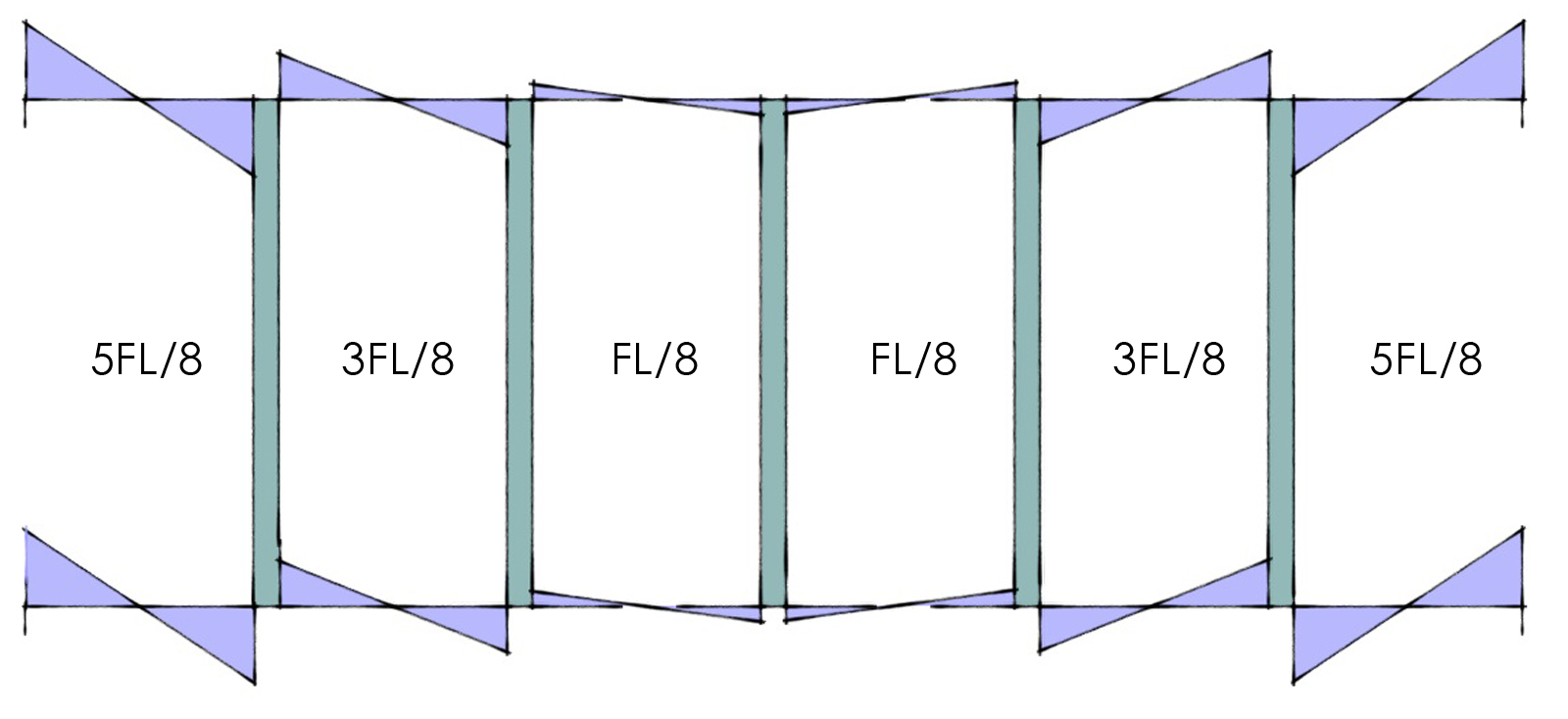
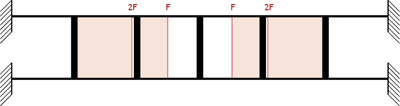
DIAGRAMMI TAGLIO E MOMENTO

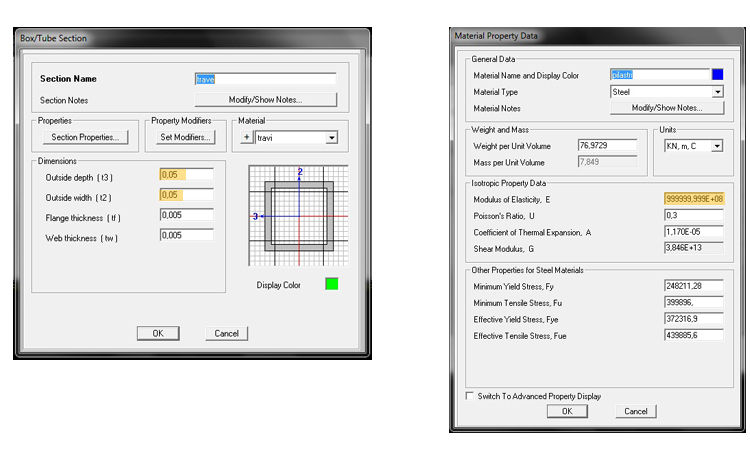
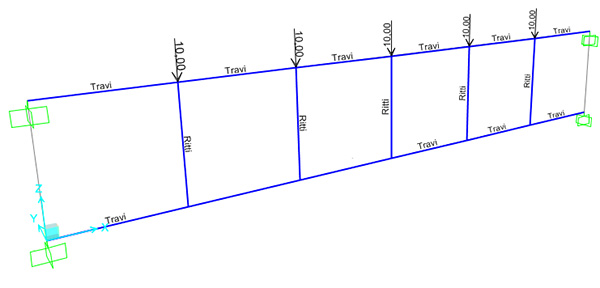
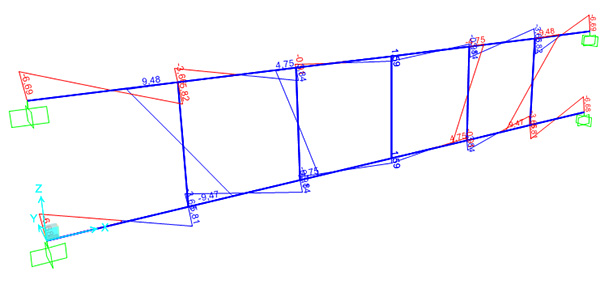
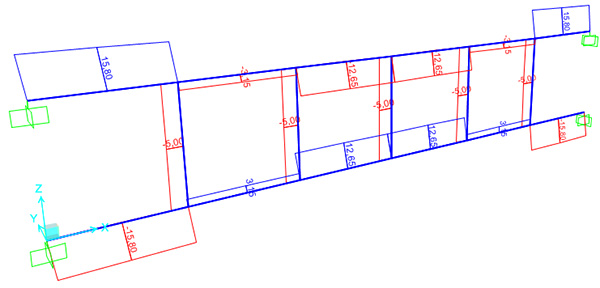
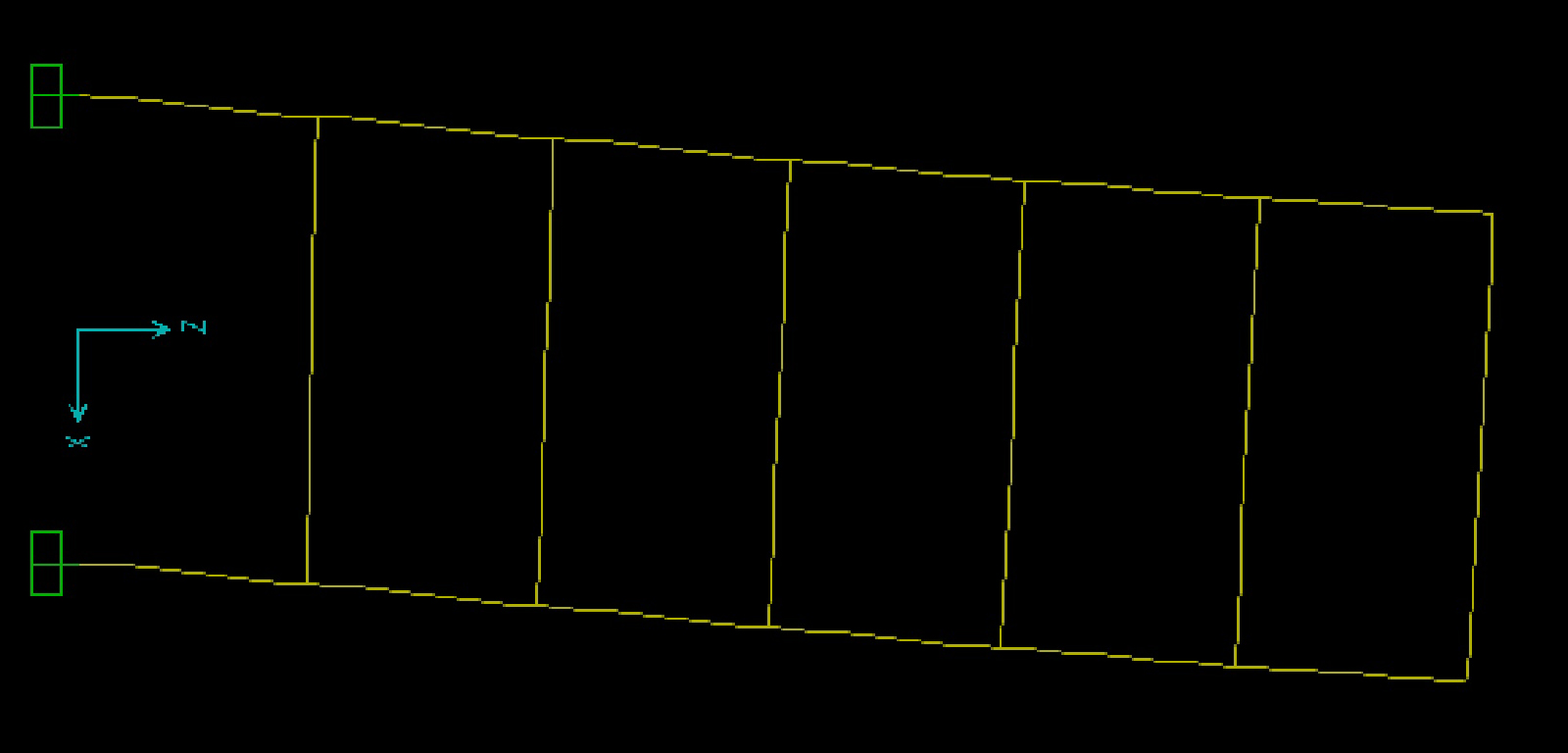
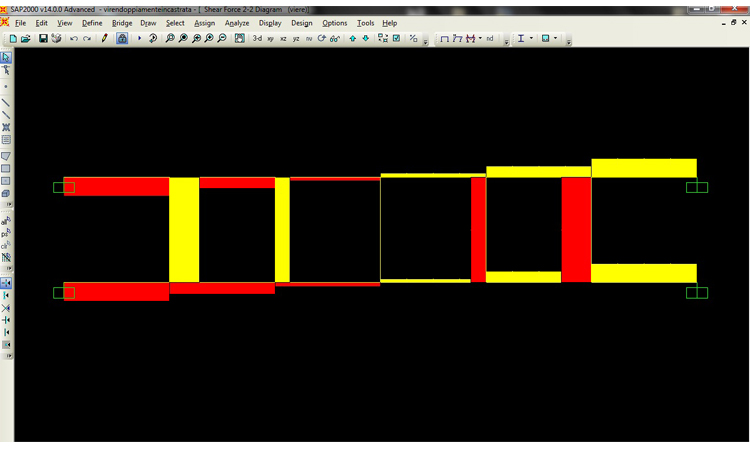
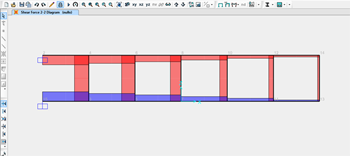
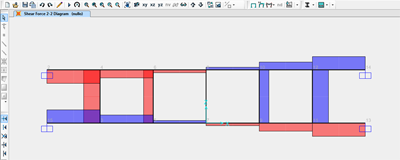
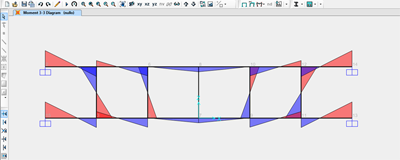
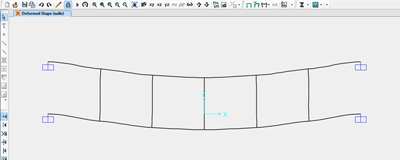
VERIFICA IN SAP2000
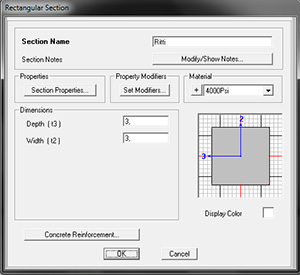
Questione cruciale consiste nel far capire al programma che i pilastri sono infinitamenti rigidi. Per fare ciò, o si dà un valore elevato al modulo di Young al materiale con cui è fatto il pilastro, o si aumenta a dismisura la sezione del pilastro stesso. In particolore ho dato un valore altissimo al modulo di Young del materiale che costituisce il pilastro a cui tra l'altro ho assegnato una sezione di 1m x 1m, mentre alla trave è stata assegnata una sezione molto piccola.
Di seguito vengono proposti gli schemi finali:
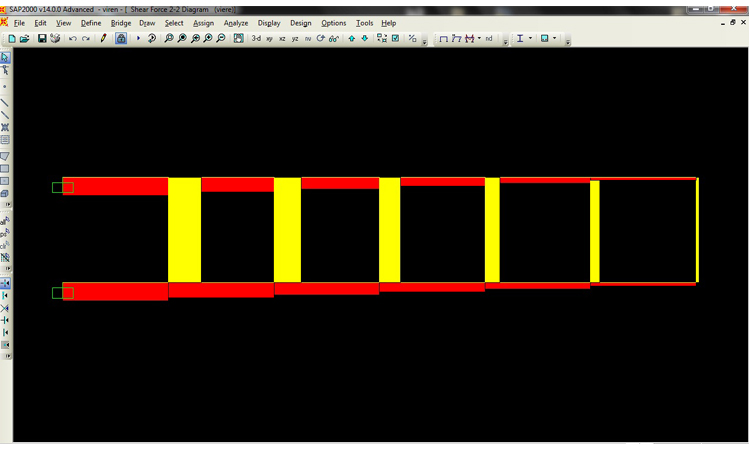
Esercizio 1
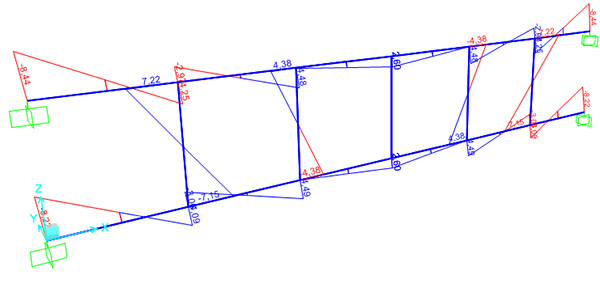
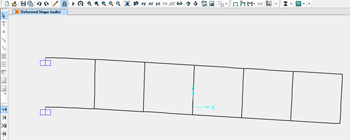
DEFORMATA
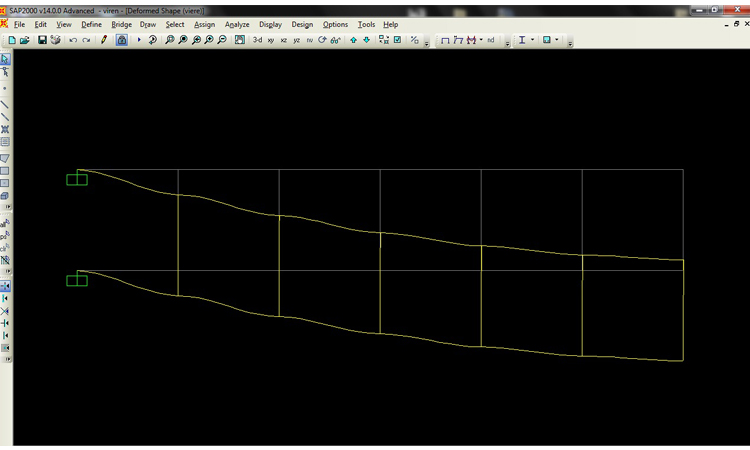
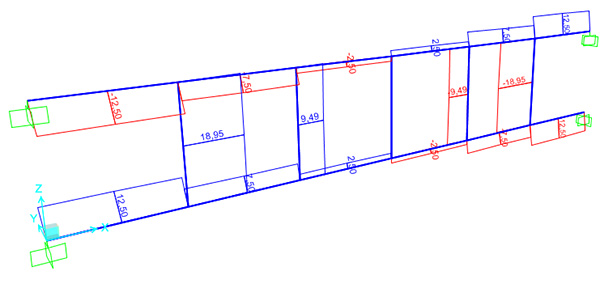
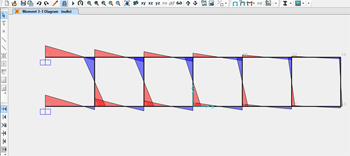
DIAGRAMMA MOMENTO
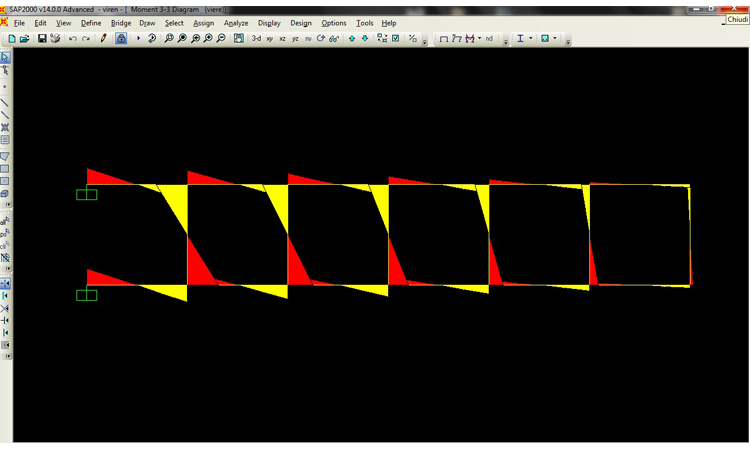
DIAGRAMMA TAGLIO
Esercizio 2
DEFORMATA
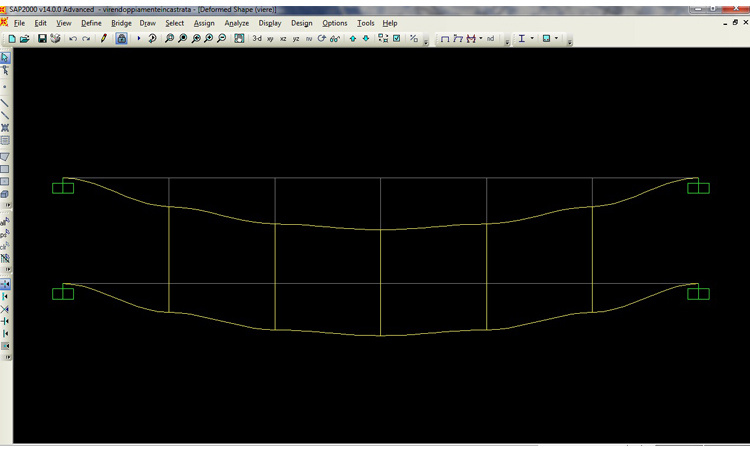
DIAGRAMMA MOMENTO
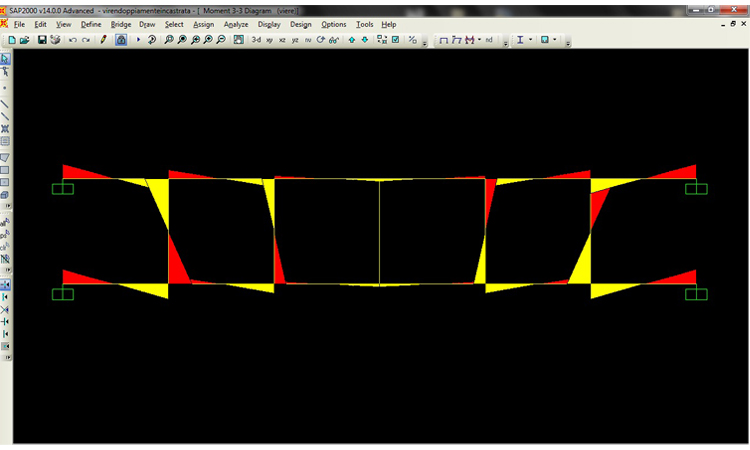
DIAGRAMMA TAGLIO




 Per via delle sua trave indeformabile lo spostamento in una trave ShearType non può essere diverso da quello rappresentato in figura poichè le travi in generale si ammettono indeformabili assialmente.
Per via delle sua trave indeformabile lo spostamento in una trave ShearType non può essere diverso da quello rappresentato in figura poichè le travi in generale si ammettono indeformabili assialmente.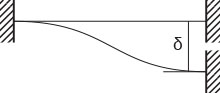















 NUOVO.png)



_(LM_PA)/2013/trave a sbalzo 1_0.jpg)
_(LM_PA)/2013/trave a sbalzo 4.jpg)
_(LM_PA)/2013/trave a sbalzo 2b.jpg)
_(LM_PA)/2013/trave a sbalzo 3.jpg)
_(LM_PA)/2013/trave a sbalzo 5.jpg)
_(LM_PA)/2013/trave a sbalzo 6.jpg)
_(LM_PA)/2013/trave a sbalzo 7.jpg)
_(LM_PA)/2013/trave a sbalzo 8.jpg)
_(LM_PA)/2013/sap sbalzo 1_0.jpg)
_(LM_PA)/2013/sap sbalzo 2_0.jpg)
_(LM_PA)/2013/sap sbalzo 3_0.jpg)
_(LM_PA)/2013/ponte 1.jpg)
_(LM_PA)/2013/ponte 2.jpg)
_(LM_PA)/2013/ponte 3.jpg)
_(LM_PA)/2013/ponte 4.jpg)
_(LM_PA)/2013/ponte 5.jpg)
_(LM_PA)/2013/ponte 6.jpg)
_(LM_PA)/2013/ponte 7.jpg)
_(LM_PA)/2013/sap ponte 1.jpg)
_(LM_PA)/2013/sap ponte 2.jpg)
_(LM_PA)/2013/sap ponte 3.jpg)